TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103226
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220453
出願日
2023-12-27
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250702BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】シャフトと他の部材との干渉を抑制しながら、モータの特性を調整することが可能なロボットを提供する。
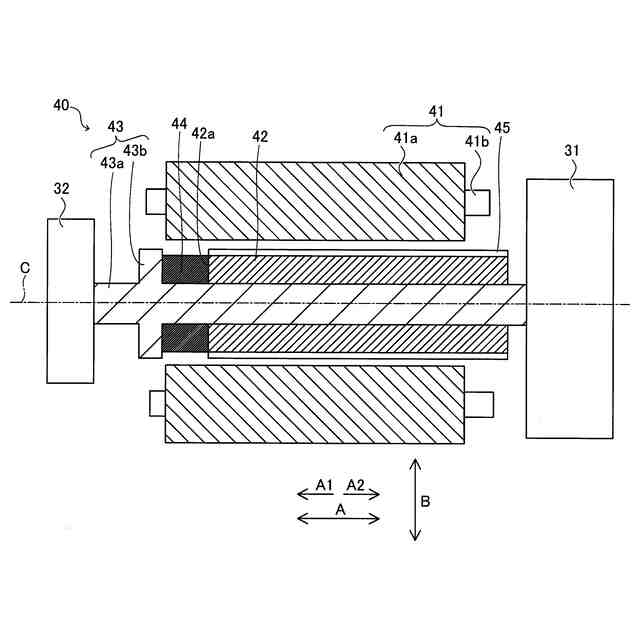
【解決手段】このロボット100は、モータ40を含むロボットアーム13および14を備える。モータ40は、ステータ41と、ステータ41に対向するように配置され、永久磁石45が配置されるロータ42と、ロータ42に取り付けられるシャフト43と、シャフト43と、永久磁石45が配置されたロータ42との間に配置され、ステータ41と永久磁石45が配置されたロータ42とのシャフト43の軸線方向Aにおける相対的な位置を固定する非磁性体の位置固定部材44と、を有する。
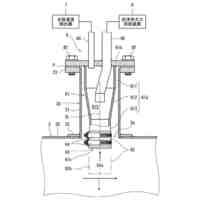
【選択図】図3
特許請求の範囲
【請求項1】
モータを含むロボットアームを備え、
前記モータは、
ステータと、
前記ステータに対向するように配置され、永久磁石が配置されるロータと、
前記ロータに取り付けられるシャフトと、
前記シャフトと、前記永久磁石が配置された前記ロータとの間に配置され、前記ステータと前記永久磁石が配置された前記ロータとの前記シャフトの軸線方向における相対的な位置を固定する非磁性体の位置固定部材と、を有する、ロボット。
続きを表示(約 920 文字)
【請求項2】
前記ロボットアームは、複数の関節を含み、
前記モータは、前記複数の関節毎に配置され、
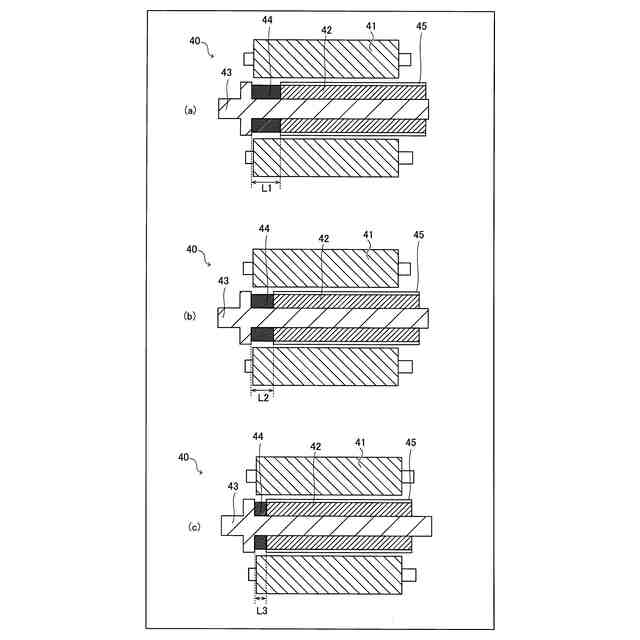
前記複数のモータの、前記ステータと、前記ロータと、前記シャフトとは共通の部品であり、前記位置固定部材の有無または前記シャフトの軸線方向における前記位置固定部材の長さを異ならせることにより、各モータの特性が調整されている、請求項1に記載のロボット。
【請求項3】
前記複数の関節のうち、前記ロボットアームの先端に近い方の関節を回転するモータとして前記位置固定部材を有する前記モータが配置され、前記ロボットアームの基端に近い方の関節を回転するモータとして前記位置固定部材を有しない固定部材無しモータが配置されている、請求項2に記載のロボット。
【請求項4】
前記複数の関節のうち、前記ロボットアームの先端に近い方の複数の関節を回転するモータとして前記位置固定部材を有する前記モータが配置されており、
