TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025008997
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023111679
出願日
2023-07-06
発明の名称
ロボット
出願人
株式会社安川電機
代理人
個人
,
個人
,
個人
主分類
B25J
9/06 20060101AFI20250109BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数段のハンドの駆動系の小型化及び剛性の両立に有効なロボットを提供する。
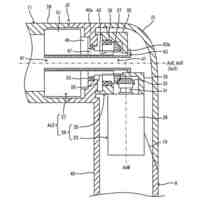
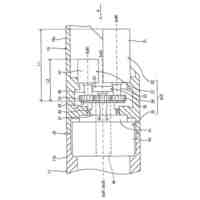
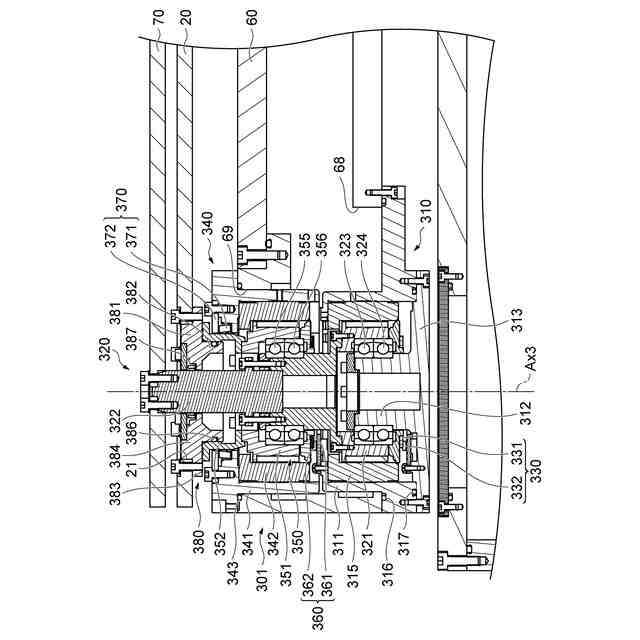
【解決手段】ロボットは、第1ハンド20と、第2ハンド70とを互いに独立して回転させるハンドモータ301を有し、ハンドモータ301は、第1ハンド20に固定される第1出力軸350と、ハンド軸線Ax3まわりの回転磁界を第1出力軸350に作用させる第1ステータ342と、第1出力軸350を貫通して第2ハンド70に固定される第2出力軸320と、ハンド軸線Ax3まわりの回転磁界を第2出力軸320に作用させる第2ステータ315と、リンクに保持され第1出力軸350又は第2出力軸320を保持する第1軸受け323,324と、第2出力軸320に保持され、ハンド軸線Ax3まわりに回転するように第1出力軸350を保持する第2軸受け355,356と、を有する。
【選択図】図7
特許請求の範囲
【請求項1】
それぞれが基板を支持可能な第1ハンド及び第2ハンドと、
鉛直なハンド軸線まわりに前記第1ハンド及び前記第2ハンドを回転させるハンド関節と、
ベースと、
前記第1ハンド及び前記第2ハンドを前記ベースに連結するアームと、
前記アームに沿って並び、それぞれが鉛直なアーム軸線まわりに動作して、ベースに対する前記ハンド軸線の位置を変更する複数のアーム関節と、
を有する多関節アームを備え、
前記ハンド関節は、前記第1ハンドと、前記第2ハンドとを互いに独立して回転させるハンドモータを有し、
前記ハンドモータは、
前記第1ハンドに固定される第1出力軸と、
前記ハンド関節において前記第1ハンド及び前記第2ハンドに連結される前記多関節アームのリンクにおいて、前記ハンド軸線まわりの回転磁界を前記第1出力軸に作用させる第1ステータと、
前記第1出力軸を貫通して前記第2ハンドに固定される第2出力軸と、
前記リンクにおいて、前記ハンド軸線まわりの回転磁界を前記第2出力軸に作用させる第2ステータと、
