TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025084630
公報種別
公開特許公報(A)
公開日
2025-06-03
出願番号
2023198688
出願日
2023-11-22
発明の名称
ロボット、ロボットの製造方法
出願人
株式会社安川電機
代理人
弁理士法人第一テクニカル国際特許事務所
主分類
B25J
17/00 20060101AFI20250527BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
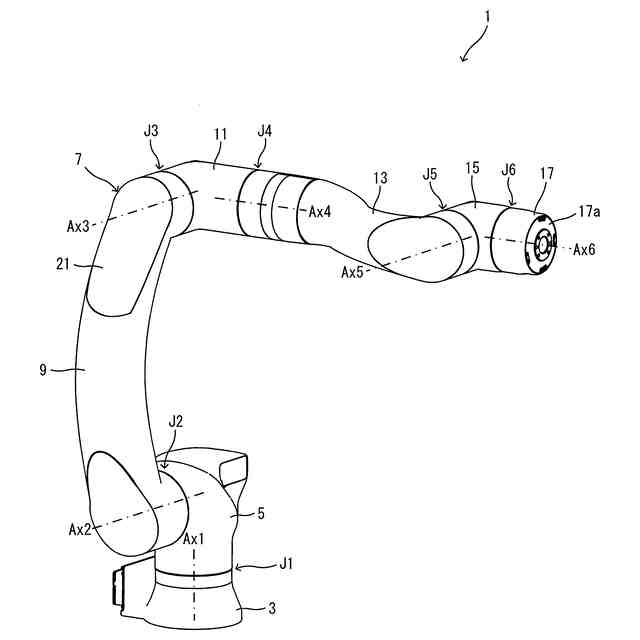
【課題】アームを小型化する。
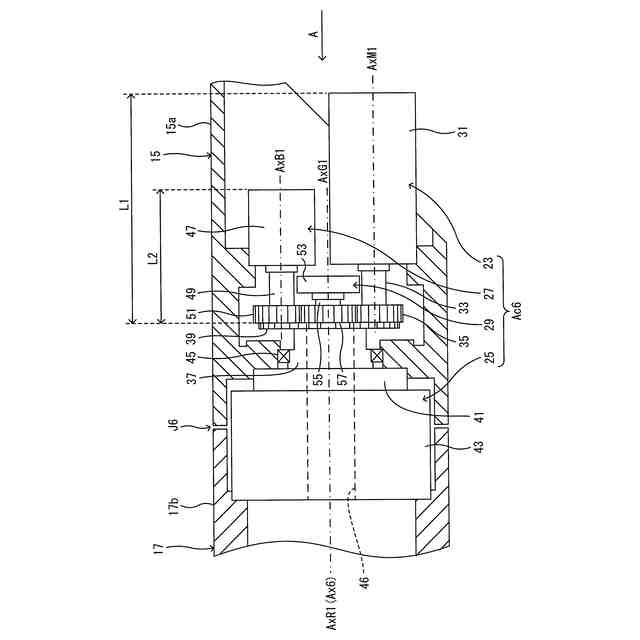
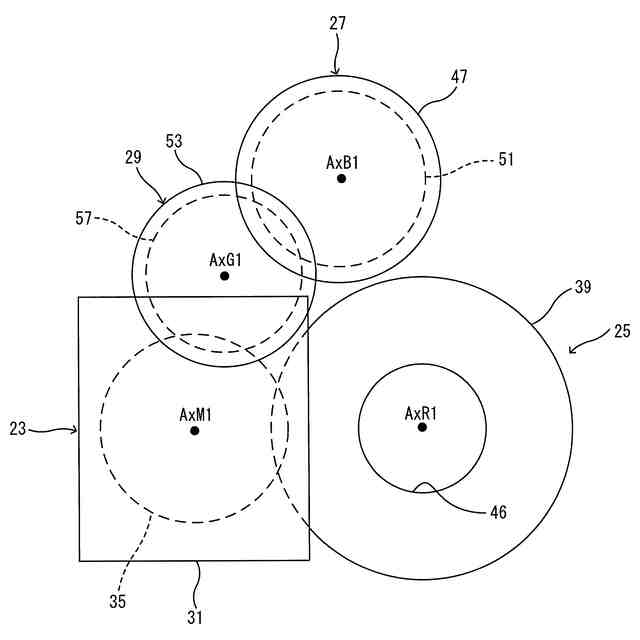
【解決手段】ロボット1は、手首部15及びフランジ部17と、手首部15に収容され、モータ軸心AxM1の周りに回転する第1ギア35を備えたモータ23と、第1ギア35の回転に連動してモータ軸心AxM1に平行且つモータ軸心AxM1からずれた減速機軸心AxR1の周りに回転する第2ギア39、及び、フランジ部17に連結された出力軸43を備え、第2ギア39の回転を減速して出力軸43に伝達する減速機25と、モータ23に対してモータ軸心AxM1に垂直な方向に対向するように手首部15に収容され、モータ軸心AxM1及び減速機軸心AxR1に平行且つモータ軸心AxM1及び減速機軸心AxR1からそれぞれずれたブレーキ軸心AxB1の周りに回転し、第2ギア39から離間した位置で第1ギア35に連動して回転する第3ギア51を備え、第1ギア35の回転を制動するブレーキ装置27と、を有する。
【選択図】図4
特許請求の範囲
【請求項1】
第1アームと、
前記第1アームに回転可能に連結された第2アームと、
前記第1アームに収容され、第1軸心の周りに回転する第1ギアを備えた第1モータと、
前記第1ギアの回転に連動して前記第1軸心に平行且つ前記第1軸心からずれた第2軸心の周りに回転する第2ギア、及び、前記第2アームに連結された第1出力軸を備え、前記第2ギアの回転を減速して前記第1出力軸に伝達する第1減速機と、
前記第1モータに対して前記第1軸心に垂直な方向に対向するように前記第1アームに収容され、前記第1軸心及び前記第2軸心に平行且つ前記第1軸心及び前記第2軸心からそれぞれずれた第3軸心の周りに回転し、前記第2ギアから離間した位置で前記第1ギアに連動して回転する第3ギアを備え、前記第1ギアの回転を制動する第1ブレーキ装置と、
を有する、ロボット。
続きを表示(約 1,800 文字)
【請求項2】