前記複数の関節のうち先端により近い方の関節を回転するモータほど、前記シャフトの軸線方向における前記位置固定部材の長さが大きい、請求項2に記載のロボット。
【請求項5】
前記ロボットは、人型のロボットを含む、請求項1に記載のロボット。
【請求項6】
前記シャフトは、前記シャフトの軸線方向に直交する方向に突出するフランジ部を含み、
前記位置固定部材は、前記フランジ部と、前記軸線方向の前記ロータの端面との間に配置されている、請求項1に記載のロボット。
【請求項7】
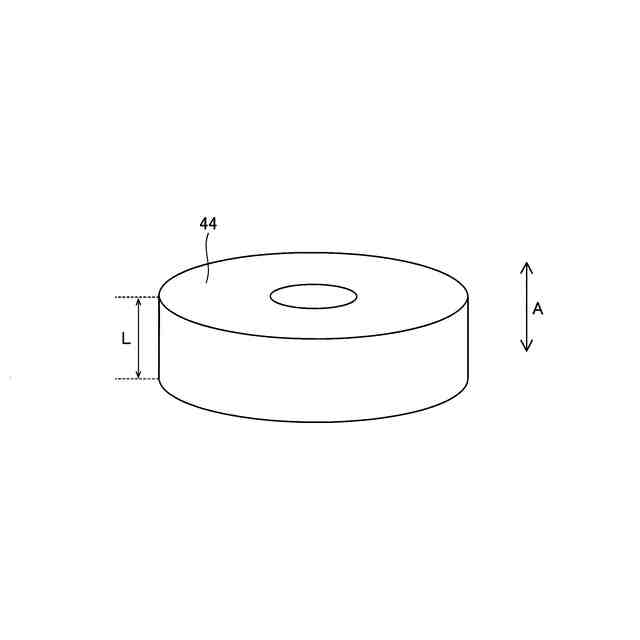
前記位置固定部材は、前記フランジ部と、前記軸線方向の前記ロータの端面との間に配置され前記シャフトに挿入されている円環状のシム部材を含む、請求項6に記載のロボット。
【請求項8】
前記位置固定部材により前記ステータとの相対的な位置が固定された前記ロータが取り付けられる前記シャフトに接続され、前記モータの回転を減速する減速機と、
前記モータに対して前記シャフトの軸線方向に隣り合うエンコーダと、を備える、請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、ロボットを駆動するモータが開示されている。特許文献1には、ステータと、ロータと、シャフトと、軸受けと、を備えるモータが開示されている。特許文献1のモータでは、ロータはシャフトに取り付けられている。また、軸受けはシャフトを支持する。また、特許文献1では、ロータの半径方向の厚みが、シャフトの軸方向に沿って徐々に変化する。また、ステータの半径方向の厚みも、ロータとの半径方向の間隔が一定になるように、シャフトの軸方向に沿って徐々に変化する。すなわち、特許文献1では、ロータの外周面とステータの内周面とが、共に、シャフトの軸方向に沿っておらず軸方向に交差する方向に沿っている。また、特許文献1では、シャフトは段差部を含み、段差部と軸受けとの間にロータ位置調整板が配置されている。これにより、ロータ位置調整板の厚み分、シャフトの位置、および、ロータの位置が共にステータに対してシャフトの軸線方向に移動される。その結果、ロータとステータとの間の間隔が変更される。これにより、モータのトルクが調整される。すなわち、モータの特性が調整される。
【先行技術文献】
【特許文献】
【0003】
特開昭63-287350号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1に開示されているモータでは、シャフトの段差部と軸受けとの間にロータ位置調整板が配置されているため、ロータ位置調整板によりロータと共にシャフトも軸線方向に移動する。このため、シャフトの軸線方向に隣り合うように他の部材が配置されている場合、シャフトと他の部材とが干渉してしまう場合があるという問題点がある。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、シャフトと他の部材との干渉を抑制しながら、モータの特性を調整することが可能なロボットを提供することである。
