TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024174278
公報種別
公開特許公報(A)
公開日
2024-12-16
出願番号
2023100614
出願日
2023-06-20
発明の名称
製品分離システム、移載ロボット、及び搬送装置
出願人
株式会社エナテック
代理人
個人
,
個人
主分類
B21D
28/04 20060101AFI20241209BHJP(本質的には材料の除去が行なわれない機械的金属加工;金属の打抜き)
要約
【課題】接続部で接続された製品をワークから分離する動作精度を高めることができる製品分離システムを提供する。
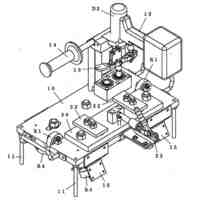
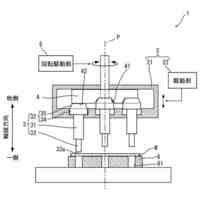
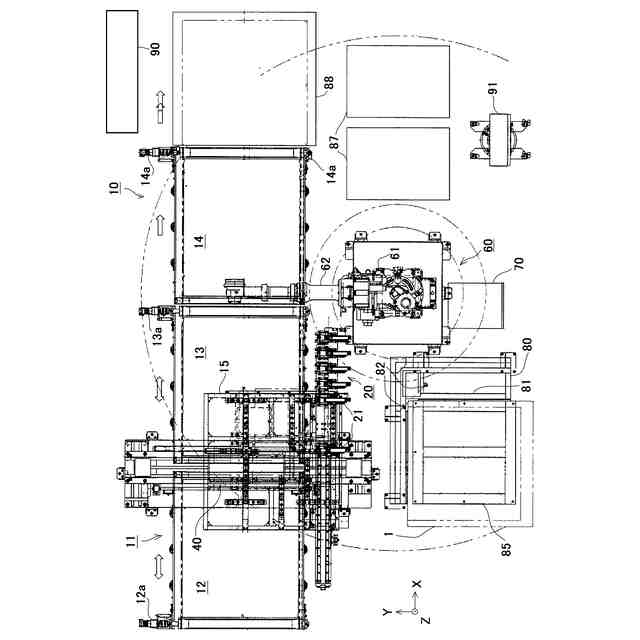
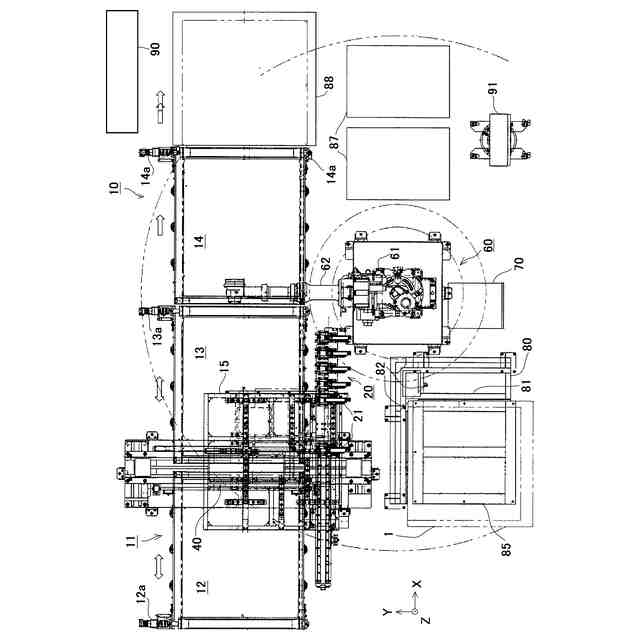
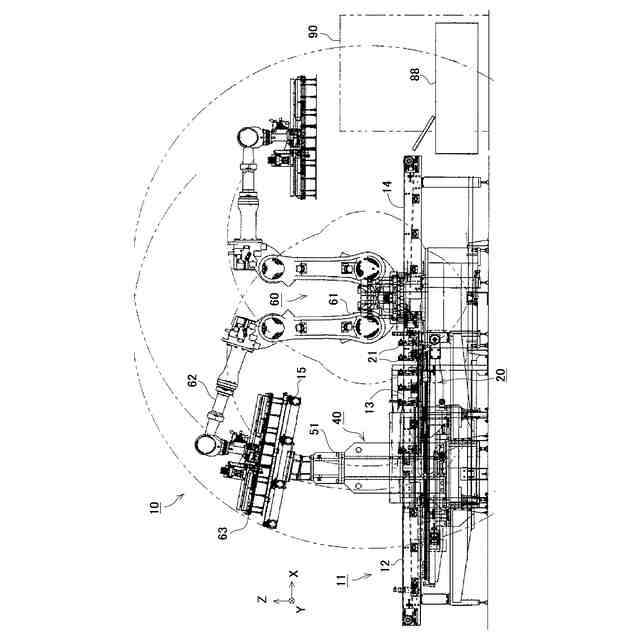
【解決手段】ワーク1を搬送する搬送部11と、搬送部11の上方に配設されたワーク位置決め部15と、搬送部11の長手方向の一側部に配設され、ワーク1に形成された複数の位置決め用孔に挿着される複数のピンユニット21を備え、これらピンユニット21でワーク1を搬送部11の所定位置に位置決めした状態で、搬送部11と同期させながらワーク1を移動させる基準ピン移動部20と、搬送されてくるワーク1の接続部を切断するパンチプレス部40と、ワーク1を所定の供給位置からワーク位置決め部15に移載する第1動作、ワーク位置決め部15から搬送部11の所定位置にワークを移載する第2動作、及び製品を搬送部11から所定の製品回収位置に移載する第3動作を行う移載ロボット60と、これらの動作を制御する制御部70とを装備する。
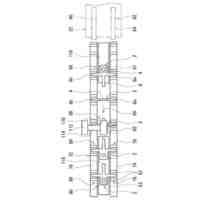
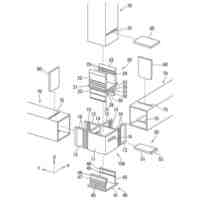
【選択図】図1
特許請求の範囲
【請求項1】
ワークから接続部で接続された製品を分離する製品分離システムであって、
前記ワークを載置して搬送する搬送部と、
該搬送部の上方に配設され、前記搬送部の所定位置に前記ワークを移載するために該ワークの位置決めを行うワーク位置決め部と、
前記搬送部の長手方向の一側部に配設され、前記ワークの一辺部に予め形成された複数の位置決め用孔に挿着される複数のピンユニットを備え、これらピンユニットで前記ワークを前記搬送部の所定位置に位置決めした状態で、前記搬送部と同期させながら前記ワークを移動させる基準ピン移動部と、
搬送されてくる前記ワークの前記接続部を切断するパンチプレス部と、
前記ワークを所定の供給位置から前記ワーク位置決め部に移載する第1動作、前記ワーク位置決め部で位置決めされた前記ワークを前記ワーク位置決め部から前記搬送部の所定位置に移載する第2動作、及び前記ワークから分離された前記製品を前記搬送部から所定の製品回収位置に移載する第3動作を行う移載ロボットと、
