TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024125013
公報種別
公開特許公報(A)
公開日
2024-09-13
出願番号
2023033067
出願日
2023-03-03
発明の名称
電動把持工具
出願人
オムロン株式会社
代理人
個人
主分類
B25F
5/00 20060101AFI20240906BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】本体部に補助ハンドルが装着された状態での作業時において、作業者の安全性をさらに向上させることが可能な電動把持工具を提供する。
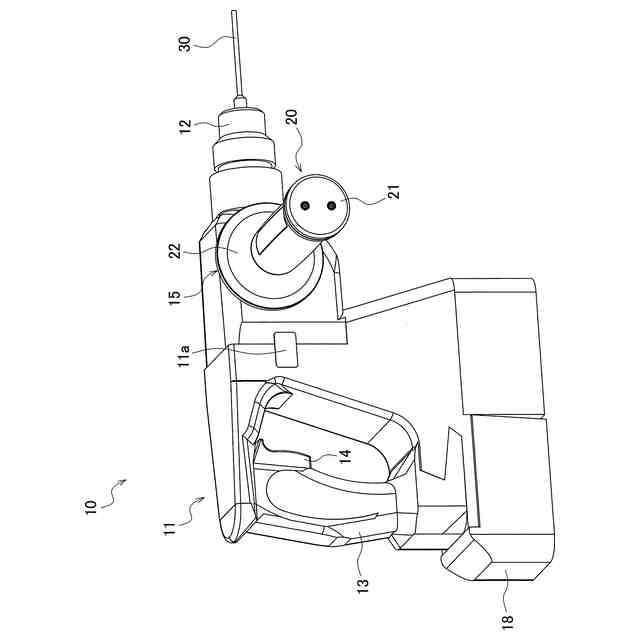
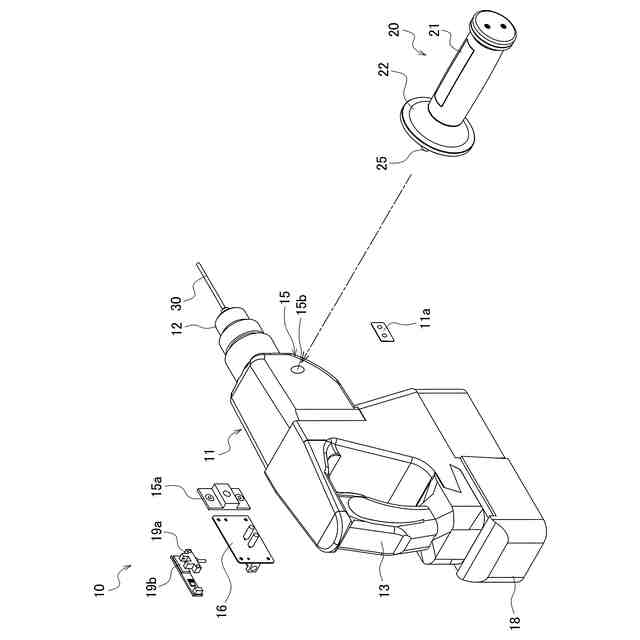
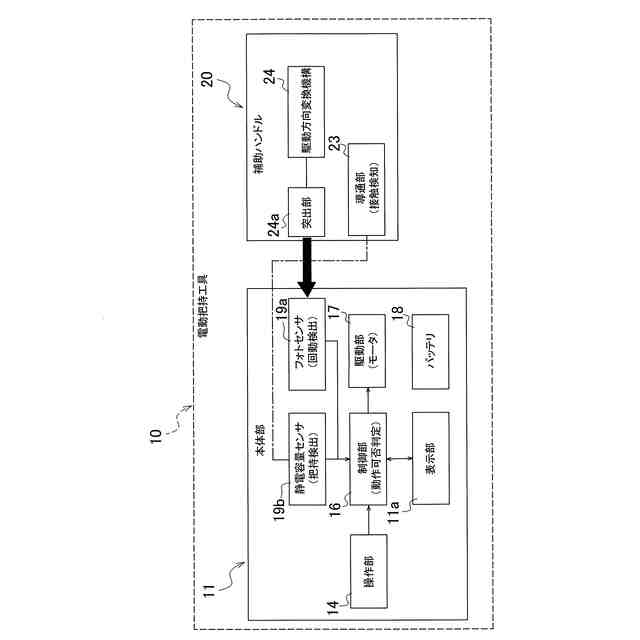
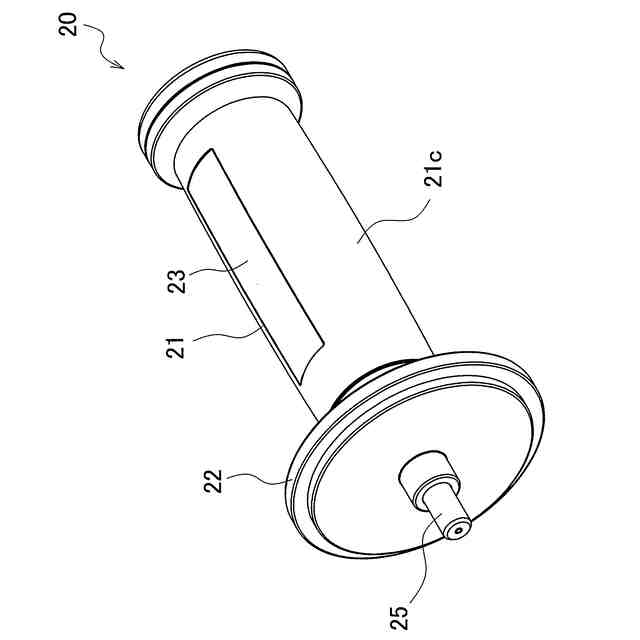
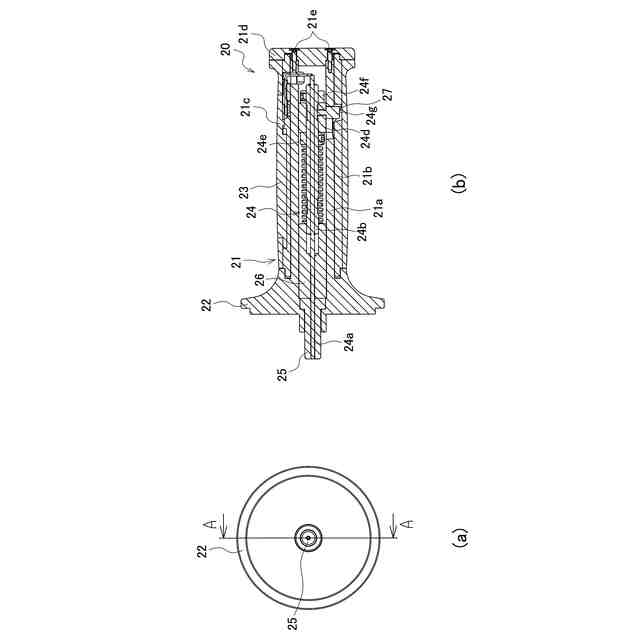
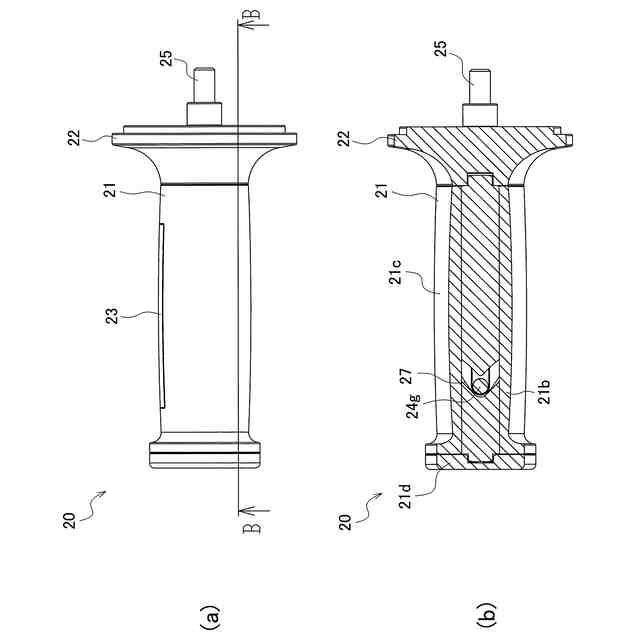
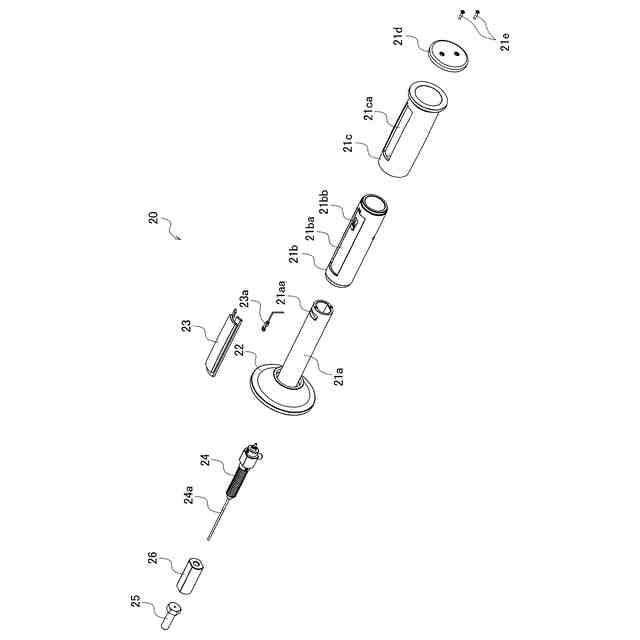
【解決手段】電動把持工具10は、本体部11、本体部11に対して着脱可能に取り付けられ作業時に使用者によって把持される補助ハンドル20を備える。補助ハンドル20は、回転体21b、駆動方向変換機構24を有する。駆動方向変換機構24は、回転体21bに所定操作が入力されると、所定操作の入力方向とは異なる方向に突出部24aを駆動させる。本体部11は、駆動部17、操作部14、フォトセンサ19a、制御部16を有する。フォトセンサ19aは、回転体21bへの使用者による所定操作の有無を、突出部24aを検出することによって検出する。制御部16は、フォトセンサ19aにおける検出結果に基づいて操作部14の操作による駆動部17の駆動を許可するか否かを判定する。
【選択図】図3
特許請求の範囲
【請求項1】
装着された先端工具を駆動させて所定の作業を行う電動把持工具であって、
本体部と、
前記本体部に対して着脱可能な状態で取り付けられており、作業時に使用者によって把持される補助ハンドルと、
を備え、
前記補助ハンドルは、
前記使用者による前記補助ハンドルへの所定操作が入力される操作入力部と、
