TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024157983
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072707
出願日
2023-04-26
発明の名称
クランプ装置
出願人
株式会社ダイフク
代理人
弁理士法人 HARAKENZO WORLD PATENT & TRADEMARK
主分類
B25J
15/08 20060101AFI20241031BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】クランプ力が掛かりすぎた場合にアクチュエータを保護する。
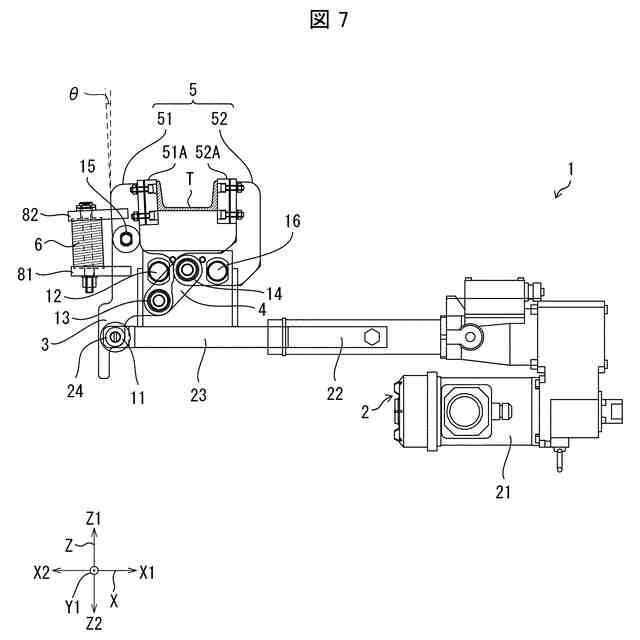
【解決手段】クランプ装置(1)は、アクチュエータ(2)の伸縮動作に連動する基部(3)と、第1把持部(51)が基部(3)に対して回動可能に取り付けられた一対の把持部(5)と、第1把持部(51)が対象物(T)から受ける反力が所定値以上となった場合に弾性変形して、基部(3)に対する第1把持部(51)の回動を許容する弾性部材(6)と、を備える。
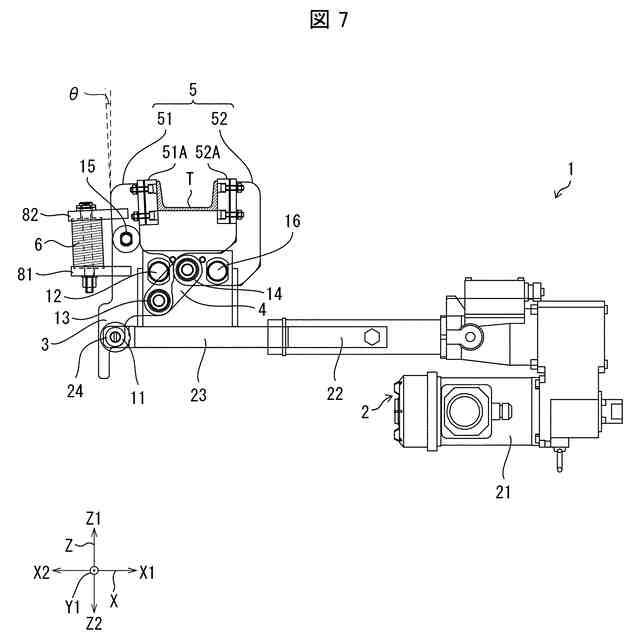
【選択図】図7
特許請求の範囲
【請求項1】
対象物を把持する把持状態と前記対象物を解放する解放状態とに切り替え可能なクランプ装置であって、
アクチュエータと、
前記アクチュエータの伸縮動作に連動する基部と、
前記把持状態において前記対象物を把持する一対の把持部であって、該一対の把持部のうちの一方の把持部が前記基部に対して回動可能に取り付けられた一対の把持部と、
前記把持状態において前記一方の把持部が前記対象物から受ける反力が所定値以上となった場合に弾性変形して、前記基部に対する前記一方の把持部の回動を許容する弾性部材と、
を備えるクランプ装置。
続きを表示(約 760 文字)
【請求項2】
前記弾性部材は、前記基部と前記一方の把持部との間に配置され、前記反力が所定値以上となった場合に収縮するようになっている請求項1に記載のクランプ装置。
【請求項3】
前記アクチュエータは、電動アクチュエータである請求項1または2に記載のクランプ装置。