これらの動作を制御する制御部と、を備えていることを特徴とする製品分離システム。
続きを表示(約 2,500 文字)
【請求項2】
前記基準ピン移動部が、
前記搬送部の長手方向の一側部に配設され、前記複数のピンユニットが所定の間隔で取り付けられる直動部と、
前記複数のピンユニットを前記直動部に沿って前記搬送部と同期させながら移動させる駆動部とを備え、
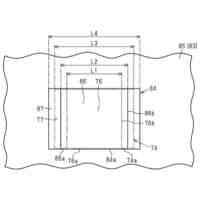
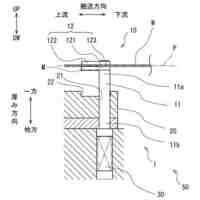
前記複数のピンユニットが、
前記ワークの前記一辺部が載置される載置片と、
該載置片の下方に配置され、該載置片の上に臨む位置まで上下動可能に構成されたピン部と、
前記載置片の上方に配置され、該載置片の上に臨んだ前記ピン部に嵌め合わせるように上下動可能で、かつ前記ワークの前記一辺部に対して直交する方向に進退可能に構成された押え部と、
前記載置片、前記ピン部、及び前記押え部が取り付けられた取付枠を前記ワークの前記一辺部に対して直交する方向に進退移動させる進退移動部とを備えていることを特徴とする請求項1記載の製品分離システム。
【請求項3】
前記制御部が、
前記移載ロボットにより前記第2動作を行う制御と並行して、前記複数のピンユニットで前記ワークを前記搬送部の所定位置で受け取り可能となるように前記基準ピン移動部を制御するように構成されていることを特徴とする請求項1又は請求項2記載の製品分離システム。
【請求項4】
前記制御部が、
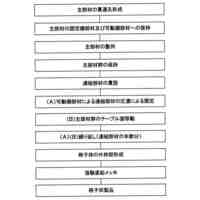
前記搬送部及び前記基準ピン移動部による、前記ワークの搬送動作、及び前記ワークの搬送方向に存在する前記接続部への位置合わせ動作と、
前記パンチプレス部による、前記ワークの幅方向に存在する前記接続部への位置合わせ、及び前記接続部の切断動作と、
前記移載ロボットによる、前記第3動作と、を並行して制御するように構成されていることを特徴とする請求項1記載の製品分離システム。
【請求項5】
前記搬送部が、
第1コンベア、第2コンベア、及び第3コンベアを直列配置した構成を備え、
前記第1コンベア及び前記第2コンベアが正転及び逆転可能に構成されたものであり、
前記第3コンベアが正転可能に構成されたものであり、
前記基準ピン移動部が、
前記第1コンベア及び前記第2コンベアと同期させながら前記ワークを搬送するように構成されたものであり、
前記パンチプレス部が、
前記第1コンベアと前記第2コンベアとの間に配され、
前記ワーク位置決め部が、
前記パンチプレス部の上部に取り付けられ、
前記移載ロボットによる前記第2動作が、
前記ワーク位置決め部で位置決めされた前記ワークの前記複数の位置決め用孔を、前記基準ピン移動部の基準位置に移動させた前記複数のピンユニットに挿し込んで、前記第2コンベアの所定位置に移載する動作であり、
前記第3動作が、
前記ワークから分離された前記製品を前記第3コンベアから所定の製品回収位置に移載する動作であることを特徴とする請求項1記載の製品分離システム。
【請求項6】
