TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025101296
公報種別
公開特許公報(A)
公開日
2025-07-07
出願番号
2023218046
出願日
2023-12-25
発明の名称
作業機
出願人
工機ホールディングス株式会社
代理人
個人
,
個人
主分類
B25B
21/02 20060101AFI20250630BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業フィーリングの良い作業機を提供する。
【解決手段】ネジ締めが可能な作業機1において、演算部95は、トリガスイッチ6が操作されてモータ3を通常制御で起動した直後に伝達機構によって断続回転力が発生しなかった場合(打撃が発生しなかった場合)は、その後にパルス制御に切り替えてモータ3を駆動し、トリガスイッチ6が操作されてモータ3を通常制御で起動した直後に伝達機構によって断続回転力が発生した場合(打撃が発生した場合)は、その後も通常制御でモータ3を駆動する。
【選択図】図2
特許請求の範囲
【請求項1】
ネジ締めが可能な作業機であって、
モータと、
先端工具保持部と、
前記モータの回転を前記先端工具保持部に伝達する伝達機構であって、前記先端工具保持部に加わる負荷に応じて前記先端工具保持部に連続回転力又は断続回転力を発生するよう構成された伝達機構と、
前記モータを所定方向に連続回転させる通常制御と、前記モータの前記所定方向への回転と前記モータの前記所定方向とは逆方向への回転又は停止とを繰り返すパルス制御と、を実行可能な第1モードを有する制御部と、
前記モータの起動及び停止を指示するよう構成された操作部と、
を備えた作業機であって、
前記制御部は、前記第1モードにおいて、
前記操作部が操作されて前記モータを前記通常制御で起動した直後に前記伝達機構によって前記断続回転力が発生しなかった場合は、その後に前記パルス制御に切り替えて前記モータを駆動することが可能に構成され、かつ、