前記操作入力部に前記所定操作が入力されると駆動される被検出部を有し、前記所定操作の入力方向とは異なる方向に前記被検出部を駆動させる駆動方向変換機構と、
を有しており、
前記本体部は、
前記先端工具を駆動する駆動部と、
前記使用者によって操作され前記駆動部を駆動させるトリガスイッチと、
前記操作入力部への前記使用者による所定操作の有無を、前記被検出部を検出することによって検出する操作検出部と、
前記操作検出部における検出結果に基づいて、前記トリガスイッチの操作による前記駆動部の駆動を許可するか否かを判定する制御部と、
を有している、
電動把持工具。
続きを表示(約 940 文字)
【請求項2】
前記補助ハンドルは、前記使用者による前記補助ハンドルへの接触が入力される把持入力部を、さらに有しており、
前記本体部は、前記把持入力部への前記使用者の接触の有無を検出する把持検出部を、さらに有している、
請求項1に記載の電動把持工具。
【請求項3】
前記制御部は、前記把持検出部における検出結果と、前記操作検出部における検出結果とに基づいて、前記駆動部の駆動を許可するか否かを判定する、
請求項2に記載の電動把持工具。
【請求項4】
前記所定操作は、前記補助ハンドルの把持部分を回動させる操作を含む、
請求項1に記載の電動把持工具。
【請求項5】
前記所定操作は、前記補助ハンドルに設けられたレバー部分を押す操作を含む、
請求項1に記載の電動把持工具。
【請求項6】
前記所定操作は、前記補助ハンドルに設けられたボタン部分を押す操作を含む、
請求項1に記載の電動把持工具。
【請求項7】
前記補助ハンドルは、前記把持入力部として、前記把持検出部に電気的に接続される電極部を有し、
前記駆動方向変換機構が、前記操作入力部への前記所定操作の入力によって前記被検出部を機械的に駆動する、
請求項2に記載の電動把持工具。
【請求項8】
前記被検出部は、前記所定操作に伴って前記本体部の側における所定の突出位置へ突出する突出部を含む、
請求項1または2に記載の電動把持工具。
【請求項9】
前記補助ハンドルは、前記使用者による前記補助ハンドルへの前記所定操作の入力が終了すると、前記被検出部を突出位置から初期位置へ戻すように、前記被検出部に対して付勢力を付与する付勢部材を、さらに有している、
請求項1または2に記載の電動把持工具。
【請求項10】
前記補助ハンドルは、前記操作入力部として、溝部と、前記所定操作が入力されると前記溝部の傾斜面に沿って移動するピンと、を有している、