前記パンチプレス部が、
前記搬送部における前記ワークの載置面より上に配設されるパンチングヘッド部と、
該パンチングヘッド部を前記ワークの幅方向に移動させるパンチングヘッド移動部と、
前記搬送部における前記ワークの載置面より下に配設されるダイセット部と、
該ダイセット部を前記パンチングヘッド部と同期させながら前記ワークの幅方向に移動させるダイセット移動部とを備え、
前記パンチングヘッド部が、
パンチ部と、該パンチ部を下方に押圧する押圧部と、前記パンチ部を着脱可能に保持する保持部とを備え、
前記ダイセット部が、
前記パンチ部の先端部が嵌め込まれるダイ部と、該ダイ部を着脱可能に保持する保持部と、切断された前記接続部の切り屑を回収する回収部とを備えていることを特徴とする請求項1又は請求項5記載の製品分離システム。
【請求項7】
前記移載ロボットが、
所定の可動範囲を有するアーム部を備えたロボット本体と、
前記アーム部の先端部に取り付けられたロボットハンド部とを備え、
該ロボットハンド部が、
前記ワークを保持するためのワーク保持ユニットと、
前記ワークから分離した前記製品を保持するための製品保持ユニットとを備えていることを特徴とする請求項1記載の製品分離システム。
【請求項8】
前記ワーク保持ユニットが、
前記ワークを保持する複数のワーク保持部と、
所定平面内で前記複数のワーク保持部の位置調整を行う位置調整部とを備え、
前記製品保持ユニットが、
前記製品を検出する製品検出部と、
前記製品を保持する1以上の製品保持部と、
前記所定平面に対して直交方向に前記製品保持部を進退移動させる進退移動部とを備えていることを特徴とする請求項7記載の製品分離システム。
【請求項9】
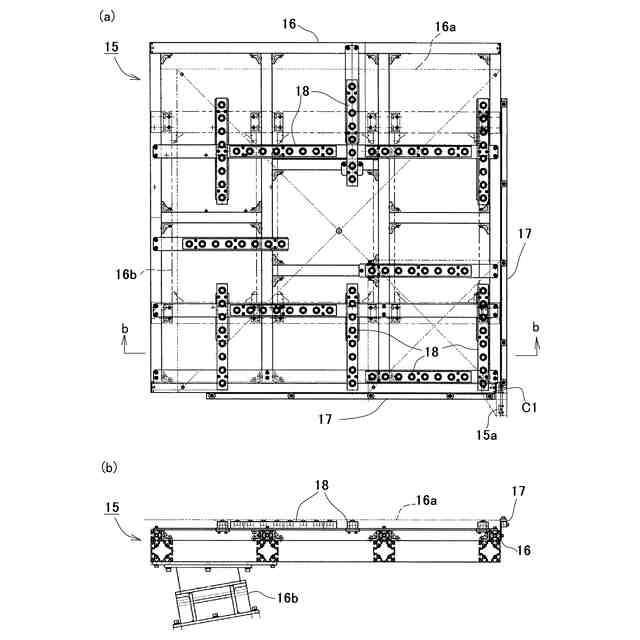
前記ワーク位置決め部が、
略矩形形状を有し、一の角部が他の角部よりも下に位置するように傾斜したワーク載置面を有するワーク載置台を備え、
該ワーク載置台が、
前記一の角部で交わる二辺に設けられた位置決め用ガイドと、
前記ワーク載置面に設けられた滑動部とを備え、
前記ワーク載置面に載置された前記ワークが重力で前記ワーク載置面を滑動して、前記ワークの隣り合う2辺が前記位置決め用ガイドに当接することにより位置決めされるように構成されていることを特徴とする請求項1記載の製品分離システム。
【請求項10】
前記移載ロボットによる前記第3動作が、
前記ワークから分離された複数形状の前記製品を形状別に前記所定の製品回収位置に配置された製品用パレット上に積み重ねる動作であることを特徴とする請求項1記載の製品分離システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
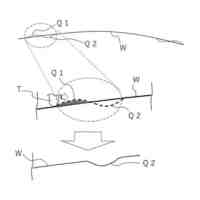
本発明は、ワークにミクロジョイントなどの接続部で接続されている製品を分離するための製品分離システム、該製品分離システムで用いられる移載ロボット、及び搬送装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
