TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024009681
公報種別
公開特許公報(A)
公開日
2024-01-23
出願番号
2022111380
出願日
2022-07-11
発明の名称
搬送車
出願人
株式会社ダイフク
代理人
弁理士法人R&C
主分類
B61B
13/00 20060101AFI20240116BHJP(鉄道)
要約
【課題】車体の加速又は減速を行う場合に、車輪の滑りを小さく抑えることが可能な搬送車を提供する。
【解決手段】搬送車は、走行方向における互いに異なる位置に配置された第1車輪及び第2車輪を備えた車体と、第1車輪を駆動する第1駆動装置と、第2車輪を駆動する第2駆動装置と、第1駆動装置及び第2駆動装置を制御する制御装置と、を備え、第1駆動装置から第1車輪に伝達されるトルクを第1車輪トルクとし、第2駆動装置から第2車輪に伝達されるトルクを第2車輪トルクとし、第1車輪及び第2車輪のうち、車体の加速又は減速によって鉛直下向きの荷重が増加する方を荷重増加輪として、制御装置は、車体の加速中及び減速中には、第1車輪トルクと第2車輪トルクとの和に対する荷重増加輪に伝達されるトルクの割合である荷重増加輪トルク比Rを、車体の等速走行中に比べて高くするように、第1駆動装置及び第2駆動装置を制御する。
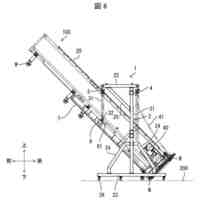
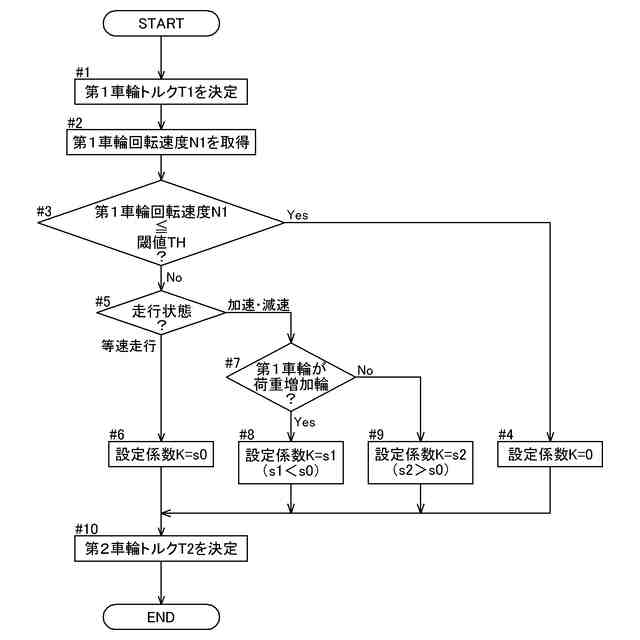
【選択図】図6
特許請求の範囲
【請求項1】
走行レールに沿って走行方向に走行する搬送車であって、
前記走行方向における互いに異なる位置に配置されて前記走行レールの上を転動する第1車輪及び第2車輪を備えた車体と、
前記第1車輪を駆動する第1駆動装置と、
前記第2車輪を駆動する第2駆動装置と、
前記第1駆動装置及び前記第2駆動装置を制御する制御装置と、を備え、
前記第1駆動装置から前記第1車輪に伝達されるトルクを第1車輪トルクとし、前記第2駆動装置から前記第2車輪に伝達されるトルクを第2車輪トルクとし、前記第1車輪及び前記第2車輪のうち、前記車体の加速又は減速によって鉛直下向きの荷重が増加する方を荷重増加輪として、
前記制御装置は、前記車体の加速中及び減速中には、前記第1車輪トルクと前記第2車輪トルクとの和に対する前記荷重増加輪に伝達されるトルクの割合である荷重増加輪トルク比を、前記車体の等速走行中に比べて高くするように、前記第1駆動装置及び前記第2駆動装置を制御する、搬送車。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、前記車体の加速中及び減速中に、前記荷重増加輪と前記走行レールとの間の滑りが前記等速走行中に比べて増加しない範囲内で、前記荷重増加輪トルク比を前記等速走行中に比べて高くする、請求項1に記載の搬送車。
【請求項3】
前記制御装置は、前記車体の加速度の絶対値が大きくなるに従って、前記荷重増加輪トルク比を連続的又は段階的に高くする、請求項1に記載の搬送車。
【請求項4】
前記車体は、搬送対象である物品を保持する保持部を更に備え、
