TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025081897
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023194967
出願日
2023-11-16
発明の名称
関節機構
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
17/02 20060101AFI20250521BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】関節部の制御性を良好にしつつ、関節部の屈曲範囲を広げること。
【解決手段】関節機構は、根元側に配置され回転可能な第1回転軸と、先端側に配置され回転可能な第2回転軸と、第1及び第2回転軸を、第1及び第2連結部材により連結すると共に、相互に直交するピッチ軸、ヨー軸及びロール軸周りに回転しつつ第1回転軸からの回転を第2回転軸に伝達する関節部と、を備える。第1及び第2連結部材は相対回転可能に直列に連結されている。第1回転軸及び第2回転軸のうち一方は、伸縮機構により伸縮可能なように構成されている。第1回転軸の中心軸線と第2回転軸の中心軸線との交点は、ピッチ軸、ヨー軸及びロール軸の交点と一致するように第1及び第2連結部材は配置されている。
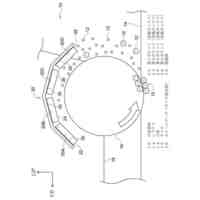
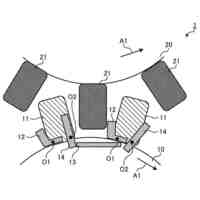
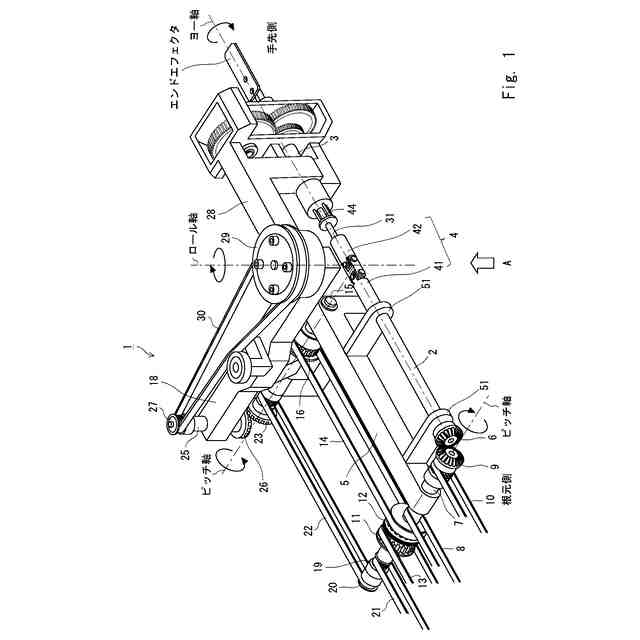
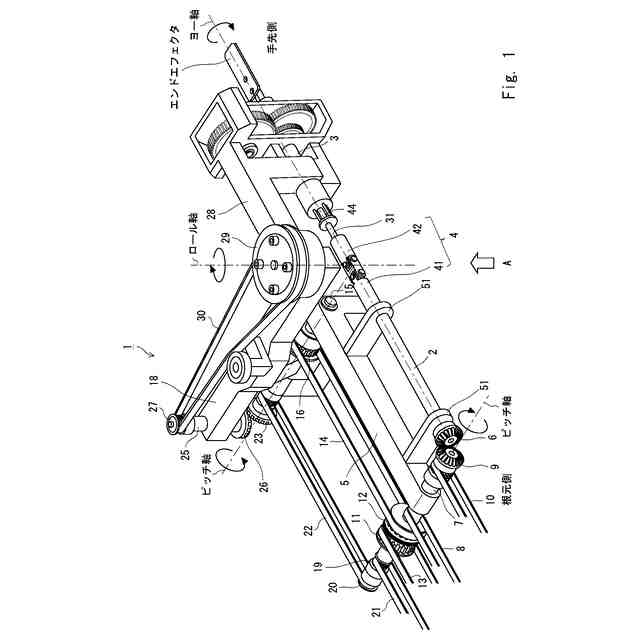
【選択図】図1
特許請求の範囲
【請求項1】
根元側に配置され回転可能な第1回転軸と、
先端側に配置され回転可能な第2回転軸と、
前記第1及び第2回転軸を、第1及び第2連結部材により連結すると共に、相互に直交するピッチ軸、ヨー軸及びロール軸周りに回転しつつ前記第1回転軸からの回転を前記第2回転軸に伝達する関節部と、
を備え、
前記第1及び第2連結部材は相対回転可能に直列に連結されており、
前記第1回転軸及び第2回転軸のうち一方は、伸縮機構により伸縮可能なように構成され、
前記第1回転軸の中心軸線と前記第2回転軸の中心軸線との交点は、前記ピッチ軸、ヨー軸及びロール軸の交点と一致するように前記第1及び第2連結部材は配置されている、
関節機構。
続きを表示(約 790 文字)