前記第1ギアは、
前記第2ギアと連結され、
前記第3ギアは、
前記第2ギアとの間に隙間を有するように設けられる、
請求項1に記載のロボット。
【請求項3】
前記第1モータの前記第1軸心の方向における寸法は、
前記第1ブレーキ装置の前記第3軸心の方向における寸法よりも長い、
請求項1又は2に記載のロボット。
【請求項4】
前記第1減速機は、
前記第2ギア及び前記第1出力軸に前記第2軸心に沿って延びる第1中空部を有し、
前記第1モータは、
前記第1中空部を前記第2軸心の方向に延長した第1空間の径方向外側に配置された第1筐体を有し、
前記第1ブレーキ装置は、
前記第1空間の径方向外側に配置された第2筐体を有する、
請求項1又は2に記載のロボット。
【請求項5】
前記第1アームに収容され、前記第1軸心、前記第2軸心、及び前記第3軸心に平行且つ前記第1軸心、前記第2軸心、及び前記第3軸心からそれぞれずれた第4軸心の周りに回転し、前記第3ギアの制動力を前記第1ギアに伝達する少なくとも1つの第4ギアを有する、
請求項4に記載のロボット。
【請求項6】
前記第3ギアの歯数は、
前記第1ギアの歯数以下である、
請求項1又は2に記載のロボット。
【請求項7】
前記第1アームの前記第2アームとは異なる位置に回転可能に連結された第3アームと、
前記第1アームに収容され、第5軸心の周りに回転する第5ギアを備えた第2モータと、
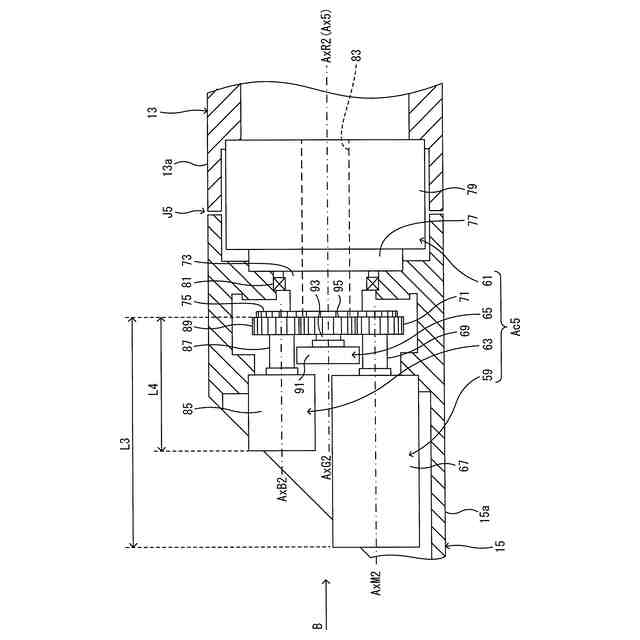
前記第5ギアの回転に連動して前記第5軸心に平行且つ前記第5軸心からずれた、前記第2軸心と交差する第6軸心の周りに回転する第6ギア、及び、前記第3アームに連結された第2出力軸を備え、前記第6ギアの回転を減速して前記第2出力軸に伝達する第2減速機と、
前記第2モータと前記第5軸心に垂直な方向に対向するように前記第1アームに収容され、前記第5軸心及び前記第6軸心に平行且つ前記第5軸心及び前記第6軸心からそれぞれずれた第7軸心の周りに回転し、前記第6ギアから離間した位置で前記第5ギアに連動して回転する第7ギアを備え、前記第5ギアの回転を制動する第2ブレーキ装置と、
をさらに有し、
前記第2減速機は、
前記第6ギア及び前記第2出力軸に前記第6軸心に沿って延びる第2中空部を有し、
前記第2モータは、
前記第2中空部を前記第6軸心の方向に延長した第2空間の径方向外側に配置された第3筐体を有し、
前記第2ブレーキ装置は、
前記第2空間の径方向外側に配置された第4筐体を有し、
前記第1モータ、前記第1ブレーキ装置、前記第2モータ、及び前記第2ブレーキ装置の各々は、前記第1空間と前記第2空間とを接続した折れ曲がった形状の第3空間と干渉しないように配置されている、
請求項4に記載のロボット。
【請求項8】