前記操作部が操作されて前記モータを前記通常制御で起動した直後に前記伝達機構によって前記断続回転力が発生した場合は、その後も前記通常制御で前記モータを駆動することが可能に構成された、
ことを特徴とする作業機。
続きを表示(約 320 文字)
【請求項2】
請求項1記載の作業機であって、
前記制御部は、前記第1モードと、前記第1モードとは異なる第2モードと、を有し、
前記制御部によって前記第1モード又は前記第2モードのいずれを実行するかを作業者が選択できるよう構成されたモード切替操作部を備える、
ことを特徴とする作業機。
【請求項3】
請求項1又は2記載の作業機であって、
前記伝達機構は、インパクト機構であって、前記モータによって回転駆動され、前記先端工具保持部としてのアンビルに加わる負荷が大きくなると、前記アンビルと一体に回転する状態から前記アンビルを打撃する状態に切り替わるハンマを含む、
ことを特徴とする作業機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ネジ締めが可能な作業機に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
ハンマをアンビルに衝突させた打撃力によりネジ締め等の作業を行うインパクトドライバ等の作業機が知られている。インパクトドライバは、ハンマをアンビルに向けて付勢するバネを備え、トリガスイッチの1回の操作においてハンマを一方向のみに回転させる。ハンマは、アンビルの係合突起との衝突後にバネの付勢力に抗してアンビルから離れる方向に移動し、係合突起を乗り越えて回転することで、再び係合突起と衝突可能な状態となる。
【0003】
特許文献1と特許文献2は、インパクトドライバに関し、モータを連続回転させる通常制御と、モータを断続回転させるパルス制御(電子パルス制御)と、を実行可能な制御部を備えることを開示する。