金属などの板材から、1個又は複数個の所定の形状の製品を切り出す場合、タレットパンチプレスなどによる打ち抜き加工が行われる。打ち抜き加工の際には、打ち抜き加工の作業効率を高めるために、製品と枠の部分とをミクロジョイントなどの接続部で接続した状態に加工し、後の工程で接続部を切断することにより、製品を分離する方法が採用されることが多い。
前記板材の枠の部分と前記接続部で接続された製品とで構成されたワークから前記製品を切り離す装置として、本出願人は、下記の特許文献1記載の製品分離システムを先に提案した。
【0003】
特許文献1記載の製品分離システムは、ワークから接続部で接続された製品を切り離す装置であって、ワークが載置され、載置された前記ワークが送り込まれるワーク送り込み部と、前記接続部を切断するパンチングユニットと、前記接続部が切断された前記製品を含む前記ワークから前記製品を取り出す製品取り出し部とが順に設けられている。
さらに、当該製品分離システムは、前記ワークの幅方向の一端側を把持する進行方向位置合わせロボット、及び幅方向位置合わせロボットを備えている。
そして、前記ワークの前記ワーク送り込み部から前記製品取り出し部への移動、及び前記ワークの進行方向における切断する前記接続部への位置合わせが、前記進行方向位置合わせロボットにより制御され、前記パンチングユニットの前記ワークの幅方向における切断する前記接続部への移動と位置合わせが、前記幅方向位置合わせロボットにより制御されるように構成されている。
【0004】
[発明が解決しようとする課題]
上記特許文献1記載の製品分離システムでは、前記ワーク送り込み部の側部近傍にワーク供給部が配置され、該ワーク供給部に積層されている前記ワークの一つが、ピックアップロボットにより前記ワーク送り込み部に載置されるようになっている。
前記ワーク供給部では、前記ワークが積層方向に多少のずれを有する状態で積層されていることが多い。そのため、前記ピックアップロボットにより前記ワーク送り込み部に載置された前記ワークの位置に多少のずれが生じることがあった。
そして、前記ワークの位置に多少のずれが生じている状態で、前記進行方向位置合わせロボットにより前記ワークの移動が行われると、切断する前記接続部への前記パンチングユニットの位置合わせが精度良く行えず、前記接続部の切断が精度良く行えない虞があるという課題があった。
【0005】
また、上記特許文献1記載の製品分離システムでは、前記パンチングユニットで前記ワークの全ての前記接続部が切断された後、前記製品取り出し部で前記製品が前記ピックアップロボットにより取り出され、そして、前記製品取り出し部から前記ワークの残部が排出され、その後、次のワークが前記ワーク送り込み部に載置されるようになっている。
そのため、上記特許文献1記載の製品分離システムでは、前記ピックアップロボットによる前記ワークからの前記製品の取り出し動作と前記残部の排出動作が完了するまで、次のワークの接続部の切断動作を行うことができず、装置全体の動作の効率性に関して、改良の余地があるという課題があった。
【0006】