前記リンクに保持され、前記ハンド軸線まわりに回転するように前記第1出力軸又は前記第2出力軸を保持する第1軸受けと、
前記第2出力軸の外周と前記第1出力軸の内周との間において前記第2出力軸に保持され、前記ハンド軸線まわりに回転するように前記第1出力軸を保持する第2軸受けと、
を有する、ロボット。
続きを表示(約 1,700 文字)
【請求項2】
前記第1軸受けは前記第2出力軸を保持し、
前記ハンドモータは、前記リンクに保持され、前記ハンド軸線まわりに回転するように前記第1出力軸を保持する第3軸受けを更に有する、
請求項1記載のロボット。
【請求項3】
前記ハンドモータは、前記リンクに固定され、前記ハンド軸線に沿って前記第2出力軸に挿入される固定軸を更に有し、
前記第1軸受けは、前記固定軸の外周と前記第2出力軸の内周との間において前記固定軸に保持されて前記第2出力軸を保持し、
前記第1出力軸は、前記ハンド軸線に垂直な径方向で前記第1ステータと対向し、前記第1ステータからの回転磁界を受ける第1ロータを有し、
前記第2出力軸は、前記径方向で前記第2ステータと対向し、前記第2ステータからの回転磁界を受ける第2ロータを有する、
請求項1記載のロボット。
【請求項4】
前記ハンドモータは、前記第1ステータと、前記第2ステータと、前記第1出力軸と、前記第2出力軸と、前記固定軸とを収容してユニット化するモータハウジングを有し、
前記モータハウジングは、前記第1ハンド及び前記第2ハンドが配置される方から前記リンクに取り付けられている、
請求項3記載のロボット。
【請求項5】
モータハウジングは、
前記第1ステータを収容する第1ハウジングと、
前記第2ステータを収容する第2ハウジングと、
前記第2ハウジングを前記第1ハウジングに取りつける締結部材と、
を有し、
前記第1ハウジングが前記リンクに取り付けられている、
請求項4記載のロボット。
【請求項6】
前記第1ステータは、前記第1ハンド及び前記第2ハンドが配置される方から前記リンクに取り付けられ、
前記第2ステータは、前記第1ハンド及び前記第2ハンドが配置される方の反対から前記リンクに取り付けられている、
請求項3記載のロボット。
【請求項7】
前記リンクは、
前記第1ハンド及び前記第2ハンドが配置される方に開口し、前記第1ステータを受け入れる第1収容孔と、
前記第1ハンド及び前記第2ハンドが配置される方の反対に開口し、前記第2ステータを受け入れる第2収容孔と、
前記第1収容孔と前記第2収容孔との間を仕切って前記第2出力軸を包囲する内向きフランジと、
を有する、
請求項6記載のロボット。
【請求項8】
前記第1ステータは、前記第1収容孔の内面に直接固定され、
前記第2ステータは、前記第2収容孔の内面に直接固定される、
