TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025091153
公報種別
公開特許公報(A)
公開日
2025-06-18
出願番号
2023206227
出願日
2023-12-06
発明の名称
ハンド装置
出願人
オークラ輸送機株式会社
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20250611BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】多様な寸法の物品に対応可能で、構成を簡素化できるハンド装置を提供する。
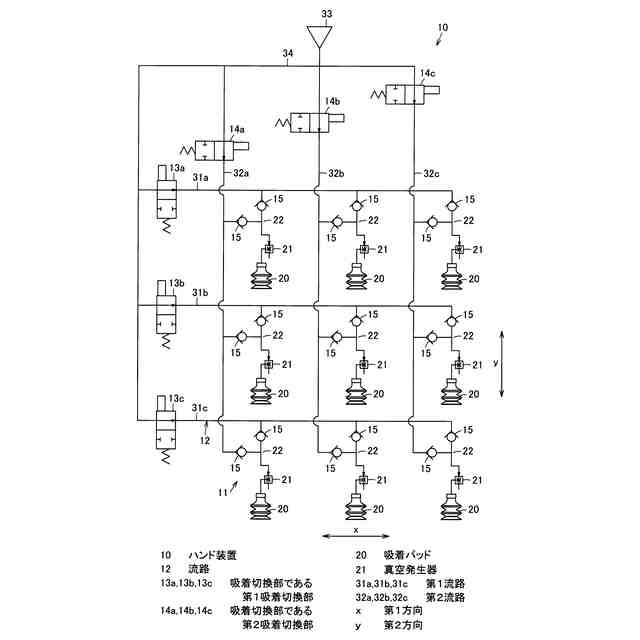
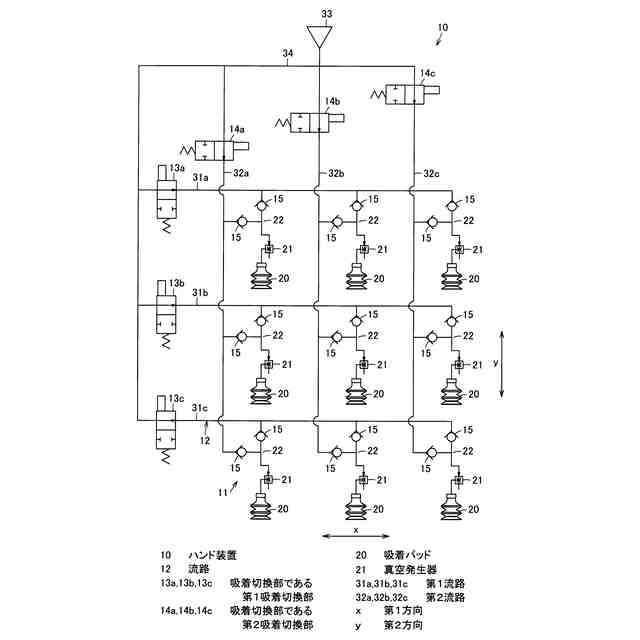
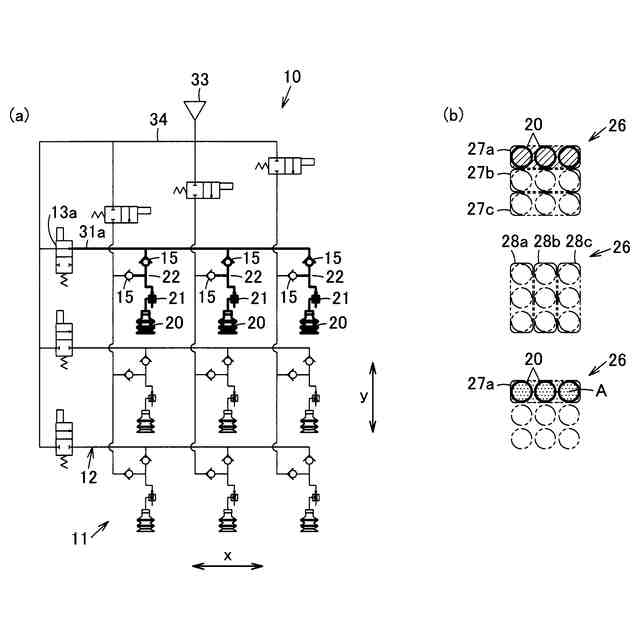
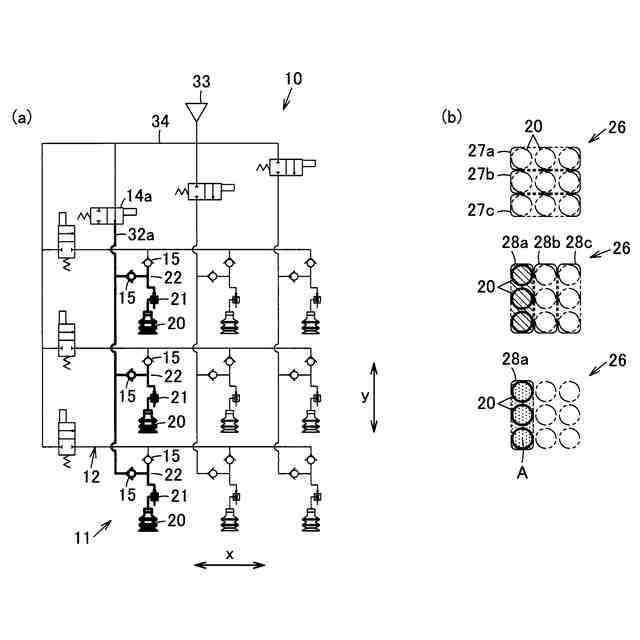