【請求項4】
前記所定値は、前記把持状態において前記電動アクチュエータに搭載される電動機に加わる負荷が、該電動機の定格トルクを超えないように設定される請求項3に記載のクランプ装置。
【請求項5】
前記弾性部材は、圧縮コイルばねである請求項1または2に記載のクランプ装置。
【請求項6】
前記圧縮コイルばねに貫設される支持軸と、
前記支持軸と前記一方の把持部との接続部分に設けられ、前記支持軸を通す貫通孔を有する座金と、をさらに備え、
前記座金は、球面状の凸面を有する凸状座金と、前記凸面に対応した球面状の凹面を有する凹状座金とを含み、前記凹面に対して前記凸面が摺動可能になっている請求項5に記載のクランプ装置。
【請求項7】
前記基部に接続されたリンクプレートをさらに備え、
前記一対の把持部のうちの他方の把持部は、前記リンクプレートに回動可能に取り付けられ、
前記アクチュエータの伸縮動作に連動して、前記一方の把持部及び前記他方の把持部の各々が互いに逆向きに回動する請求項1または2に記載のクランプ装置。
【請求項8】
前記アクチュエータ及び前記基部が取り付けられるフレームと、
前記フレームに先端部を押し当てて、前記フレームを位置決めするねじ部材と、をさらに備える請求項1または2に記載のクランプ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を把持するクランプ装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、シリンダの伸縮動作に応じて、対象物を把持するクランプ装置(把持装置)が知られている。この種の技術に関し、特許文献1には、シリンダ、一対の把持部材本体、リンク部材及びコイルばねを備えた把持装置が開示されている。特許文献1に記載の把持装置では、シリンダと把持部材本体とを連結するリンク部材にコイルばねが接続され、該コイルばねが対象物から受ける反力により弾性変形することにより、対象物に対する把持部材本体の接触圧の微細な調整を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2010-265089号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、何らかの原因でクランプ力が掛かりすぎた場合にシリンダを保護することができないという課題があった。