請求項7記載のロボット。
【請求項9】
前記ハンドモータは、
前記第1出力軸の回転を検出する第1回転センサと、
前記第2出力軸の回転を検出する第2回転センサと、
を更に有し、
前記第1ステータ及び前記第2ステータは、前記第1回転センサと前記第2回転センサとの間に配置される、
請求項8記載のロボット。
【請求項10】
前記多関節アームは、前記第1ハンドと前記リンクとの間において、前記第1出力軸を包囲して前記リンクに取り付けられるカバーを更に有し、
前記第1回転センサは、
前記カバー内において、前記第1出力軸と共に回転する第1ディスクと、
前記カバーに取り付けられ、前記第1ディスクの回転を検出する第1センサヘッドと、
を含み、
前記固定軸は、
前記第1ハンド及び前記第2ハンドが位置する方の反対から前記リンクに取り付けられるフランジを有し、
前記第2回転センサは、
前記フランジと前記第2ステータとの間において、前記第2出力軸と共に回転する第2ディスクと、
前記フランジに取り付けられ、前記第2ディスクの回転を検出する第2センサヘッドと、
を含む、
請求項9記載のロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、ロボットアームと、ロボットアームの先端に設けられた第1ハンド及び第2ハンドを含む複数段のハンドと、ロボットアームの先端に回転軸線が規定され、ロボットアームの先端に第1ハンドを回転軸線を中心として回転可能に連結する第1のダイレクトドライブモータと、第1ハンドに第2ハンドを回転軸線を中心として回転可能に連結する第2のダイレクトドライブモータとを備える、ロボットが開示されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2020/054385号
【発明の概要】
【発明が解決しようとする課題】
【0004】
本開示は、複数段のハンドの駆動系の小型化及び剛性の両立に有効なロボットを提供する。
【課題を解決するための手段】
【0005】
本開示の一側面に係るロボットは、それぞれが基板を支持可能な第1ハンド及び第2ハンドと、鉛直なハンド軸線まわりに第1ハンド及び第2ハンドを回転させるハンド関節と、ベースと、第1ハンド及び第2ハンドをベースに連結するアームと、アームに沿って並び、それぞれが鉛直なアーム軸線まわりに動作して、ベースに対するハンド軸線の位置を変更する複数のアーム関節と、を有する多関節アームを備え、ハンド関節は、第1ハンドと、第2ハンドとを互いに独立して回転させるハンドモータを有し、ハンドモータは、第1ハンドに固定される第1出力軸と、ハンド関節において第1ハンド及び第2ハンドに連結される多関節アームのリンクにおいて、ハンド