【請求項2】
請求項1記載の関節機構であって、
前記第2回転軸は、
前記第2連結部材の中心軸線に対して、前記関節部の屈曲方向に所定角度だけオフセットしたオフセット軸を有しており、
該オフセット軸の中心軸は、前記第1及び第2連結部材の屈曲中心を通る、
関節機構。
【請求項3】
請求項1又は2記載の関節機構であって、
前記第1及び第2連結部材が夫々可動範囲内の任意の屈曲角度となるときに、前記第1回転軸の中心軸線と前記第2回転軸の中心軸線との交点が、前記ピッチ軸、ヨー軸及びロール軸の交点と一致するように、前記第1及び第2連結部材が配置されている、
関節機構。
【請求項4】
請求項1又は2記載の関節機構であって、
前記第1回転軸は、伸縮機構により伸縮可能なように構成されている、
関節機構。
【請求項5】
請求項2記載の関節機構であって、
前記第2回転軸は、
後端に前記第2連結部材が連結された回転軸と、
前記回転軸の先端に連結された第1傘歯車と、
該第1傘歯車と噛み合い、前記オフセット軸へ動力を伝達する第2傘歯車と、
前記第1及び第2傘歯車を回転可能に保持する保持部材と、
前記保持部材によって回転可能に保持される前記オフセット軸と、
を有する、
関節機構。
【請求項6】
請求項1又は2記載の関節機構であって、
前記第1及び第2連結部材は、第1及び第2ユニバーサルジョイントである、
関節機構。
【請求項7】
請求項2記載の関節機構であって、
前記関節部は手首関節部であり、
前記所定角度は10degである、
関節機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットなどの関節機構に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
根元側に配置され駆動手段により回転する第1回転軸と、先端側に配置され回転可能な第2回転軸と、第1及び第2回転軸を、ユニバーサルジョイントなどの連結部材により連結すると共に、相互に直交するピッチ軸、ヨー軸及びロール軸周りに回転しつつ第1回転軸からの回転を第2回転軸に伝達する関節部と、を備える関節機構が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2003-170381号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記関節機構においては、関節部の回転軸が3軸直交であり制御性が良好であるが、1つの連結部材により関節部を屈曲させているため、屈曲範囲が狭いという問題がある。