請求項1または2に記載の電動把持工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、電動ドライバ、グラインダ、ジグソー、チェーンソー等の電力あるいはエアによって先端工具を駆動させて各種作業を行う電動把持工具に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
作業現場や工場において、ドリルやドライバなどの先端工具をモータによって回転駆動して所望の作業を行う電動把持工具が広く用いられている(例えば、特許文献1参照)。
このような電動把持工具の中には、使用者が安定した状態で電動把持工具を使用できるように、本体部に補助ハンドルが装着された電動把持工具がある。
例えば、特許文献1には、補助ハンドル仕様時における利便性を向上させるために、ギヤを収容するギヤケースから前方に突出し、先端工具が取り付けられた状態でモータの回転力により回転する出力軸と、補助ハンドルが装着された状態で補助ハンドルに設けられている慣性センサの検出信号を受信する受信装置と、慣性センサの検出信号に基づいて出力軸の回転を制御する制御信号を出力するコントローラと、を備えた電動工具について開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-151692号公報
特開2012-096299号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来の電動工具では、以下に示すような問題点を有している。
すなわち、上記公報に開示された電動工具では、ハンドル部と作業者の手との距離データに基づいてハンドル部が作業者に握られたか否かを判定することで、作業者がハンドル部に触っているものと推定された際に、出力軸の回転を許可しているため、作業者がハンドル部をしっかりと握っているか否かまで判断することは困難であった。このため、作業者がしっかりハンドル部を握っていない状態のまま作業を行っているにもかかわらず、出力軸の回転を許可してしまい、電動工具が大きな反力を受けた際に作業者の安全性が十分な担保されていないおそれがある。
【0005】
本発明の課題は、本体部に補助ハンドルが装着された状態での作業時において、作業者の安全性をさらに向上させることが可能な電動把持工具を提供することにある。
【課題を解決するための手段】
【0006】