また、上記特許文献1記載の製品分離システムでは、前記ピックアップロボットのアーム先端部にワーク保持部が設けられ、該ワーク保持部に設けられた吸着パッドにより、前記ワークや該ワークから切り離された製品が保持されるように構成されている。
そして、上記特許文献1記載の製品分離システムでは、前記ワークの形状、大きさ、前記製品のワーク内での位置、形状、大きさ、数などを考慮して、適宜適切な前記ワーク保持部を選択、交換して使用することが好ましい構成となっている。
そのため、上記特許文献1記載の前記ピックアップロボットでは、一つのワーク保持部で、形状や大きさなどが異なる様々な種類の前記ワークや製品を保持して移載するには適していないという課題があった。
【先行技術文献】
【特許文献】
【0007】
特許第7144851号公報
【発明の概要】
【発明の概要】
課題を解決するための手段及びその効果
【0008】
本発明は、上記課題に鑑みなされたものであって、その目的の一つは、ミクロジョイントなどの接続部で接続された製品をワークから分離する動作精度を高めることができる製品分離システムを提供することにある。他の目的は、ワークの供給、製品の分離及び回収までの一連の動作を効率よく行うことができる製品分離システムを提供することにある。他の目的は、異なるサイズのワークの供給や様々なサイズ、形状を有する製品の回収を行うことができる、汎用性の高い移載ロボットを提供することにある。さらに、他の目的は、ワークの搬送を精度良く行うことができる搬送装置を提供することにある。
【0009】
上記目的を達成するために、本発明に係る製品分離システム(1)は、
ワークから接続部で接続された製品を分離する製品分離システムであって、
前記ワークを載置して搬送する搬送部と、
該搬送部の上方に配設され、前記搬送部の所定位置に前記ワークを移載するために該ワークの位置決めを行うワーク位置決め部と、
前記搬送部の長手方向の一側部に配設され、前記ワークの一辺部に予め形成された複数の位置決め用孔に挿着される複数のピンユニットを備え、これらピンユニットで前記ワークを前記搬送部の所定位置に位置決めした状態で、前記搬送部と同期させながら前記ワークを移動させる基準ピン移動部と、
搬送されてくる前記ワークの前記接続部を切断するパンチプレス部と、
前記ワークを所定の供給位置から前記ワーク位置決め部に移載する第1動作、前記ワーク位置決め部で位置決めされた前記ワークを前記ワーク位置決め部から前記搬送部の所定位置に移載する第2動作、及び前記ワークから分離された前記製品を前記搬送部から所定の製品回収位置に移載する第3動作を行う移載ロボットと、
これらの動作を制御する制御部と、を備えていることを特徴としている。
【0010】
上記製品分離システム(1)によれば、前記移載ロボットの前記第1動作により、前記ワークが所定の供給位置から前記ワーク位置決め部に移載され、該ワーク位置決め部において、次に行われる前記第2動作の精度を高めるための前記ワークの位置決めが行われる。その後、前記第2動作により、前記ワークが前記ワーク位置決め部から前記搬送部に移載され、該移載時に、前記基準ピン移動部の前記複数のピンユニットにより前記ワークが前記搬送部の所定位置に位置決めされる。そして、該位置決めされた状態から前記基準ピン移動部と前記搬送部との動作を同期させながら前記ワークを搬送し、前記パンチプレス部により前記ワークの前記接続部が切断されていく。その後、前記第3動作により、前記ワークから分離された前記製品が前記搬送部から所定の製品回収位置に移載される。