【課題を解決するための手段】
【0006】
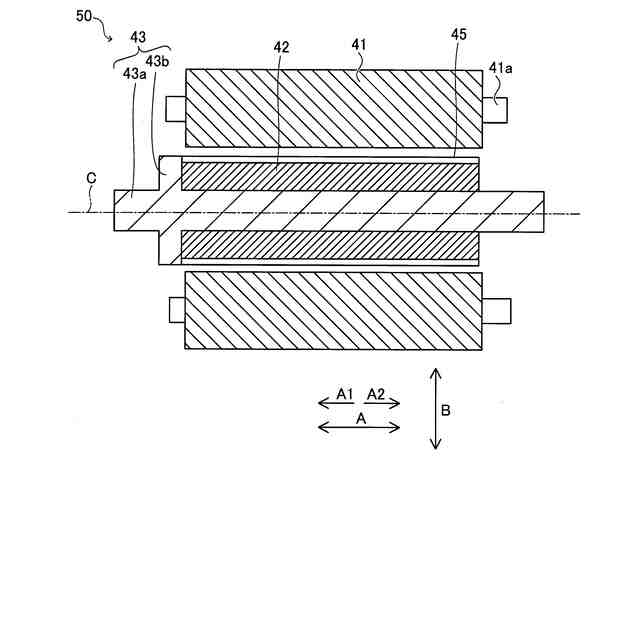
この開示の一の局面によるロボットは、モータを含むロボットアームを備え、モータは、ステータと、ステータに対向するように配置され、永久磁石が配置されるロータと、ロータに取り付けられるシャフトと、シャフトと、永久磁石が配置されたロータとの間に配置され、ステータと永久磁石が配置されたロータとのシャフトの軸線方向における相対的な位置を固定する非磁性体の位置固定部材と、を有する。
【0007】
この開示の一の局面によるロボットは、上記のように、シャフトと、永久磁石が配置されたロータとの間に配置され、ステータと永久磁石が配置されたロータとのシャフトの軸線方向における相対的な位置を固定する非磁性体の位置固定部材を有する。これにより、位置固定部材がシャフトとロータとの間に配置されているので、シャフトを軸線方向に移動させずにロータだけをシャフトの軸線方向に移動させた状態でステータとロータとのシャフトの軸線方向における相対的な位置を調整することができる。そのため、ステータとロータとが互いに対向する面積が変更される。たとえば、対向する面積が小さくされた場合、ステータに生じる逆起電力が小さくなり、モータを高速に回転することが可能になる。このように、シャフトを軸線方向に移動させずにモータの特性を調整することができるので、シャフトと他の部材との干渉を抑制しながら、モータの特性を調整することができる。
【発明の効果】
【0008】
本開示によれば、シャフトと他の部材との干渉を抑制しながら、モータの特性を調整することができる。
【図面の簡単な説明】
【0009】
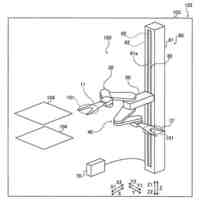
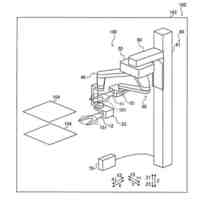
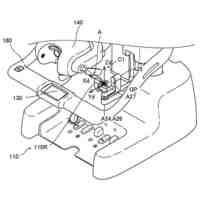
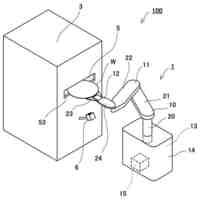
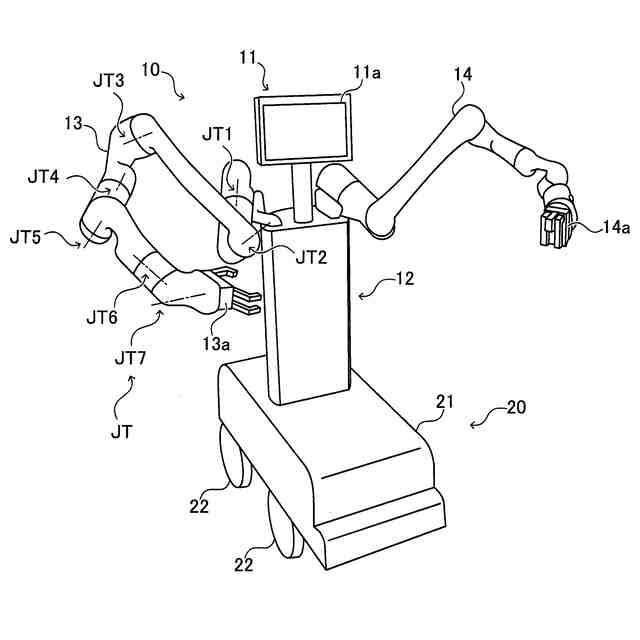
一実施形態によるロボットの斜視図である。
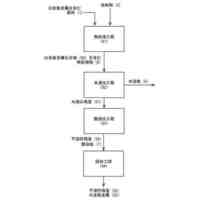
一実施形態によるロボットのブロック図である。
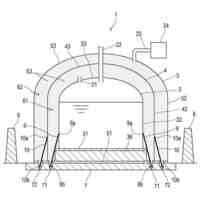
一実施形態によるモータの断面図である。
一実施形態による位置固定部材を示す図である。
位置固定部材が配置されていないモータの断面図である。
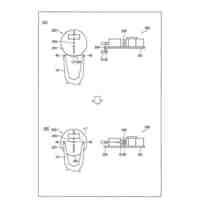