第1の発明に係る電動把持工具は、装着された先端工具を駆動させて所定の作業を行う電動把持工具であって、本体部と、本体部に対して着脱可能な状態で取り付けられており、作業時に使用者によって把持される補助ハンドルと、を備えている。補助ハンドルは、操作入力部と、駆動方向変換機構と、を有している。操作入力部は、使用者による補助ハンドルへの所定操作が入力される。駆動方向変換機構は、操作入力部に所定操作が入力されると駆動される被検出部を有し、所定操作の入力方向とは異なる方向に被検出部を駆動させる。本体部は、先端工具を駆動する駆動部と、トリガスイッチと、操作検出部と、制御部と、を有している。トリガスイッチは、使用者によって操作され駆動部を駆動させる。操作検出部は、操作入力部への使用者による所定操作の有無を、被検出部を検出することによって検出する。制御部は、操作検出部における検出結果に基づいて、トリガスイッチの操作による駆動部の駆動を許可するか否かを判定する。
【0007】
ここでは、補助ハンドルが本体部に装着された状態で使用される電動把持工具において、本体部のトリガスイッチが操作された際に駆動部の駆動を許可するか否かを、補助ハンドルへの使用者の所定操作の入力を条件として判定する。
このとき、所定操作の入力方向は、操作検出部において検出される被検出部を駆動させる方向とは異なる。すなわち、所定操作の有無を検出するための被検出部の検出は、使用者による所定操作の入力方向とは異なる方向に駆動される被検出部を、操作検出部が検出することによって行われる。
【0008】
ここで、操作ハンドルへの所定操作には、例えば、補助ハンドルの把持部分の回動操作、補助ハンドルに設けられたレバー操作、補助ハンドルに設けられたボタン操作等が含まれる。
これにより、制御部は、補助ハンドルに対して所定操作を行っていることを、所定操作とは異なる方向に駆動される被検出部の検出を条件に、駆動部の駆動を許可することで、作業者が補助ハンドルをしっかり握っていると推定される状態を確認した上で、駆動部の駆動を許可することができる。
この結果、本体部に補助ハンドルが装着された状態での作業時において、作業者の安全性をさらに向上させることができる。
【0009】
第2の発明に係る電動把持工具は、第1の発明に係る電動把持工具であって、補助ハンドルは、使用者による補助ハンドルへの接触が入力される把持入力部を、さらに有している。本体部は、把持入力部への使用者の接触の有無を検出する把持検出部を、さらに有している。
これにより、補助ハンドルに対して所定操作を行っていることに加えて、補助ハンドルを使用者が触っていることを検出することができる。よって、作業者が補助ハンドルをしっかり握っていると推定される状態を確認した上で、駆動部の駆動を許可することができる。
【0010】