【先行技術文献】
【特許文献】
【0004】
特許5725347号公報
特開2023-166104号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
モータの起動直後にインパクト機構による打撃が発生した場合にパルス制御が行われると、作業フィーリングが悪化する。
【0006】
本発明は、作業フィーリングの良い作業機を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明のある態様は、作業機である。この作業機は、
ネジ締めが可能な作業機であって、
モータと、
先端工具保持部と、
前記モータの回転を前記先端工具保持部に伝達する伝達機構であって、前記先端工具保持部に加わる負荷に応じて前記先端工具保持部に連続回転力又は断続回転力を発生するよう構成された伝達機構と、
前記モータを所定方向に連続回転させる通常制御と、前記モータの前記所定方向への回転と前記モータの前記所定方向とは逆方向への回転又は停止とを繰り返すパルス制御と、を実行可能な第1モードを有する制御部と、
前記モータの起動及び停止を指示するよう構成された操作部と、
を備えた作業機であって、
前記制御部は、前記第1モードにおいて、
前記操作部が操作されて前記モータを前記通常制御で起動した直後に前記伝達機構によって前記断続回転力が発生しなかった場合は、その後に前記パルス制御に切り替えて前記モータを駆動することが可能に構成され、かつ、
前記操作部が操作されて前記モータを前記通常制御で起動した直後に前記伝達機構によって前記断続回転力が発生した場合は、その後も前記通常制御で前記モータを駆動することが可能に構成された、
ことを特徴とする。
【0008】
本発明は「電動作業機」や「電動工具」、「電気機器」等と表現されてもよく、そのように表現されたものも本発明の態様として有効である。
【発明の効果】