軸線まわりの回転磁界を第1出力軸に作用させる第1ステータと、第1出力軸を貫通して第2ハンドに固定される第2出力軸と、リンクにおいて、ハンド軸線まわりの回転磁界を第2出力軸に作用させる第2ステータと、リンクに保持され、ハンド軸線まわりに回転するように第1出力軸又は第2出力軸を保持する第1軸受けと、第2出力軸の外周と第1出力軸の内周との間において第2出力軸に保持され、ハンド軸線まわりに回転するように第1出力軸を保持する第2軸受けと、を有する。
【発明の効果】
【0006】
本開示によれば、複数段のハンドの駆動系の小型化及び剛性の両立に有効なロボットを提供することができる。
【図面の簡単な説明】
【0007】
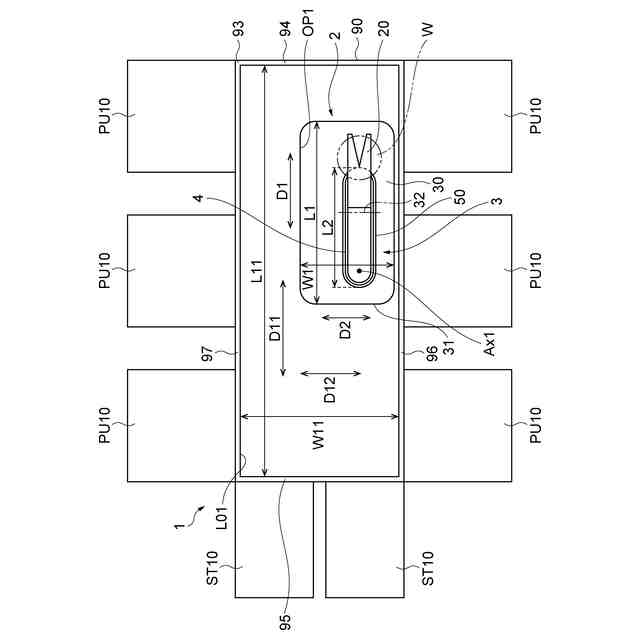
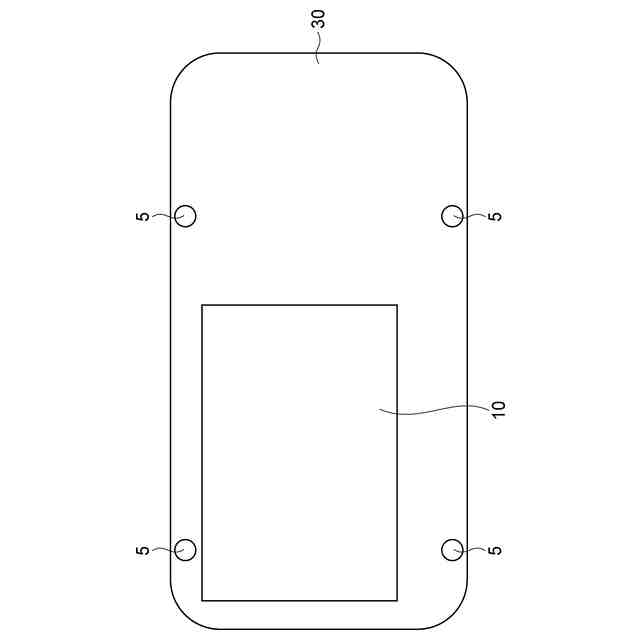
基板搬送装置の内部を例示する平面図である。
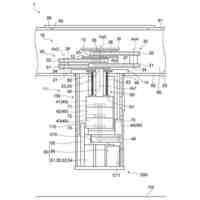
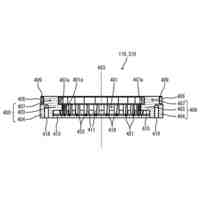
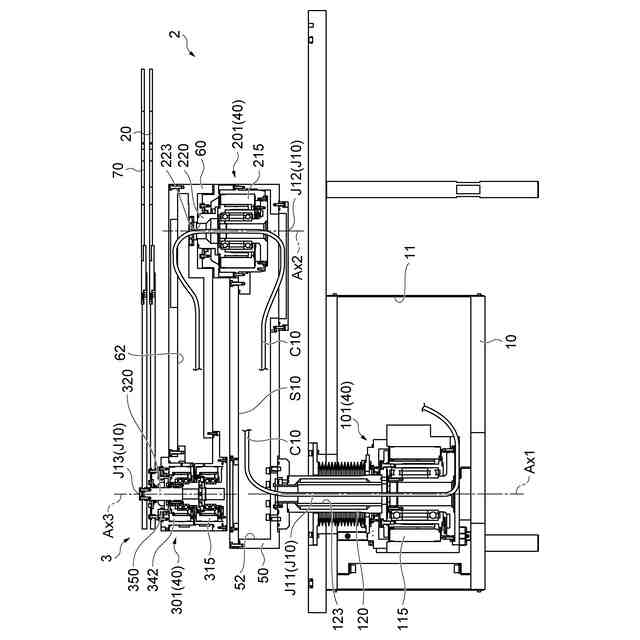
図1中のII-II線に沿った断面図である。
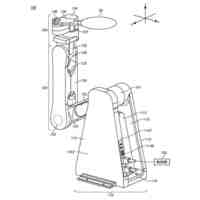
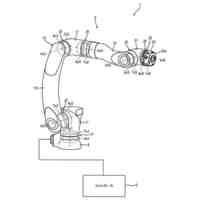
図2中のロボットの底面図である。
図1中のIV-IV線に沿った断面図である。
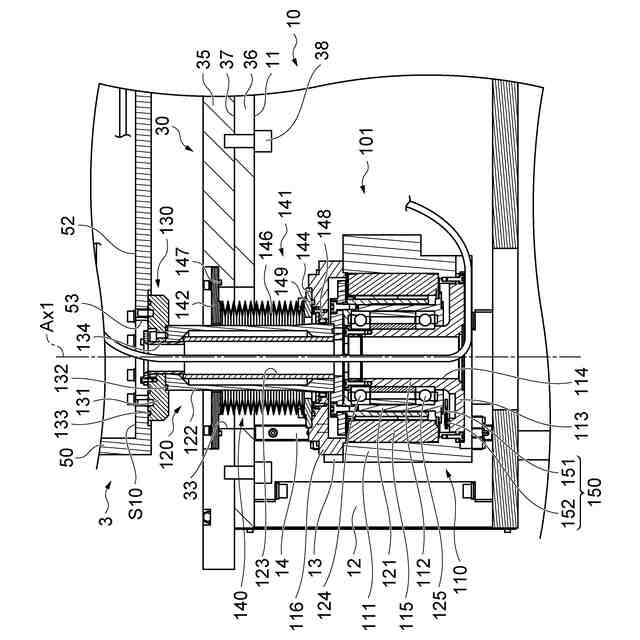
図4中の第1アームモータの拡大図である。
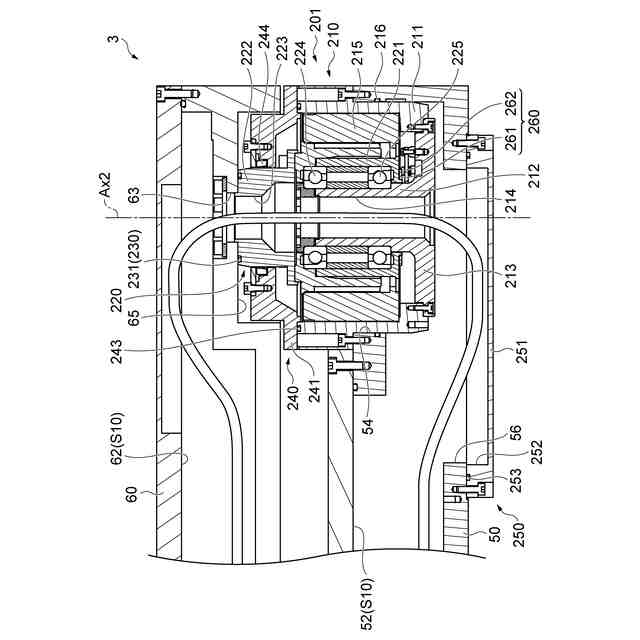
図4中の第2アームモータの拡大図である。
図4中のハンドモータの拡大図である。
ハンドモータの変形例を示す図である。
第2アームモータの変形例を示す図である。
ハンドモータの他の変形例を示す図である。
ハンドモータの更に他の変形例を示す図である。
チューブ及び空冷流路を例示する図である。
ケーブルの配線を例示する図である。
【発明を実施するための形態】
【0008】
以下、実施形態について、図面を参照しつつ詳細に説明する。説明において、同一要素又は同一機能を有する要素には同一の符号を付し、重複する説明を省略する。
【0009】
〔基板搬送装置〕
図1及び図2に示す基板搬送装置1は、基板Wが保管される1以上のステーションST10と、複数の処理モジュールPU10との間で基板Wを搬送する装置である。基板Wの例としては、半導体基板、ガラス基板、マスク基板、又はFPD(FlatPanelDisplay)基板等が挙げられる。基板搬送装置1は、チャンバ90と、ロボット2とを備える。チャンバ90は、長手方向D11と、長手方向D11に垂直な短手方向D12とを有する。長手方向D11と短手方向D12とが水平面に沿うように配置される。
