TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025019713
公報種別
公開特許公報(A)
公開日
2025-02-07
出願番号
2023123469
出願日
2023-07-28
発明の名称
多段圧延機の形状制御方法
出願人
株式会社神戸製鋼所
代理人
弁理士法人ATEN
主分類
B21B
37/00 20060101AFI20250131BHJP(本質的には材料の除去が行なわれない機械的金属加工;金属の打抜き)
要約
【課題】パスの開始時のアクチュエータの初期位置を適切な位置に設定する。
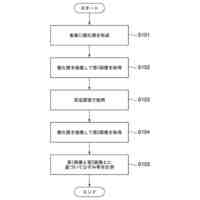
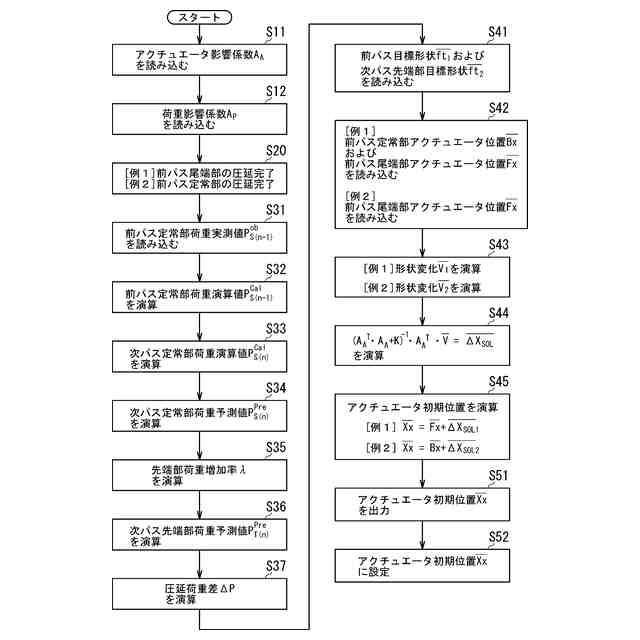
【解決手段】圧延荷重差演算ステップ(S37)は、実測された前パス定常部荷重実測値と演算された次パス先端部荷重予測値とを用いて、圧延荷重差ΔPを演算する。アクチュエータ初期位置演算ステップ(S41~S45)は、演算された圧延荷重差ΔPに因る被圧延材Wの形状の変化と、n回目の圧延パスにおける先端部の目標形状と、に基づいて、アクチュエータ初期位置Xxを演算する。アクチュエータ設定ステップ(S52)は、n回目の圧延パスでの被圧延材Wの圧延開始前に、形状制御アクチュエータ53の位置を、演算されたアクチュエータ初期位置Xxに設定する。
【選択図】図6
特許請求の範囲
【請求項1】
多段圧延機の形状制御方法であって、
前記多段圧延機は、被圧延材の板幅方向における前記被圧延材の平坦度の分布である形状を制御する形状制御アクチュエータを備え、前記被圧延材の圧延方向を圧延パス毎に入れ替えながら前記被圧延材を圧延するリバース圧延を行うものであり、
nを2以上の整数としたとき、n-1回目の圧延パスにおける前記被圧延材の定常部の圧延荷重の実測値である前パス定常部荷重実測値を実測する前パス定常部荷重実測ステップと、
n回目の圧延パスにおける前記被圧延材の先端部の圧延荷重の予測値である次パス先端部荷重予測値を演算する次パス先端部荷重予測値演算ステップと、
実測された前記前パス定常部荷重実測値と演算された前記次パス先端部荷重予測値とを用いて、n-1回目の圧延パスにおける前記被圧延材の圧延荷重とn回目の圧延パスにおける前記先端部の圧延荷重との差である圧延荷重差を演算する圧延荷重差演算ステップと、
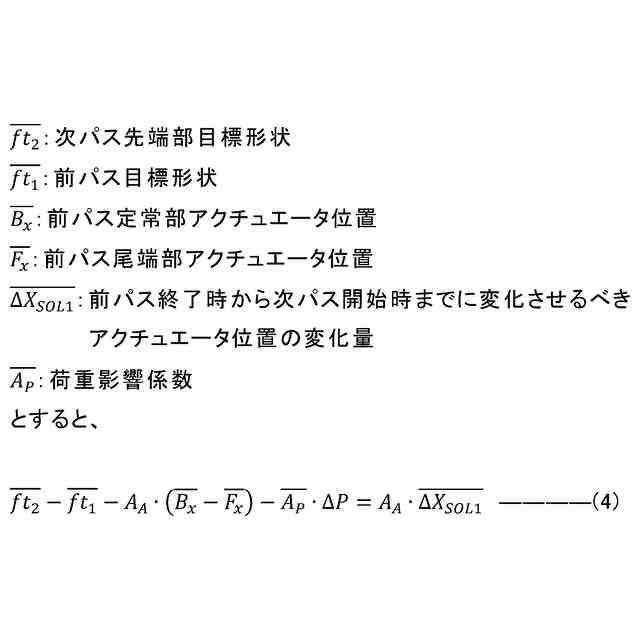
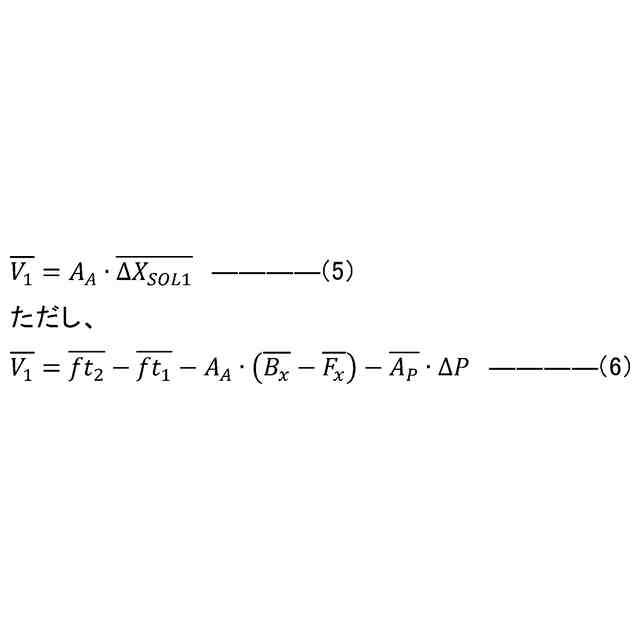
演算された前記圧延荷重差に因る前記被圧延材の形状の変化と、n回目の圧延パスにおける前記先端部の目標形状と、に基づいて、n回目の圧延パスにおいて前記先端部を圧延する時の前記形状制御アクチュエータの位置であるアクチュエータ初期位置を演算するアクチュエータ初期位置演算ステップと、