【0009】
本発明によれば、作業フィーリングの良い作業機を提供することが可能となる。
【図面の簡単な説明】
【0010】
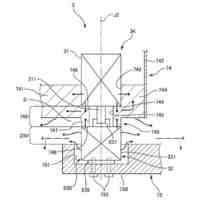
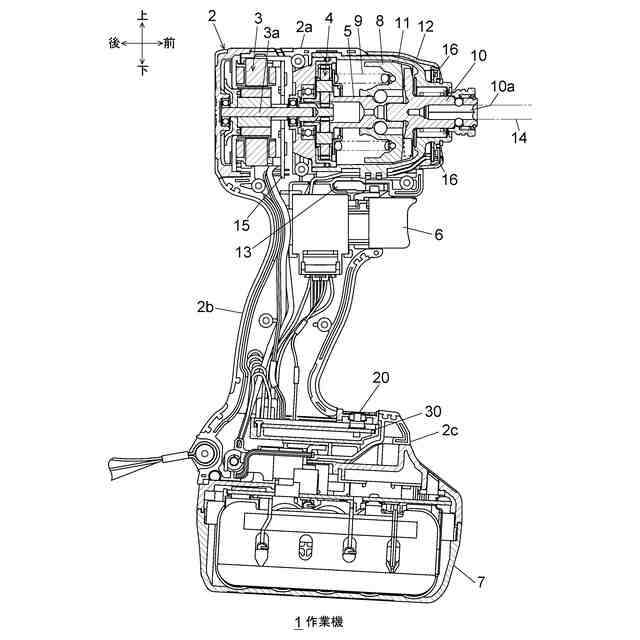
本発明の実施形態に係る作業機1の側断面図。
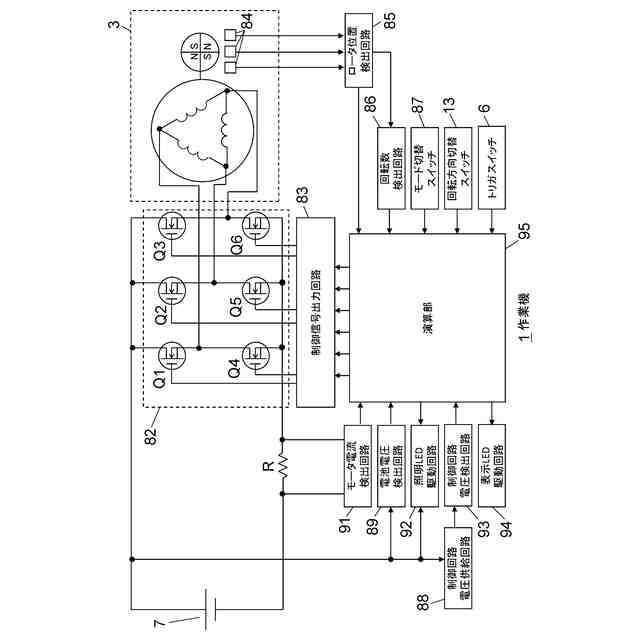
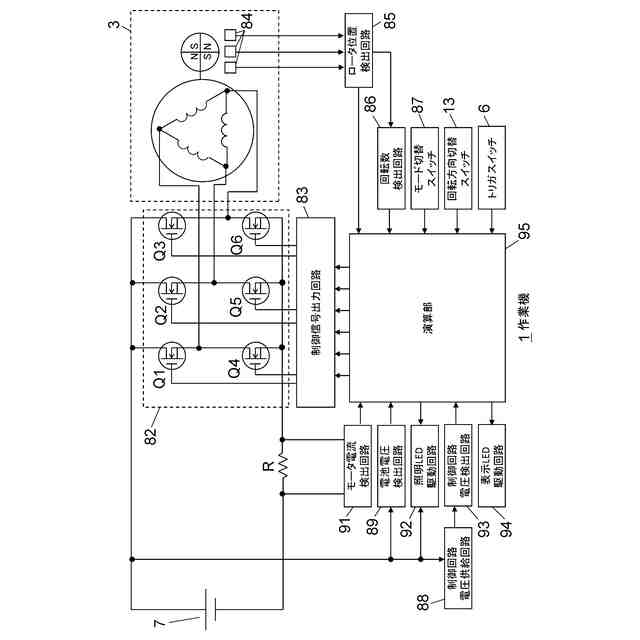
作業機1の回路ブロック図。
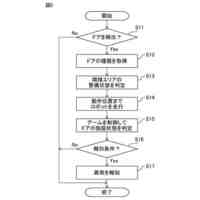
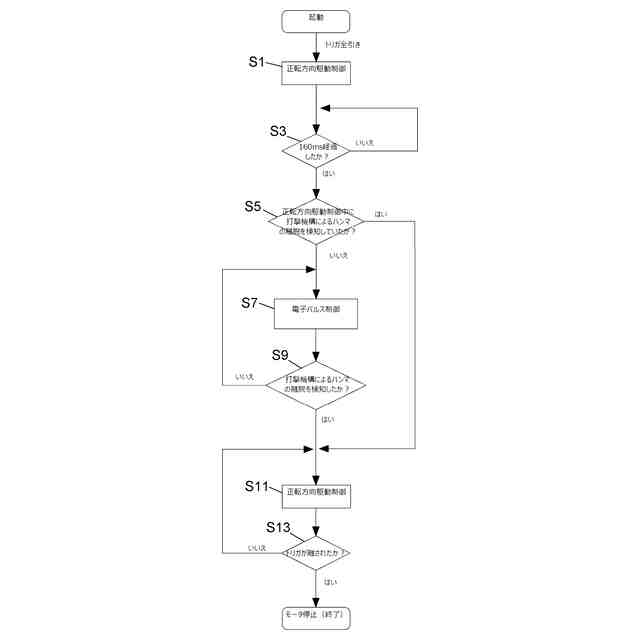
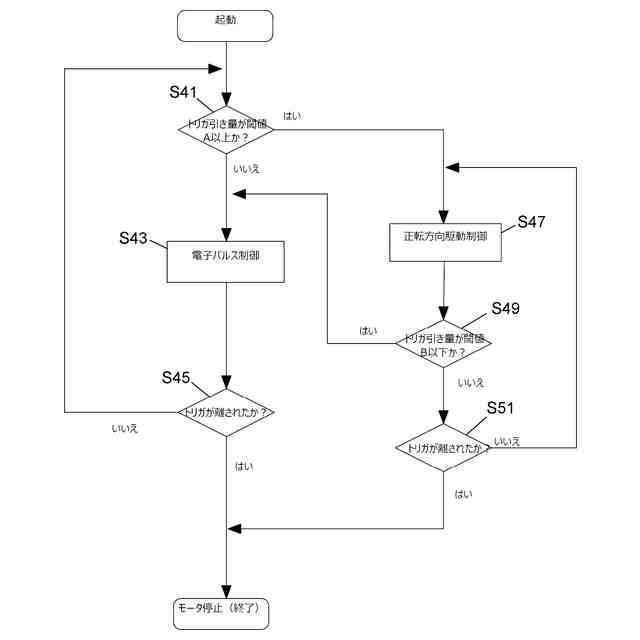
作業機1の第1制御例のフローチャート。
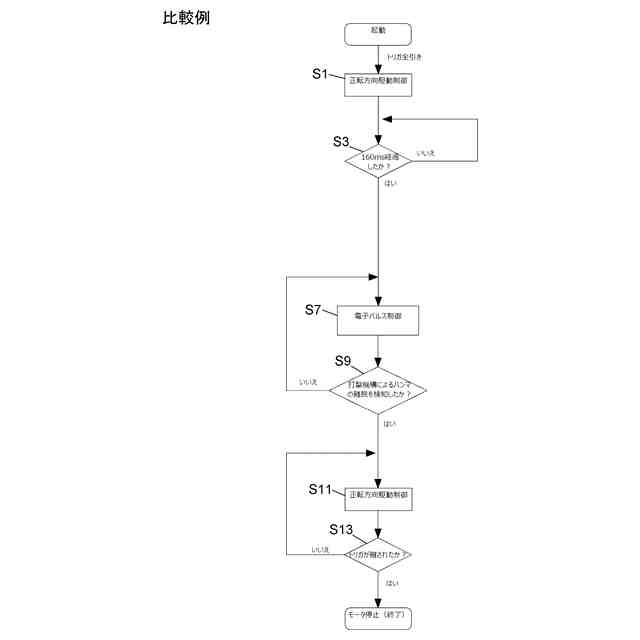
作業機1の比較制御例のフローチャート。
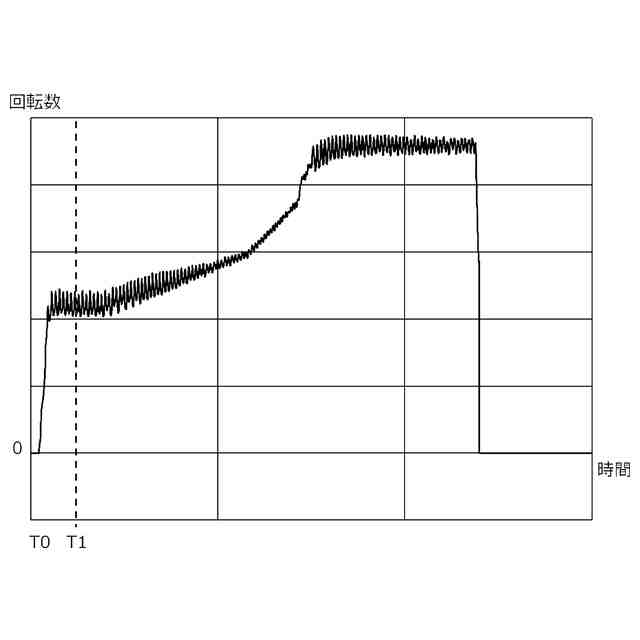
第1制御例を実行した場合のモータ回転数の時間変化の一例を示すグラフ。
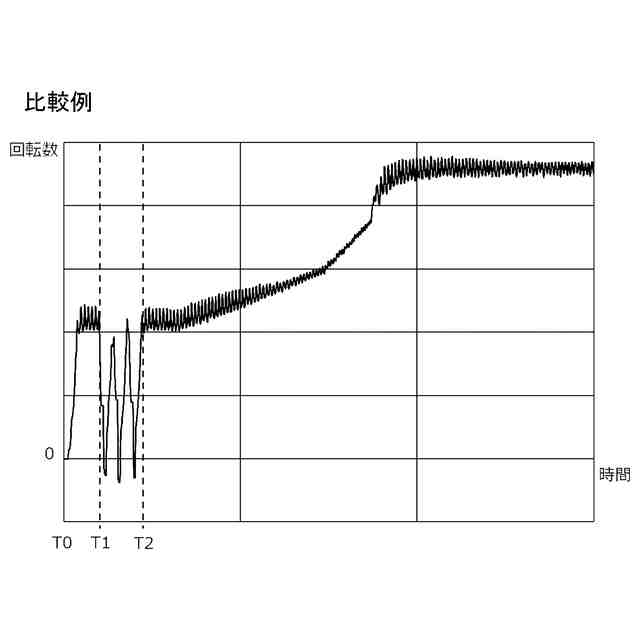
比較制御例を実行した場合のモータ回転数の時間変化の一例を示すグラフ。
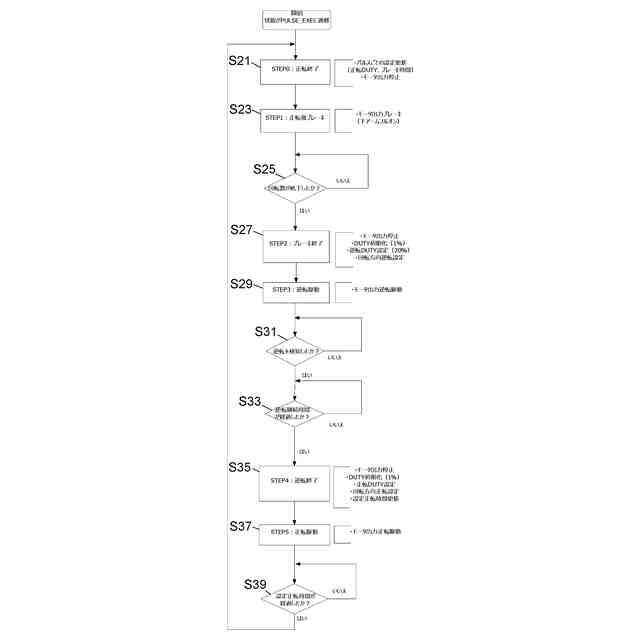
図3の電子パルス制御(S7)の具体例を示すフローチャート。
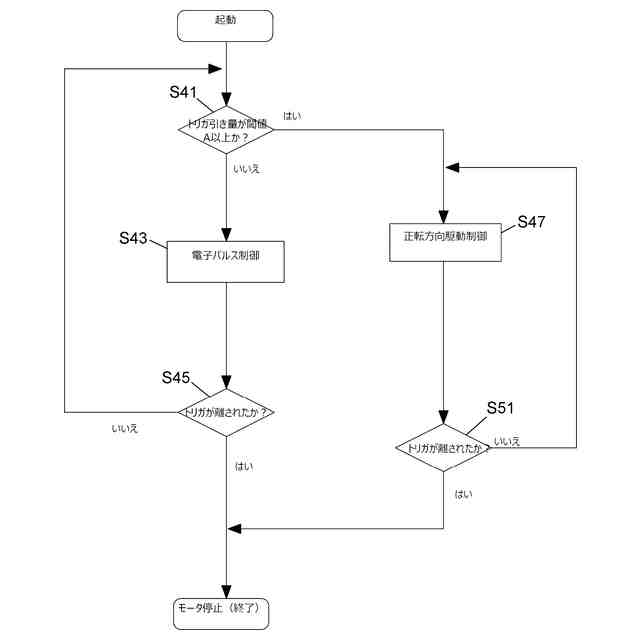
作業機1の第2制御例のフローチャート。
作業機1の第3制御例のフローチャート。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
13日前
株式会社三協システム
製函機
11日前
CKD株式会社