(a)位置固定部材の長さが大きいモータの断面図である。(b)位置固定部材の長さが中程度のモータの断面図である。(c)位置固定部材の長さが小さいモータの断面図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の一実施形態を図面に基づいて説明する。なお、本願明細書において、図3に示すように、モータ40のシャフト43の軸線方向を、A方向とする。A方向の一方側をA1側とし、他方側をA2側とする。なお、シャフト43の軸線とは、シャフト43の回転軸線Cを意味する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
表面材
11日前
川崎重工業株式会社
水素遮蔽膜
1か月前
川崎重工業株式会社
排ガス採取器
15日前
川崎重工業株式会社
廃棄物投入ホッパ
1か月前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
基板搬送ロボット
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
位置情報システム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
ロボットシステム
3日前
川崎重工業株式会社
クローズドインペラ
3日前
川崎重工業株式会社
液化ガス導入システム
11日前
川崎重工業株式会社
正極活物質の再生方法
4日前
川崎重工業株式会社
電池セル及びその分解方法
25日前
川崎重工業株式会社
換気システム及びシェルター
1か月前
川崎重工業株式会社
ロボットシステム及びロボット
3日前
川崎重工業株式会社
電力供給システムおよびその制御方法
10日前
川崎重工業株式会社
白金族金属の可溶化方法及び金属の分離方法
10日前
川崎重工業株式会社
液化ガス用配管ユニットおよびその組立方法
3日前
川崎重工業株式会社
歯車装置の支持構造の診断装置及び診断方法
2日前
川崎重工業株式会社
ガスタービンエンジンの制御装置および制御方法
7日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
手術支援システムおよび手術支援システムの制御方法
1日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
21日前
川崎重工業株式会社
多重殻タンク
21日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
16日前
川崎重工業株式会社
基板搬送装置及び基板位置ずれ測定プログラム
15日前
中国電力株式会社
ポート検出器、ポート異常検出システム、ポート検出器の製造方法及びポート異常検出方法
23日前
個人
固定補助具
21日前
個人
折りたたみ工具
4日前
株式会社三協システム
製函機
2日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