n回目の圧延パスでの前記被圧延材の圧延開始前に、前記形状制御アクチュエータの位置を、演算された前記アクチュエータ初期位置に設定するアクチュエータ設定ステップと、
を備える、多段圧延機の形状制御方法。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の多段圧延機の形状制御方法であって、
n回目の圧延パスにおける前記定常部の圧延荷重の予測値である次パス定常部荷重予測値を演算する次パス定常部荷重予測値演算ステップと、
n回目の圧延パスにおける圧延条件に基づいて、n回目の圧延パスにおける前記定常部の圧延荷重に対する、n回目の圧延パスにおける前記先端部の圧延荷重の増加率である先端部荷重増加率を演算する先端部荷重増加率演算ステップと、
を備え、
前記次パス先端部荷重予測値演算ステップは、演算された前記次パス定常部荷重予測値と、演算された前記先端部荷重増加率と、に基づいて、前記次パス先端部荷重予測値を演算する、
多段圧延機の形状制御方法。
【請求項3】
請求項2に記載の多段圧延機の形状制御方法であって、
前記圧延条件と、前記先端部の圧延荷重の実測値と、前記定常部の圧延荷重の実測値と、から、前記圧延条件と前記先端部荷重増加率との関係が、予め抽出され、
前記先端部荷重増加率演算ステップは、予め抽出された前記関係に基づいて、n回目の圧延パスにおける前記圧延条件から、前記先端部荷重増加率を演算する、
多段圧延機の形状制御方法。
【請求項4】
請求項1に記載の多段圧延機の形状制御方法であって、
前記アクチュエータ初期位置演算ステップは、前記形状制御アクチュエータの位置が前記被圧延材の形状に与える影響を示すアクチュエータ影響係数と、前記被圧延材の圧延荷重が前記被圧延材の形状に与える影響を示す荷重影響係数と、に基づいて、前記アクチュエータ初期位置を演算する、
多段圧延機の形状制御方法。
【請求項5】
請求項4に記載の多段圧延機の形状制御方法であって、
前記多段圧延機は、前記被圧延材の形状を自動的に制御する自動形状制御を行うものであり、
前記アクチュエータ影響係数および前記荷重影響係数の、一方の係数または両方の係数は、前記自動形状制御に用いられる係数である、
多段圧延機の形状制御方法。
【請求項6】
請求項1に記載の多段圧延機の形状制御方法であって、
前記アクチュエータ初期位置演算ステップは、n-1回目の圧延パスの終了前の、前記被圧延材の減速中に、前記アクチュエータ初期位置を演算する、
多段圧延機の形状制御方法。
【請求項7】
請求項1~6のいずれか1項に記載の多段圧延機の形状制御方法であって、
前記形状制御アクチュエータは、ラテラル制御アクチュエータ、および、クラウン制御アクチュエータの、いずれか1つまたは両方である、