【0005】
本開示の一態様は、前記従来の課題に鑑みてなされたものであって、クランプ力が掛かりすぎた場合にシリンダ等のアクチュエータを保護し得るクランプ装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
前記課題を解決するために、本発明の一態様に係るクランプ装置は、対象物を把持する把持状態と前記対象物を解放する解放状態とに切り替え可能なクランプ装置であって、アクチュエータと、前記アクチュエータの伸縮動作に連動する基部と、前記把持状態において前記対象物を把持する一対の把持部であって、該一対の把持部のうちの一方の把持部が前記基部に対して回動可能に取り付けられた一対の把持部と、前記把持状態において前記一方の把持部が前記対象物から受ける反力が所定値以上となった場合に弾性変形して、前記基部に対する前記一方の把持部の回動を許容する弾性部材と、を備える。
【発明の効果】
【0007】
本発明の一態様によれば、クランプ力が掛かりすぎた場合にアクチュエータを保護し得るクランプ装置を提供することができる。
【図面の簡単な説明】
【0008】
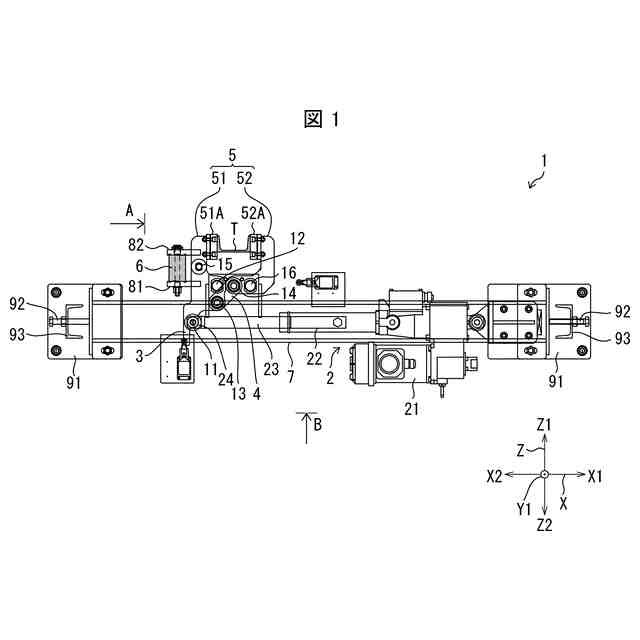
本発明の実施形態に係るクランプ装置の構成を示す概略側面図である。
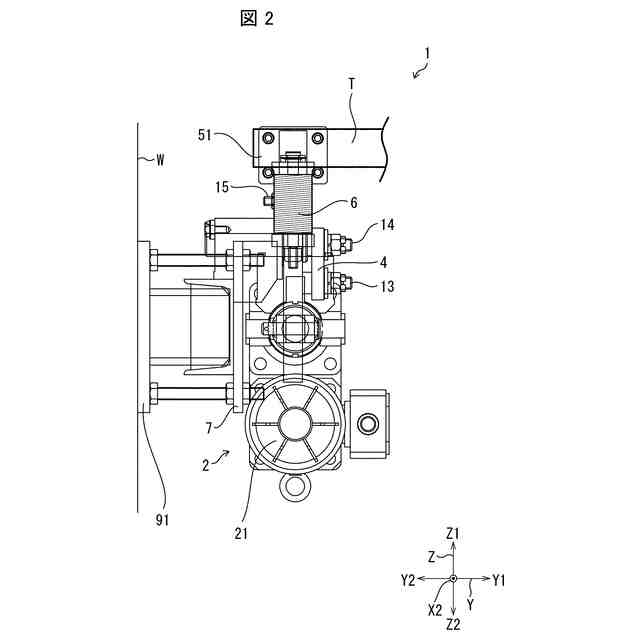
図1に示されるクランプ装置のA矢視図である。
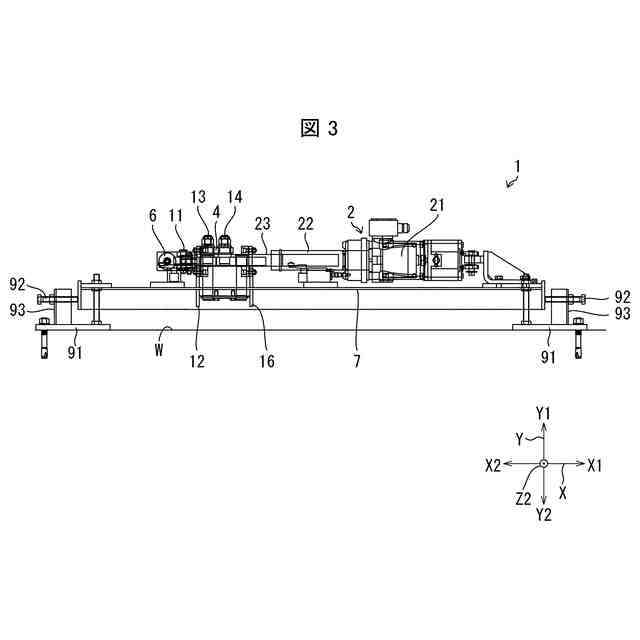
図1に示されるクランプ装置のB矢視図である。
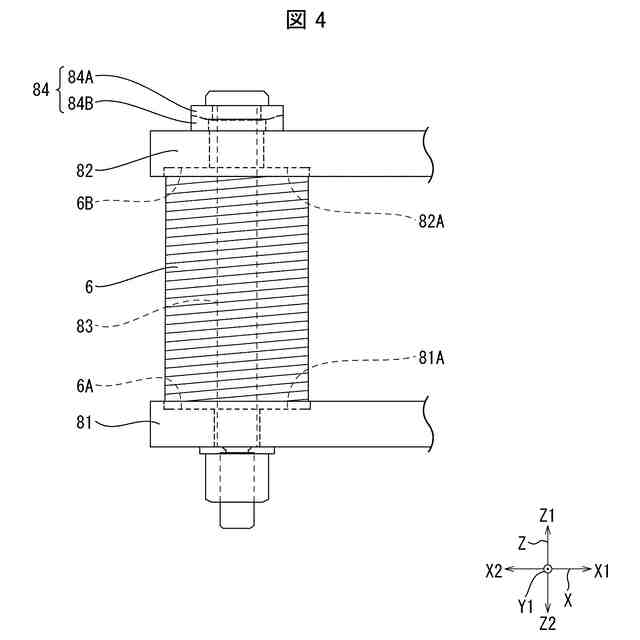
図1に示されるクランプ装置が備える弾性部材の取り付け構造を示す拡大図である。
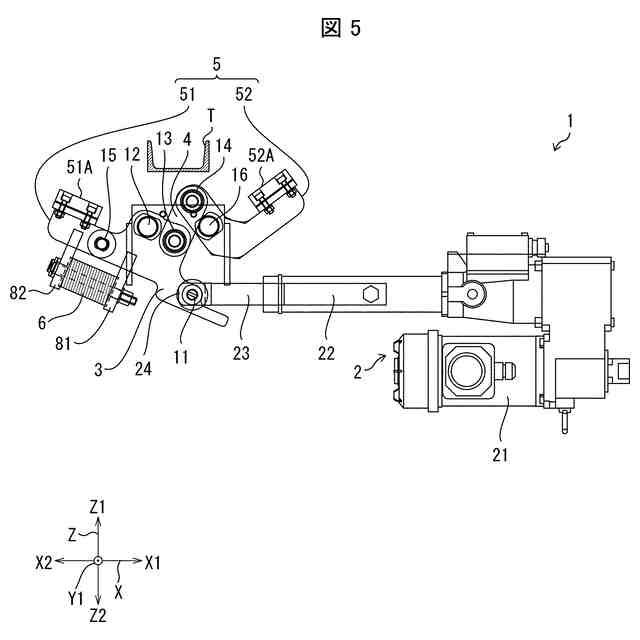
前記クランプ装置の解放状態を示す概略側面図である。
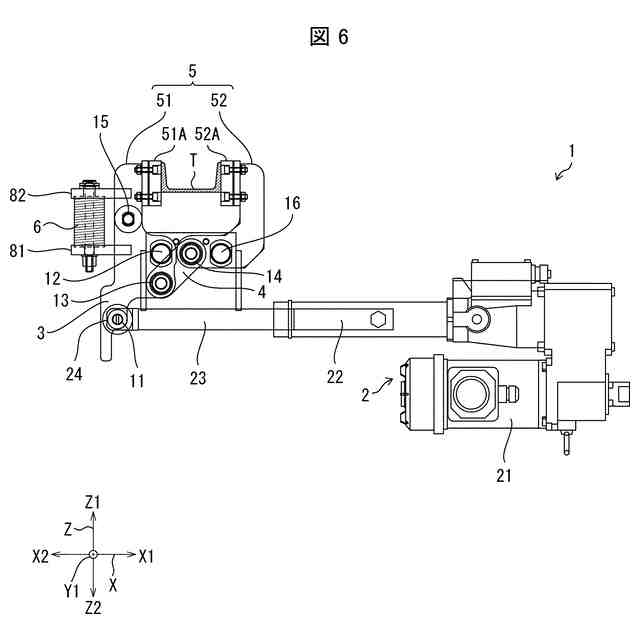
前記クランプ装置の把持状態を示す概略側面図である。