すなわち、前記ワーク位置決め部と前記基準ピン移動部とによって、前記ワークを前記搬送部の所定位置に精度良く載置することができ、その後、前記基準ピン移動部と前記搬送部との動作を同期させることにより、前記ワークの搬送動作を精度良く行うことができる。そのため、前記ワークに外力を加えない状態で前記ワークを搬送することができ、前記ワークの搬送面(XY平面)での位置ずれを防止することができ、前記ワークの搬送を精度良く行うことができる。また、前記パンチプレス部による前記ワークの前記接続部の切断動作も精度良く行うことができる。これら各部の動作により、前記接続部で接続された前記製品を前記ワークから分離する動作精度を高めることができる。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社プロテリアル
鍛造装置
21日前
個人
ハゼ折鋼板のハゼ締め装置
3か月前
村田機械株式会社
プレス機械
3か月前
株式会社プロテリアル
熱間鍛造用金型
4か月前
トヨタ自動車株式会社
金型装置
21日前
トヨタ自動車株式会社
プレス金型
4か月前
株式会社不二越
NC転造盤
1か月前
トヨタ紡織株式会社
金型装置
4か月前
株式会社ゴーシュー
歯車素材
3か月前
日伸工業株式会社
加工システム
2か月前
石田鉄工株式会社
格子状製品の製造方法
5か月前
日産自動車株式会社
逐次成形方法
3か月前
株式会社カネミツ
筒張出部形成方法
今日
株式会社三明製作所
転造装置
10日前
株式会社プロテリアル
ステンレス鋼帯の製造方法
3か月前
A株式会社
接合部材、及び、骨組み構造体
3か月前
トヨタ自動車株式会社
熱間鍛造用金型
22日前
株式会社カネミツ
歯付円筒体形成方法
6日前
東洋製罐株式会社
有底筒状体加工装置
1か月前
ニデック株式会社
金型及び打ち抜き方法
4か月前
株式会社不二越
転造加工用鋼製平ダイス
2か月前
大同特殊鋼株式会社
横型鍛造装置
3か月前
冨士発條株式会社
トリミング装置
4か月前
株式会社ヤマナカゴーキン
ダイセット装置
3か月前
ダイハツ工業株式会社
曲げ加工装置
5か月前
ダイハツ工業株式会社
曲げ加工装置
5か月前
トヨタ紡織株式会社
モータコアの製造装置
13日前
村田機械株式会社
情報処理装置及び情報処理方法
1か月前
個人
日本刀の製造方法
13日前
ニデック株式会社
金型及びプレス加工装置
4か月前
トヨタ紡織株式会社
カシメ装置
3か月前
村田機械株式会社
金型交換装置及び金型検出方法
3か月前
個人
ハゼ締め装置、およびハゼ締め装置の自動動停止装置
2か月前
浜名部品工業株式会社
軸部材の製造方法及び軸部材
5か月前
アイダエンジニアリング株式会社
板状部材送り装置
21日前
株式会社TMEIC
板離れ防止システム
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