前記第1モータの前記第1軸心は、
互いに交差する前記第2軸心と前記第6軸心を含む平面の一方側に配置され、
前記第2モータの前記第5軸心は、
前記平面の他方側に配置される、
請求項7に記載のロボット。
【請求項9】
第1アームと、
前記第1アームに回転可能に連結された第2アームと、
を有するロボットの製造方法であって、
前記第1アームに収容され、第1軸心の周りに回転する第1ギアを備えた第1モータ、及び、前記第1ギアの回転に連動して前記第1軸心に平行且つ前記第1軸心からずれた第2軸心の周りに回転する第2ギア、及び、前記第2アームに連結された第1出力軸を備え、前記第2ギアの回転を減速して前記第1出力軸に伝達する第1減速機に対し、
第3軸心の周りに回転する第3ギアを備え、前記第1ギアの回転を制動する第1ブレーキ装置を、前記第1モータに対して前記第1軸心に垂直な方向に対向し、前記第3軸心が前記第1軸心及び前記第2軸心に平行且つ前記第1軸心及び前記第2軸心からそれぞれ離間し、且つ、前記第3ギアが前記第2ギアから離間した位置で前記第1ギアに連動して回転するように、組み付けること、
を有する、ロボットの製造方法。
発明の詳細な説明
【技術分野】
【0001】
開示の実施形態は、ロボット及びロボットの製造方法に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば特許文献1には、ロボットのアームに取り付けられる回転電機が記載されている。この回転電機は、回転体を軸中心に回転させる回転電機本体と、回転体の回転を停止させる制動装置と、回転電機本体及び制動装置を保持する筐体と、を備え、制動装置が回転体の軸からずれた位置に配置されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-131472号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、制動装置が回転体の軸からずれた位置において、回転電機本体から軸方向に突出して設けられている。このため、アームの小型化に関して更なる向上の余地があった。
【0005】
本発明はこのような問題点に鑑みてなされたものであり、アームを小型化することができるロボット及びロボットの製造方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明の一の観点によれば、第1アームと、前記第1アームに回転可能に連結された第2アームと、前記第1アームに収容され、第1軸心の周りに回転する第1ギアを備えた第1モータと、前記第1ギアの回転に連動して前記第1軸心に平行且つ前記第1軸心からずれた第2軸心の周りに回転する第2ギア、及び、前記第2アームに連結された第1出