多段圧延機の形状制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被圧延材を圧延する多段圧延機の形状制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
例えば特許文献1に、多段圧延機が記載されている。この多段圧延機は、被圧延材の圧延方向を圧延パス毎に入れ替えるリバース圧延を行う。同文献の請求項1には、次回のパスの圧延開始時におけるプリセット位置に、中間ロールを移動させることが記載されている。同文献の段落0020には、このプリセット位置は、中央制御装置により予め求められていると記載されている。
【先行技術文献】
【特許文献】
【0003】
特開平4-344813号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
同文献には、この中間ロールのプリセット位置(初期位置)がどのような位置であるかは記載されていない。ここで、多段圧延機では、ロール(例えば中間ロール)は、アクチュエータにより移動させられる。同文献には、パスの開始時のアクチュエータの初期位置がどのような位置であるかは記載されていない。パスの開始時のアクチュエータの初期位置を適切な位置に設定できることが望まれている。
【0005】
そこで、本発明は、パスの開始時のアクチュエータの初期位置を、適切な位置に設定することができる、多段圧延機の形状制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
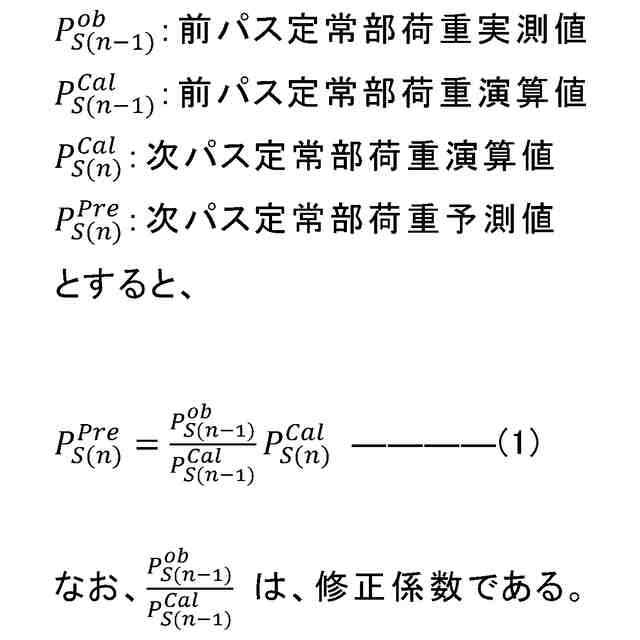
多段圧延機の形状制御方法は、前パス定常部荷重実測ステップと、次パス先端部荷重予測値演算ステップと、圧延荷重差演算ステップと、アクチュエータ初期位置演算ステップと、アクチュエータ設定ステップと、を備える。前記多段圧延機は、被圧延材の板幅方向における前記被圧延材の平坦度の分布である形状を制御する形状制御アクチュエータを備える。前記多段圧延機は、前記被圧延材の圧延方向を圧延パス毎に入れ替えながら前記被圧延材を圧延するリバース圧延を行うものである。前記前パス定常部荷重実測ステップは、nを2以上の整数としたとき、n-1回目の圧延パスにおける前記被圧延材の定常部の圧延荷重の実測値である前パス定常部荷重実測値を実測する。前記次パス先端部荷重予測値演算ステップは、n回目の圧延パスにおける前記被圧延材の先端部の圧延荷重の予測値である次パス先端部荷重予測値を演算する。圧延荷重差演算ステップは、実測された前記前パス定常部荷重実測値と演算された前記次パス先端部荷重予測値とを用いて、圧延荷重差を演算する。