前記保持部に保持された前記物品を含む前記車体の重心が、前記走行レールよりも下側に位置し、
前記車体の加速中は、前記第1車輪及び前記第2車輪のうち、前記走行方向の前側に位置する方が前記荷重増加輪であり、
前記車体の減速中は、前記第1車輪及び前記第2車輪のうち、前記走行方向の後側に位置する方が前記荷重増加輪である、請求項1に記載の搬送車。
【請求項5】
前記制御装置は、前記車体の目標位置及び目標速度の少なくとも一方に基づいて前記第1車輪トルクを決定すると共に、決定した前記第1車輪トルクに対する設定係数の乗算に基づいて前記第2車輪トルクを決定し、
前記制御装置は、
前記等速走行中には、前記設定係数を規定の基準値に設定し、
前記車体の加速中及び減速中には、前記第1車輪が前記荷重増加輪であれば、前記設定係数を前記基準値よりも小さい値に設定し、前記第2車輪が前記荷重増加輪であれば、前記設定係数を前記基準値よりも大きい値に設定する、請求項1から4のいずれか一項に記載の搬送車。
【請求項6】
前記制御装置は、前記第1車輪の回転速度が予め定められた閾値以下の場合には、前記設定係数をゼロに設定する、請求項5に記載の搬送車。
【請求項7】
前記制御装置は、前記第1車輪トルクを変化させる場合において、前記第1車輪トルクの変化期間と、前記設定係数の変化期間とを一致させる、請求項5に記載の搬送車。
【請求項8】
前記制御装置は、前記第1車輪トルクを変化させる場合において、前記第1車輪トルクの変化を、予め定められた設定期間における移動平均により平滑化すると共に、前記設定係数の変化を、前記設定期間と同じ長さの期間における移動平均により平滑化する、請求項7に記載の搬送車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、走行レールに沿って走行する搬送車に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
このような搬送車の一例が、下記の特許文献1に開示されている。以下、背景技術の説明では、特許文献1における符号を括弧内に引用する。
【0003】
特許文献1の搬送車(3)は、走行方向における互いに異なる位置に配置されて走行レール(4)の上を転動する第1車輪(25,28)及び第2車輪(36,37)を備えた車体(18,19)と、第1車輪(25,28)を駆動する駆動装置(26,29)と、当該駆動装置を制御する制御装置(59)と、を備えている。制御装置(59)は、車体(18,19)の目標位置に基づいて速度パターン(特許文献1の図5参照)を生成させ、当該速度パターンに従って駆動装置(26,29)を制御する。
【先行技術文献】
【特許文献】
【0004】
特開2010-282569号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、車体(18,19)が加速又は減速する場合、第1車輪(25,28)及び第2車輪(36,37)のいずれか一方の鉛直下向きの荷重が増加し、他方の鉛直下向きの荷重が減少する。その結果、車輪の滑りが大きくなり、粉塵の発生要因となる場合があった。
【0006】
そこで、車体の加速又は減速を行う場合に、車輪の滑りを小さく抑えることが可能な搬送車の実現が望まれる。