力軸を備え、前記第2ギアの回転を減速して前記第1出力軸に伝達する第1減速機と、前記第1モータに対して前記第1軸心に垂直な方向に対向するように前記第1アームに収容され、前記第1軸心及び前記第2軸心に平行且つ前記第1軸心及び前記第2軸心からそれぞれずれた第3軸心の周りに回転し、前記第2ギアから離間した位置で前記第1ギアに連動して回転する第3ギアを備え、前記第1ギアの回転を制動する第1ブレーキ装置と、を有する、ロボットが適用される。
【0007】
また、本発明の別の観点によれば、第1アームと、前記第1アームに回転可能に連結された第2アームと、を有するロボットの製造方法であって、前記第1アームに収容され、第1軸心の周りに回転する第1ギアを備えた第1モータ、及び、前記第1ギアの回転に連動して前記第1軸心に平行且つ前記第1軸心からずれた第2軸心の周りに回転する第2ギア、及び、前記第2アームに連結された第1出力軸を備え、前記第2ギアの回転を減速して前記第1出力軸に伝達する第1減速機に対し、第3軸心の周りに回転する第3ギアを備え、前記第1ギアの回転を制動する第1ブレーキ装置を、前記第1モータに対して前記第1軸心に垂直な方向に対向し、前記第3軸心が前記第1軸心及び前記第2軸心に平行且つ前記第1軸心及び前記第2軸心からそれぞれ離間し、且つ、前記第3ギアが前記第2ギアから離間した位置で前記第1ギアに連動して回転するように、組み付けること、を有する、ロボットの製造方法が適用される。
【発明の効果】
【0008】
本発明のロボット等によれば、アームを小型化することができる。
【図面の簡単な説明】
【0009】
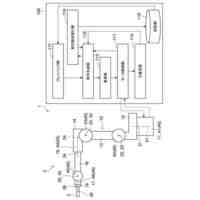
実施形態に係るロボットの構成の一例を表す斜視図である。
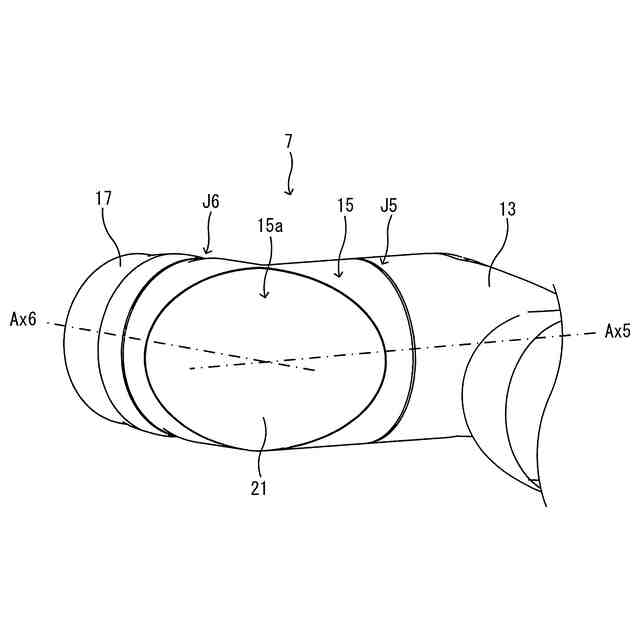
ロボットの手首部のカバーが取り付けられた状態の一例を表す斜視図である。
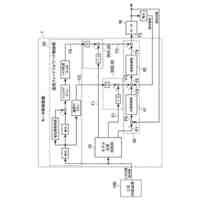
ロボットの手首部のカバーが取り外された状態の一例を表す斜視図である。
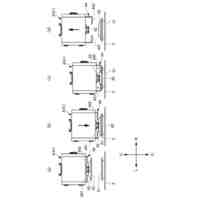
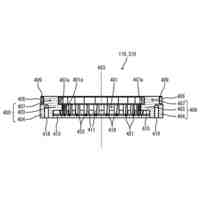
関節部に設けられたアクチュエータの構成の一例を表す断面図である。
図4の矢印A方向から見た場合のアクチュエータの各ギアの配置構成の一例を表す矢視図である。
他の関節部に設けられたアクチュエータの構成の一例を表す断面図である。
図6の矢印B方向から見た場合のアクチュエータの各ギアの配置構成の一例を表す矢視図である。
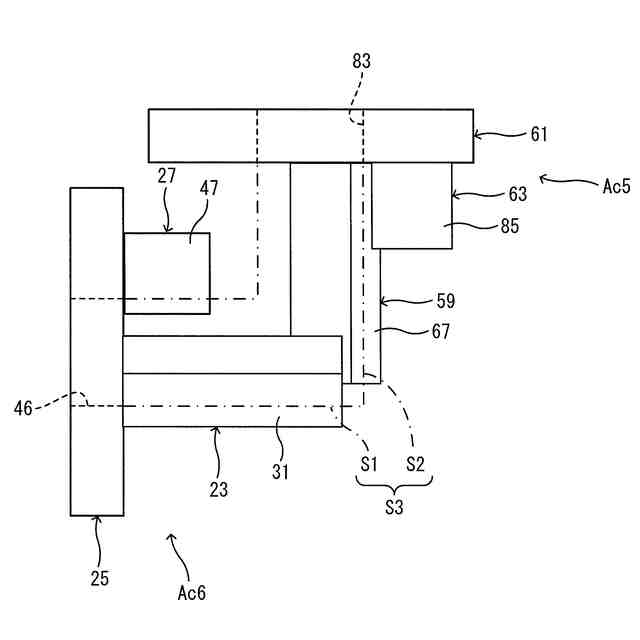