【0010】
チャンバ90は、上下に並ぶ天板91と底板92とを有し、底板92と底板92との間の空間を包囲する周壁93を更に有する。以下、周壁93に包囲される空間を搬送空間S01という。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット
2日前
株式会社安川電機
ロボット及びシステム
2か月前
株式会社安川電機
システム及びロボット
2か月前
株式会社安川電機
ロボット、ロボットの製造方法
4日前
株式会社安川電機
ロボット、ロボットの製造方法
4日前
株式会社安川電機
制御装置及び制御装置の冷却方法
1か月前
株式会社安川電機
ロボットシステム及びロボット制御方法
3か月前
株式会社安川電機
ロボットシステム、コントローラ及び制御方法
1か月前
株式会社安川電機
ロボット、システム、制御方法、及びプログラム
2か月前
株式会社安川電機
ロボット、システム、制御方法、及びプログラム
2か月前
株式会社安川電機
ロボットシステム、ロボット、ロボットの制御方法
18日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
2日前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
2日前
株式会社安川電機
制御システム、プラントシステム、コントローラ、及び制御方法
3か月前
株式会社安川電機
ロボット制御システム、ロボットコントローラ、及びロボット制御方法
2か月前
株式会社安川電機
搬送ロボットおよびロボットシステム
1か月前
OMC株式会社
ロボット
1か月前
日東精工株式会社
電動ドライバ
5日前
株式会社クレスコ
補助吸着具
1か月前
株式会社ダイヘン
移動体
8日前
株式会社不二越
ロボット
1か月前
トヨタ自動車株式会社
関節機構
10日前
個人
深孔スリーブ駆動ロッド構造
2か月前
株式会社エビス
腰ベルト用連結具
1か月前
東京都公立大学法人
対象物把持装置
19日前
工機ホールディングス株式会社
作業機
1か月前
個人
バール
2か月前
株式会社スター精機
吸着パッド
4日前
株式会社スター精機
吸着パッド
4日前
学校法人五島育英会
アーム機構
10日前
住友重機械工業株式会社
ロボット
1か月前
株式会社PILLAR
チューブ保持治具
15日前
株式会社アイエイアイ
グリッパー
25日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