前記圧延荷重差は、n-1回目の圧延パスにおける前記被圧延材の圧延荷重とn回目の圧延パスにおける前記先端部の圧延荷重との差である。アクチュエータ初期位置演算ステップは、演算された前記圧延荷重差に因る前記被圧延材の形状の変化と、n回目の圧延パスにおける前記先端部の目標形状と、に基づいて、アクチュエータ初期位置を演算する。前記アクチュエータ初期位置は、n回目の圧延パスにおいて前記先端部を圧延する時の前記形状制御アクチュエータの位置である。前記アクチュエータ設定ステップは、n回目の圧延パスでの前記被圧延材の圧延開始前に、前記形状制御アクチュエータの位置を、演算された前記アクチュエータ初期位置に設定する。
【発明の効果】
【0007】
上記の多段圧延機の形状制御方法により、パスの開始時のアクチュエータの初期位置を、適切な位置に設定することができる。
【図面の簡単な説明】
【0008】
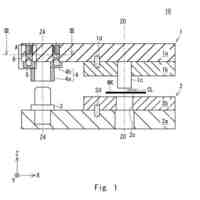
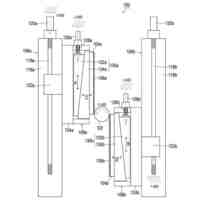
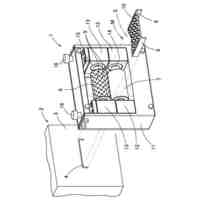
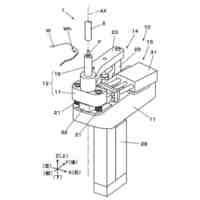
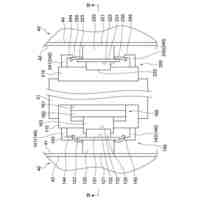
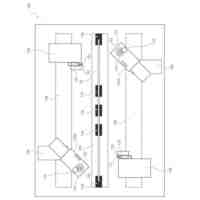
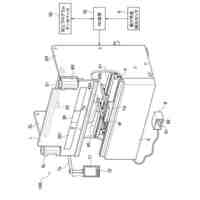
圧延システム1を示す図である。
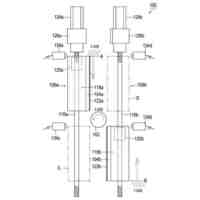
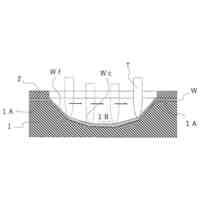
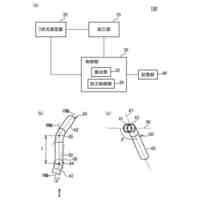
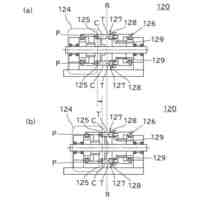
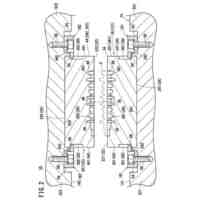
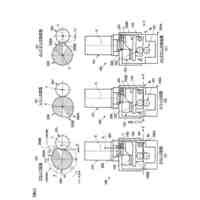
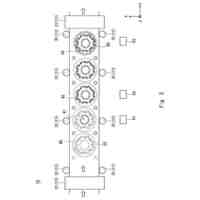
図1に示すロール群20を、ロールの軸方向から見た図である。
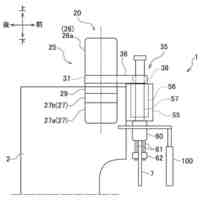
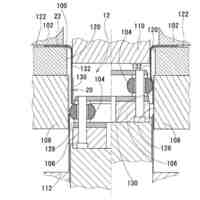
図2に示すロール群20などを、圧延方向から見た図である。
図1に示す圧延システム1での圧延に関する各種状態と時間との関係を示すグラフである。
図4に示す圧延荷重Pと時間との関係を示すグラフである。
図1に示す圧延システム1の作動のフローチャートである。