図3の矢印C方向から見た場合のモータとブレーキ装置の配置の一例を概略的に示す概略図である。
図3の矢印D方向から見た場合のモータとブレーキ装置の配置の一例を概略的に示す概略図である。
図3の矢印E方向から見た場合のモータとブレーキ装置の配置の一例を概略的に示す概略図である。
【発明を実施するための形態】
【0010】
以下、実施形態について図面を参照しつつ説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社安川電機
摩耗情報算出システム
1か月前
株式会社安川電機
ロボットシステム及び制御方法
1か月前
株式会社安川電機
モータ制御装置、モータ制御方法、及びプログラム
23日前
キユーピー株式会社
蓋閉め装置および蓋閉め方法
1か月前
株式会社安川電機
ロボットシステム、及びロボットシステムの製造方法
1か月前
株式会社安川電機
アキシャルギャップモータ、ロボット、ロボットシステム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社安川電機
制御支援システム、制御支援方法、および制御支援プログラム
1か月前
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
26日前
株式会社ダイヘン
移動体
2か月前
トヨタ自動車株式会社
関節機構
2か月前
住友重機械工業株式会社
教示装置
23日前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社ダイヘン
搬送装置
1か月前
川崎重工業株式会社
ロボット
24日前
学校法人五島育英会
アーム機構
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
23日前
工機ホールディングス株式会社
作業機
23日前
株式会社スター精機
吸着パッド
2か月前
株式会社スター精機
吸着パッド
2か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社PILLAR
チューブ保持治具
2か月前
住友重機械工業株式会社
支援装置
1か月前
株式会社スター精機
産業用ロボット
1か月前
ホシデン株式会社
分解用治具
1か月前
アピュアン株式会社
衝撃工具
1か月前
株式会社マキタ
電気機器
24日前
オークラ輸送機株式会社
ハンド装置
1か月前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
工機ホールディングス株式会社
作業機
26日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