【課題を解決するための手段】
【0007】
上記に鑑みた、搬送車の特徴構成は、
走行レールに沿って走行方向に走行する搬送車であって、
前記走行方向における互いに異なる位置に配置されて前記走行レールの上を転動する第1車輪及び第2車輪を備えた車体と、
前記第1車輪を駆動する第1駆動装置と、
前記第2車輪を駆動する第2駆動装置と、
前記第1駆動装置及び前記第2駆動装置を制御する制御装置と、を備え、
前記第1駆動装置から前記第1車輪に伝達されるトルクを第1車輪トルクとし、前記第2駆動装置から前記第2車輪に伝達されるトルクを第2車輪トルクとし、前記第1車輪及び前記第2車輪のうち、前記車体の加速又は減速によって鉛直下向きの荷重が増加する方を荷重増加輪として、
前記制御装置は、前記車体の加速中及び減速中には、前記第1車輪トルクと前記第2車輪トルクとの和に対する前記荷重増加輪に伝達されるトルクの割合である荷重増加輪トルク比を、前記車体の等速走行中に比べて高くするように、前記第1駆動装置及び前記第2駆動装置を制御する点にある。
【0008】
この特徴構成によれば、車体の加速中又は減速中における第1車輪及び第2車輪に作用する鉛直下向きの荷重の増減に応じて、第1車輪トルク及び第2車輪トルクを適切に制御することができる。これにより、車体の加速又は減速を行う場合に、車輪の滑りを少なく抑え易い。また、車体の加速又は減速を大きな速度変化で行い易いため、物品の搬送効率を高め易い。
【図面の簡単な説明】
【0009】
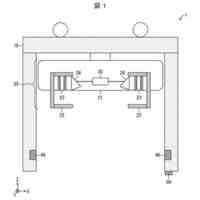
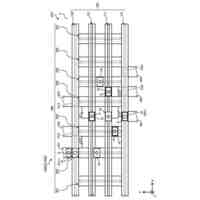
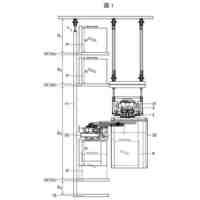
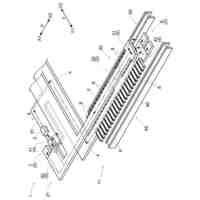
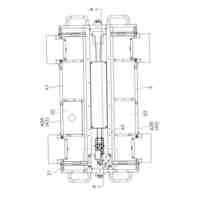
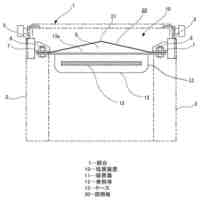
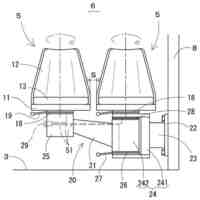
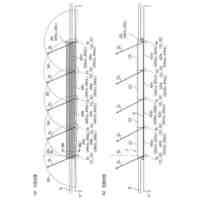
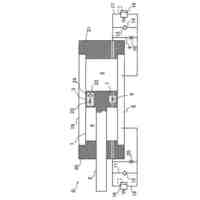
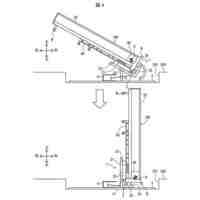
実施形態に係る搬送車の斜視図
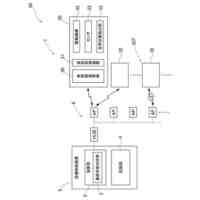
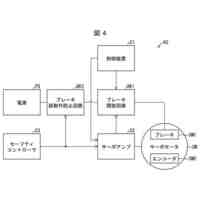
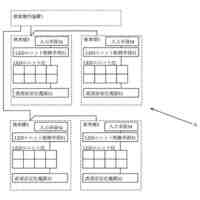
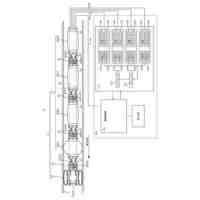
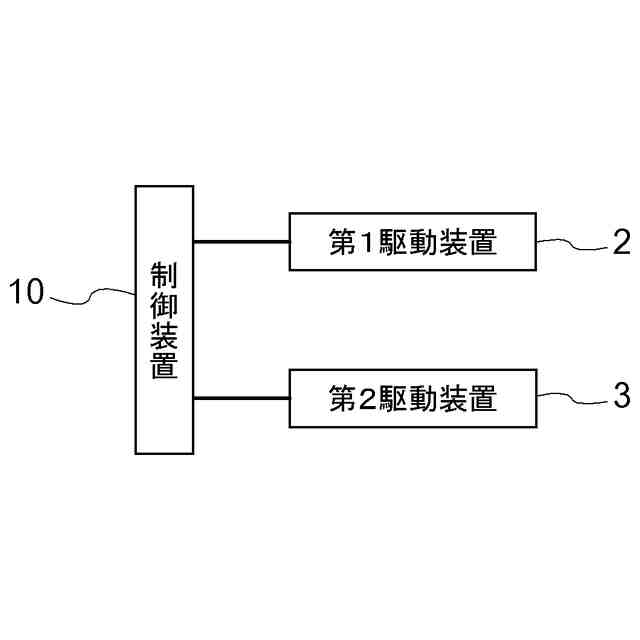
実施形態に係る搬送車の制御ブロック図
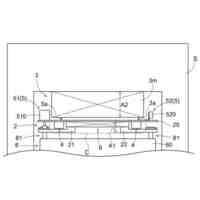
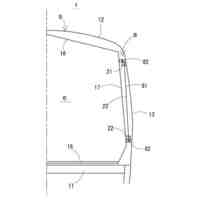
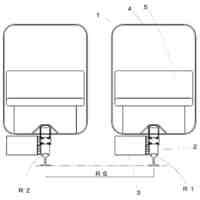