図6に示すステップS32およびステップS33で演算される定常部の圧延荷重Pの実測値と予測値との関係を表すグラフである。
図6に示すステップS35で演算される先端部荷重増加率λの実測値と予測値との関係を表すグラフである。
図1に示す圧延システム1および比較例のそれぞれで圧延したときの、形状評価関数と時間との関係を示すグラフである。
【発明を実施するための形態】
【0009】
図1~図9を参照して、圧延システム1について説明する。
【0010】
圧延システム1は、図1に示すように、被圧延材Wを圧延するシステムである。圧延システム1は、多段圧延機10と、制御装置60と、入力装置71と、教示装置73と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
棒鋼連続引抜装置
21日前
株式会社プロテリアル
鍛造装置
2か月前
株式会社オプトン
曲げ加工装置
25日前
トヨタ自動車株式会社
金型装置
2か月前
株式会社不二越
NC転造盤
25日前
株式会社不二越
NC転造盤
3か月前
日産自動車株式会社
逐次成形方法
1か月前
株式会社アマダ
曲げ加工機
20日前
株式会社カネミツ
筒張出部形成方法
2か月前
株式会社吉野機械製作所
プレス機械
2か月前
株式会社三明製作所
転造装置
2か月前
加藤軽金属工業株式会社
押出材の加工装置
1か月前
トヨタ自動車株式会社
パイプ曲げ加工装置
12日前
株式会社不二越
転造加工用平ダイス
6日前
東洋製罐株式会社
有底筒状体加工装置
3か月前
トヨタ自動車株式会社
熱間鍛造用金型
2か月前
東洋製罐株式会社
有底筒状体加工装置
1か月前
株式会社エナテック
製品分離システム
20日前
本田技研工業株式会社
鍛造用金型
26日前
株式会社カネミツ
歯付円筒体形成方法
2か月前
日本製鉄株式会社
圧延装置
24日前
トックス プレソテクニック株式会社
接合装置
19日前
日本製鉄株式会社
圧延装置
1か月前
株式会社IKS
滑り止め構造
1か月前
村田機械株式会社
情報処理装置及び情報処理方法
4か月前
個人
日本刀の製造方法
2か月前
トヨタ紡織株式会社
モータコアの製造装置
2か月前
株式会社TMEIC
板離れ防止システム
3か月前
三菱重工業株式会社
ひずみ計測方法
1か月前
アイダエンジニアリング株式会社
板状部材送り装置
2か月前
株式会社菊地機械製作所
加工装置、および加工方法
4か月前
個人
ハゼ締め装置、およびハゼ締め装置の自動動停止装置
4か月前
金田工業株式会社
はすば歯車の製造方法
3か月前
株式会社エフ・シー・シー
積層鉄心の製造装置
1か月前
トヨタ自動車株式会社
順送プレス装置、及び制御方法
2か月前
株式会社アマダ
安全確認画像の表示方法
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