把持装置
12日前
株式会社三協システム
移載装置
10日前
株式会社不二越
ロボットシステム
24日前
株式会社不二越
ロボット操作装置
18日前
SMC株式会社
着脱装置
11日前
株式会社ミクロブ
把持装置
12日前
太陽パーツ株式会社
アシストスーツ
13日前
日本精工株式会社
締結用工具
27日前
ARMA株式会社
ジョイントフレーム
25日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
工機ホールディングス株式会社
作業機
2か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
エッジ仕上げ装置
2日前
株式会社不二越
ロボットシステム
10日前
株式会社不二越
ロボットシステム
13日前
積水ハウス株式会社
フィルム除去具
1か月前
株式会社不二越
垂直多関節ロボット
3日前
トヨタ自動車株式会社
歩行ロボット
16日前
ライオン株式会社
移載システム
4日前
ダイハツ工業株式会社
移載治具
25日前
大和ハウス工業株式会社
ねじ回転工具
11日前
株式会社不二越
協働ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
1か月前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
11日前
セイコーエプソン株式会社
ロボット
20日前
セイコーエプソン株式会社
ロボット
24日前
シヤチハタ株式会社
マーキング装置
16日前
セイコーエプソン株式会社
ロボット
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2日前
シヤチハタ株式会社
マーキング装置
16日前
セコム株式会社
ロボット
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