前記クランプ装置のクランプ異常状態を示す概略側面図である。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について、図1~図7に基づいて説明する。なお、以下の説明は本発明に係るクランプ装置の例示であり、本発明の技術的範囲は図示例に限定されるものではない。
【0010】
[クランプ装置1の概要]
まず、図1から図3を参照して、本実施形態に係るクランプ装置1の概要を説明する。図1は、本実施形態に係るクランプ装置1の構成例を示す概略側面図である。図2は、図1に示されるクランプ装置1のA矢視図である。図3は、図1に示されるクランプ装置1のB矢視図である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
2か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
4か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
学校法人立命館
グリッパ
2か月前
CKD株式会社
把持装置
2か月前
オムロン株式会社
電動把持工具
2か月前
トヨタ自動車株式会社
ロボット
3か月前
東京計器株式会社
接触検知装置
3か月前
株式会社マキタ
打撃工具
11日前
白山工業株式会社
ロボットアーム
2か月前
株式会社マキタ
電動ハンマ
25日前
株式会社ハーモ
開閉チャック装置
3か月前
株式会社ダイヘン
制御装置
19日前
個人
回転工具およびバリ取り部品
3か月前
株式会社エビス
携帯付属物取付具
11日前
個人
容器引っ掛け棒およびその使用方法
4か月前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社ダイヘン
搬送装置
11日前
株式会社ダイヘン
搬送装置
1か月前
SMC株式会社
グリッパ
1か月前
株式会社日本キャリア工業
ロボットハンド
4か月前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
締付判定方法
3か月前
株式会社大林組
ロッカー装置
3か月前
株式会社スター精機
把持装置
2か月前
国立大学法人佐賀大学
協働システム
2か月前
川崎重工業株式会社
ロボット
19日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