【0005】
本発明は、このような問題点を解決するためになされたものであり、関節部の制御性を良好にしつつ、関節部の屈曲範囲を広げることができる関節機構を提供することを主たる目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するための本発明の一態様は、
根元側に配置され回転可能な第1回転軸と、
先端側に配置され回転可能な第2回転軸と、
前記第1及び第2回転軸を、第1及び第2連結部材により連結すると共に、相互に直交するピッチ軸、ヨー軸及びロール軸周りに回転しつつ前記第1回転軸からの回転を前記第2回転軸に伝達する関節部と、
を備え、
前記第1及び第2連結部材は相対回転可能に直列に連結されており、
前記第1回転軸及び第2回転軸のうち一方は、伸縮機構により伸縮可能なように構成され、
前記第1回転軸の中心軸線と前記第2回転軸の中心軸線との交点は、前記ピッチ軸、ヨー軸及びロール軸の交点と一致するように前記第1及び第2連結部材は配置されている、
関節機構
である。
この一態様において、
前記第2回転軸は、
前記第2連結部材の中心軸線に対して、前記関節部の屈曲方向に所定角度だけオフセットしたオフセット軸を有しており、
該オフセット軸の中心軸は、前記第1及び第2連結部材の屈曲中心を通っていてもよい。
この一態様において、
前記第1及び第2連結部材が夫々可動範囲内の任意の屈曲角度となるときに、前記第1回転軸の中心軸線と前記第2回転軸の中心軸線との交点が、前記ピッチ軸、ヨー軸及びロール軸の交点と一致するように、前記第1及び第2連結部材が配置されていてもよい。
この一態様において、
前記第1回転軸は、伸縮機構により伸縮可能なように構成されていてもよい。
この一態様において、
前記第2回転軸は、
後端に前記第2連結部材が連結された回転軸と、
前記回転軸の先端に連結された第1傘歯車と、
該第1傘歯車と噛み合い、前記オフセット軸へ動力を伝達する第2傘歯車と、
前記第1及び第2傘歯車を回転可能に保持する保持部材と、
前記保持部材によって回転可能に保持される前記オフセット軸と、
を有していてもよい。
この一態様において、
前記第1及び第2連結部材は、第1及び第2ユニバーサルジョイントであってもよい。
この一態様において、
前記関節部は手首関節部であり、
前記所定角度は10degであってもよい。
【発明の効果】
【0007】
本発明によれば、関節部の制御性を良好にしつつ、関節部の屈曲範囲を広げることができる関節機構を提供することができる。