第3の発明に係る電動把持工具は、第2の発明に係る電動把持工具であって、制御部は、把持検出部における検出結果と、操作検出部における検出結果とに基づいて、駆動部の駆動を許可するか否かを判定する。
これにより、制御部は、補助ハンドルに対して所定操作を行っていることに加えて、補助ハンドルを使用者が触っていることを条件に、駆動部の駆動を許可することで、作業者が補助ハンドルをしっかり握っていると推定される状態を確認した上で、駆動部の駆動を許可することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
腰袋
26日前
株式会社マキタ
電動工具
19日前
株式会社マキタ
電動工具
1か月前
国立大学法人金沢大学
ロボット
5日前
川崎重工業株式会社
ロボットリスト
1か月前
日本車輌製造株式会社
締め付け工具
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
川崎重工業株式会社
ロボットアーム
1か月前
株式会社ケー・エフ・シー
締結構造
9日前
CKD株式会社
吸着型搬送装置
1か月前
日本信号株式会社
作業機制御システム
19日前
川崎重工業株式会社
ロボットシステム
1か月前
株式会社安川電機
ロボット
1か月前
株式会社京阪エンジニアリング
脱着装置
20日前
ジヤトコ株式会社
圧入装置
1か月前
株式会社スター精機
ワーク搬送装置
23日前
株式会社マキタ
集塵アタッチメント
19日前
トヨタ自動車株式会社
把持装置、把持方法
13日前
アピュアン株式会社
衝撃工具
今日
モトコマ株式会社
寄せポンチホルダー
1か月前
川崎重工業株式会社
ロボットシステム
26日前
株式会社コスメック
把持装置
6日前
トヨタ自動車株式会社
制御装置及び制御方法
1か月前
国立大学法人 東京大学
ロボットアーム
6日前
有限会社松尾エンジニアリング
連結部材
1か月前
株式会社DailyColor
ロボットハンド
1か月前
株式会社ダイヘン
ロボット制御システム
9日前
個人
ターンバックル用工具
1か月前
株式会社不二越
ロボットビジョンシステム
12日前
株式会社SHIN‐JIGEN
上肢アシスト装置
1か月前
原利興工業有限公司
工具用スリーブ
5日前
株式会社マキタ
作業機
5日前
株式会社マキタ
電動工具
26日前
株式会社マキタ
作業機
5日前
株式会社マキタ
作業機
5日前
株式会社マキタ
作業機
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