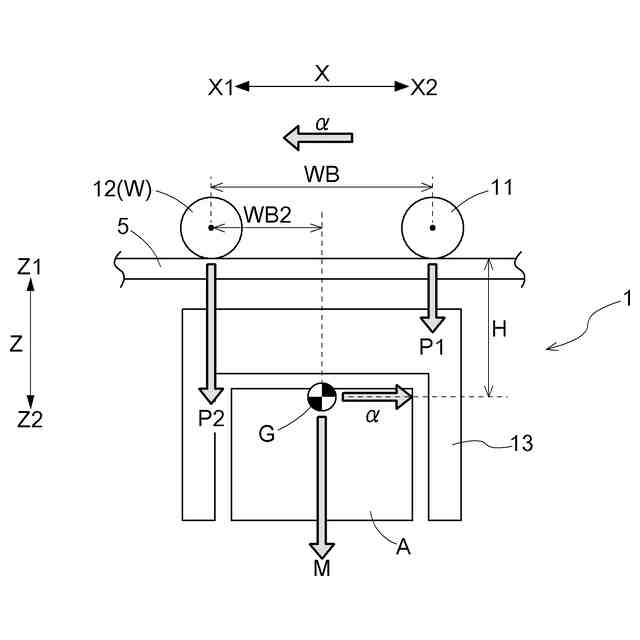
実施形態に係る搬送車の車体が加速する様子を示す概略図
実施形態に係る搬送車の車体が減速する様子を示す概略図
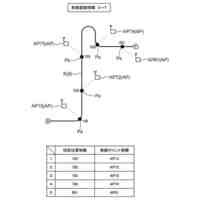
制御装置による制御処理の一例を示すフローチャート
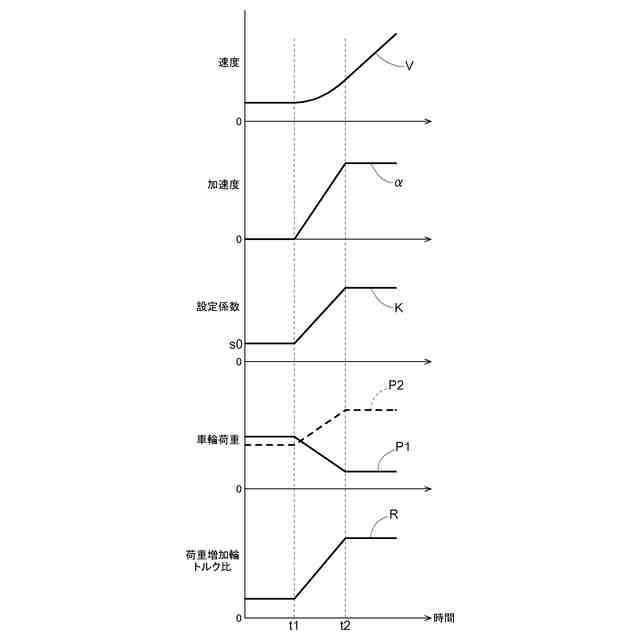
車体を等速走行状態から加速させる場合における制御装置による制御処理の一例を示すタイムチャート
車体を等速走行状態から減速させる場合における制御装置による制御処理の一例を示すタイムチャート
【発明を実施するための形態】
【0010】
以下では、実施形態に係る搬送車100について、図面を参照して説明する。図1に示すように、搬送車100は、走行レール5に沿って走行するように構成されている。本実施形態では、搬送車100は、天井から吊り下げられた状態で支持された走行レール5に沿って走行する天井搬送車である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイフク
載置台
24日前
株式会社ダイフク
搬送車
1か月前
株式会社ダイフク
昇降装置
18日前
株式会社ダイフク
天井搬送車
3日前
株式会社ダイフク
クランプ装置
16日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
3日前
株式会社ダイフク
物品搬送設備
26日前
株式会社ダイフク
走行規制装置
18日前
株式会社ダイフク
搬送システム
16日前
株式会社ダイフク
車両制御システム
16日前
株式会社ダイフク
搬送車及び搬送設備
1か月前
株式会社ダイフク
天井保管棚、および搬送システム
24日前
株式会社ダイフク
昇降システム、及びスタッカクレーン
2日前
株式会社ダイフク
洗車機
11日前
株式会社ダイフク
物品仕分け設備
3日前
株式会社ダイフク
スタッカークレーンの建て起こし装置、及びスタッカークレーンの建て起こし方法
16日前
株式会社ダイフク
スタッカークレーンの建て起こし装置、及びスタッカークレーンの建て起こし方法
16日前
個人
コンテナ輸送システム
3か月前
個人
鉄道車両の脱線防止の構造
9か月前
東光産業株式会社
電動台車
4か月前
コイト電工株式会社
暖房装置
3か月前
コイト電工株式会社
座席装置
5か月前
株式会社新陽社
発車標
2か月前
コイト電工株式会社
暖房装置
3か月前
日本車輌製造株式会社
鉄道車両
2か月前
日本車輌製造株式会社
鉄道車両
3か月前
個人
車両間乗降システム
8か月前
日本信号株式会社
地上子
9か月前
富士電機株式会社
戸閉装置
6か月前
株式会社ソラリス
管内検査ロボット
10か月前
オムロン株式会社
転落検知システム
7か月前
株式会社ロッソ
移動体案内システム
6か月前
カヤバ株式会社
鉄道車両用制振装置
3か月前
株式会社 空スペース
跨座式モノレール車両
8か月前
コイト電工株式会社
カメラ設置ケース
10か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