【図面の簡単な説明】
【0008】
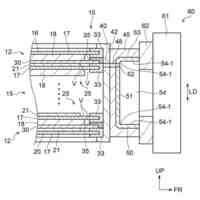
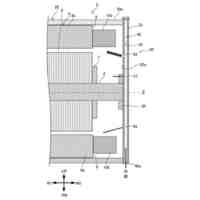
本実施形態に係るマニュピュレータの概略的構成を示す図である。
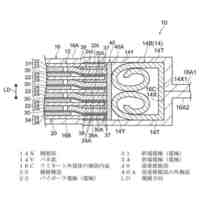
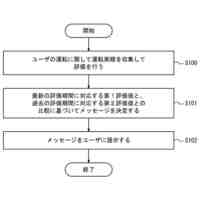
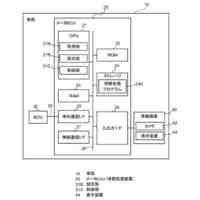
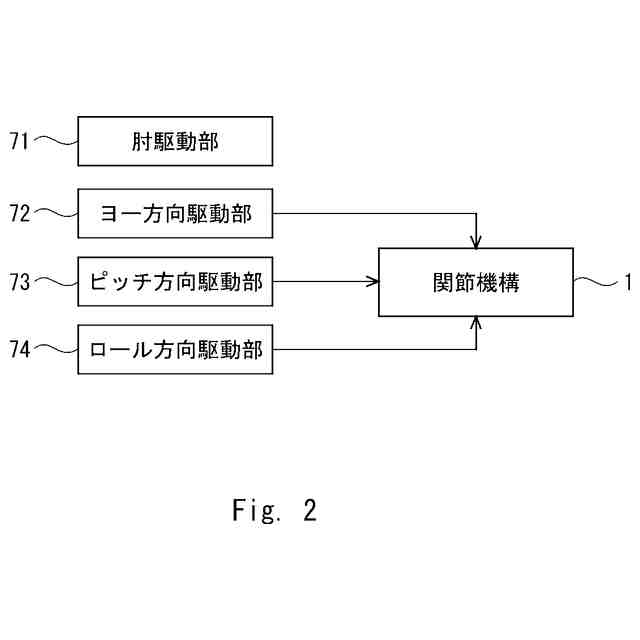
本実施形態に係るマニュピュレータの概略的なシステム構成を示すブロック図である。
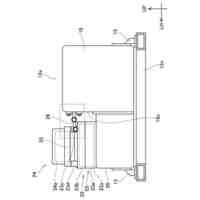
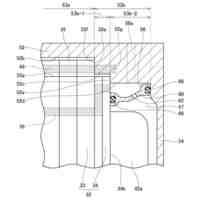
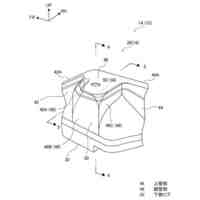
図1に示す手首関節部をA方向から見た図である。
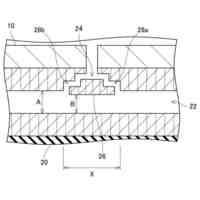
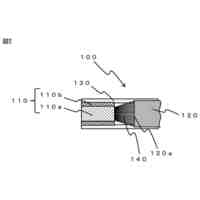
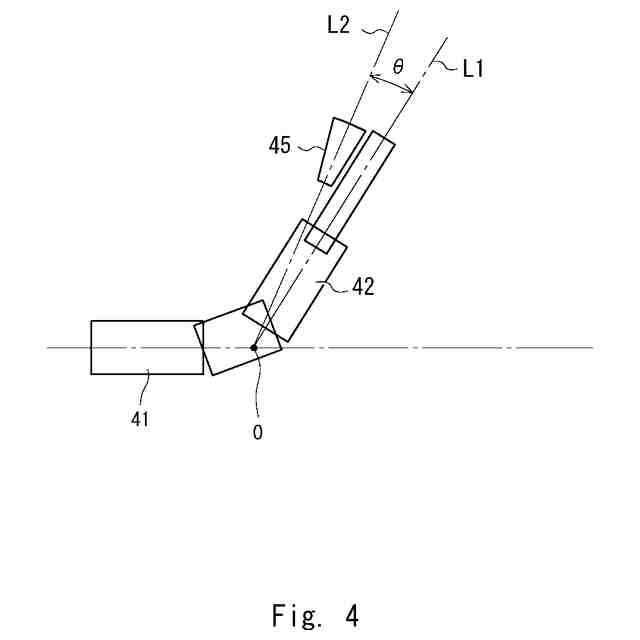
、第2ユニバーサルジョイントの中心軸線に対して手首関節部の屈曲方向に所定角度θだけオフセットしたオフセット軸を示す図である。
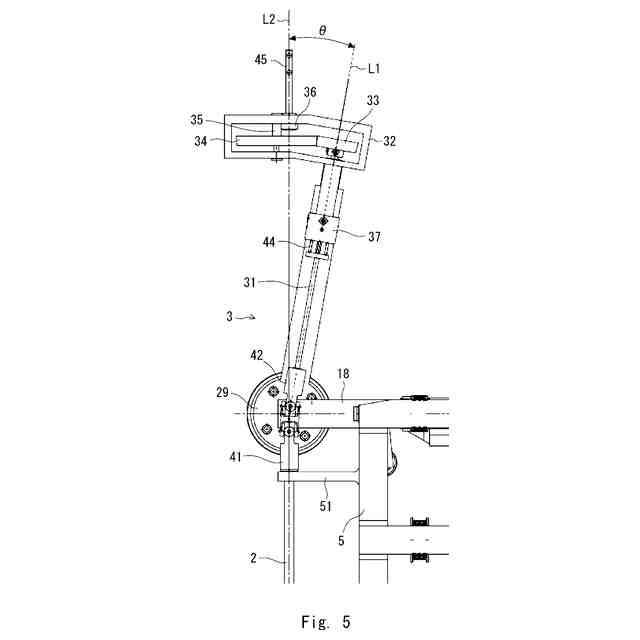
本実施形態に係るオフセット軸の具体例を示す図である。
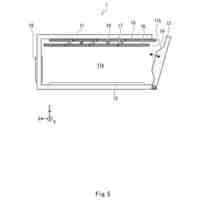
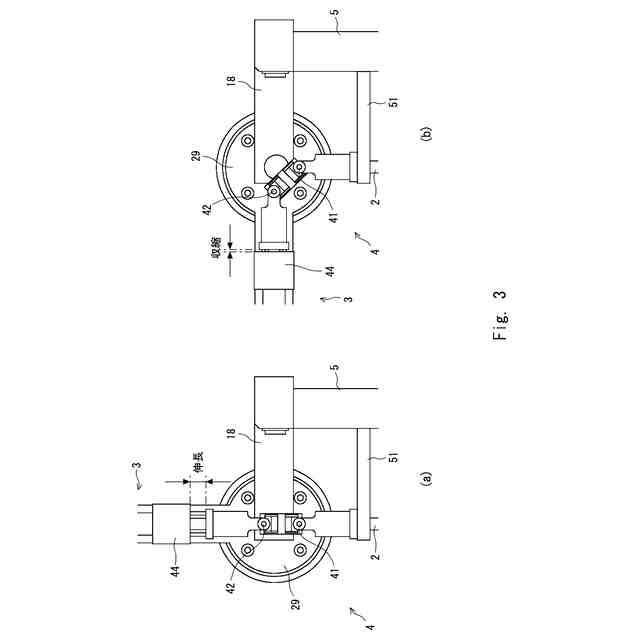
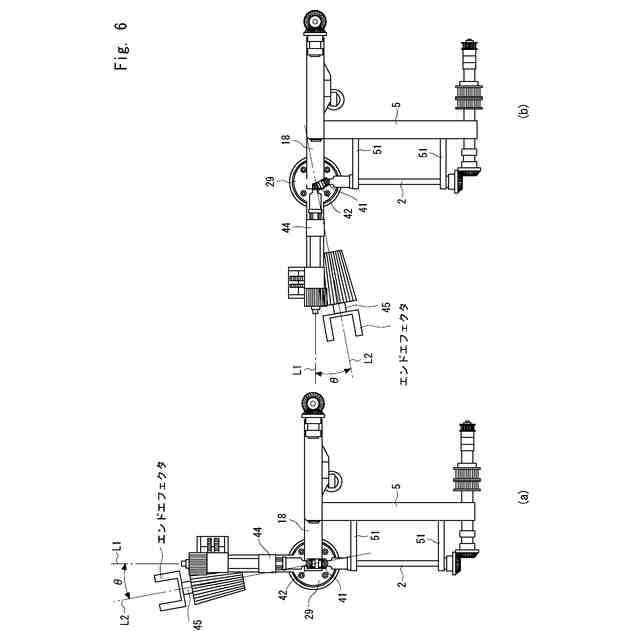
本実施形態に係る手首関節部がロール軸周りに屈曲する状態を示す図である。
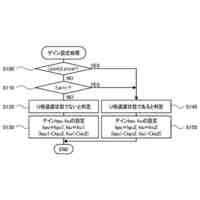
第2ユニバーサルジョイントの中心軸の角度に応じたオフセット軸の角度を示す図である。
【発明を実施するための形態】
【0009】
実施形態1
以下、発明の実施形態を通じて本発明を説明するが、特許請求の範囲に係る発明を以下の実施形態に限定するものではない。また、実施形態で説明する構成の全てが課題を解決するための手段として必須であるとは限らない。
【0010】
図1は、本実施形態に係るマニュピュレータの概略的構成を示す図である。図2は、本実施形態に係るマニュピュレータの概略的なシステム構成を示すブロック図である。本実施形態に係る関節機構1は、物体などを操作するマニュピュレータの関節として構成されている。なお、図1に示す関節機構1は、ロボットの左手を想定した構造であるが、右手についても左手と同様に構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
トヨタ自動車株式会社
電池
6日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
電池
今日
トヨタ自動車株式会社
ロータ
今日
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
電動車
今日
トヨタ自動車株式会社
ロータ
5日前
トヨタ自動車株式会社
モータ
5日前
トヨタ自動車株式会社
モータ
6日前
トヨタ自動車株式会社
モータ
今日
トヨタ自動車株式会社
蓄電装置
今日
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
着磁装置
5日前
トヨタ自動車株式会社
収容装置
5日前
トヨタ自動車株式会社
月面車両
5日前
トヨタ自動車株式会社
燃料電池
3日前
トヨタ自動車株式会社
端末装置
5日前
トヨタ自動車株式会社
車体構造
3日前
トヨタ自動車株式会社
集電端子
5日前
トヨタ自動車株式会社
ギア構造
4日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
プログラム
今日
トヨタ自動車株式会社
電池パック
3日前
トヨタ自動車株式会社
防音カバー
5日前
トヨタ自動車株式会社
電池パック
4日前
トヨタ自動車株式会社
配達システム
4日前
トヨタ自動車株式会社
制振制御装置
5日前
トヨタ自動車株式会社
制動制御装置
3日前
トヨタ自動車株式会社
車両査定装置
4日前
トヨタ自動車株式会社
車両側部構造
今日
トヨタ自動車株式会社
情報処理装置
6日前
トヨタ自動車株式会社
車線推定装置
3日前
トヨタ自動車株式会社
情報処理装置
3日前
トヨタ自動車株式会社
給電支援装置
3日前
トヨタ自動車株式会社
車両制御装置
4日前
トヨタ自動車株式会社
情報処理装置
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