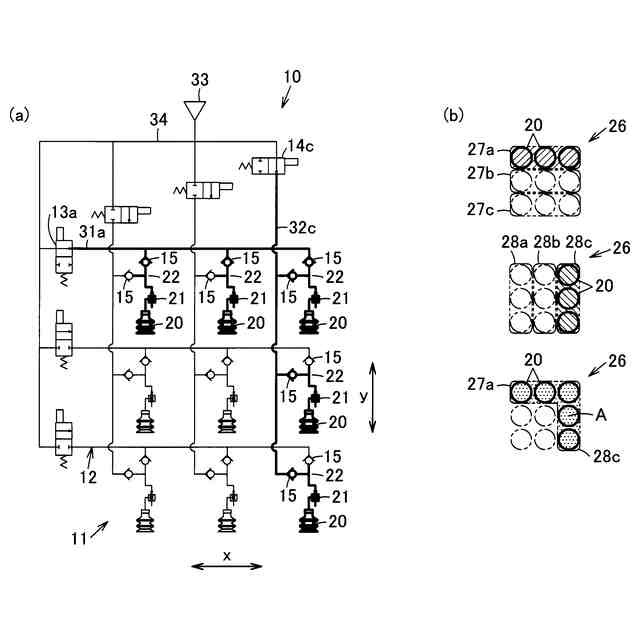
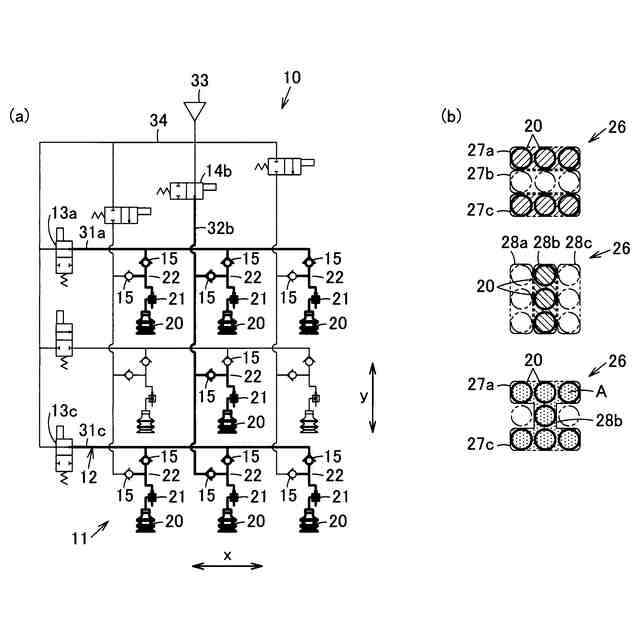
【解決手段】複数の吸着パッド20を所定の吸着パッド数毎に区分して、複数の第1区分の吸着面ゾーンと、第1区分とは異なる複数の第2区分の吸着面ゾーンとを形成する。第1区分の吸着面ゾーンと第2区分の吸着面ゾーンとの両方の吸着面ゾーンに含まれる吸着パッド20に対応するエジェクタ21には、第1区分の吸着面ゾーン用の第1流路31a,31b,31cと、第2区分の吸着面ゾーン用の第2流路32a,32b,32cとを接続する。第1吸着切換部13a,13b,13cは、第1流路31a,31b,31cを通じたエジェクタ21へのエアの供給と遮断を切り換える切換動作を行う。第2吸着切換部14a,14b,14cは、第2流路32a,32b,32cを通じたエジェクタ21へのエアの供給と遮断を切り換える切換動作を行う。
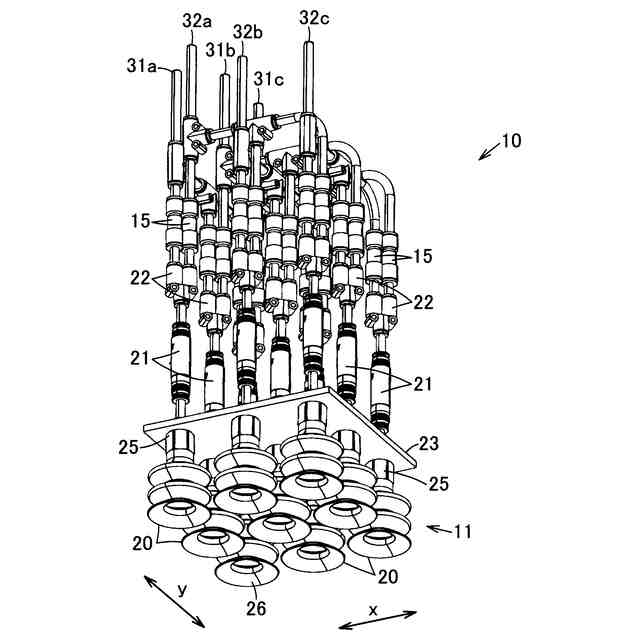
【選択図】図2
特許請求の範囲
【請求項1】
物品の被吸着面を吸着する吸着面を構成する複数の吸着パッドと、
前記吸着パッドに接続され、真空を発生させる真空発生器と、
前記真空発生器に接続された流路を通じた前記真空発生器へのエアの供給と遮断を切り換える切換動作を行う吸着切換部とを備え、
前記複数の吸着パッドを所定の吸着パッド数毎に区分して複数の第1区分の吸着面ゾーンを形成するとともに、前記複数の吸着パッドを所定の吸着パッド数毎に区分して前記第1区分とは異なる複数の第2区分の吸着面ゾーンを形成し、
前記第1区分の吸着面ゾーンと前記第2区分の吸着面ゾーンとの両方の吸着面ゾーンに含まれる前記吸着パッドに対応する前記真空発生器には、前記流路として、前記第1区分の吸着面ゾーン用の第1流路と、前記第2区分の吸着面ゾーン用の第2流路とが接続され、
前記吸着切換部は、前記第1流路に接続された第1吸着切換部と、前記第2流路に接続された第2吸着切換部とを有し、
前記第1吸着切換部と前記第2吸着切換部は、使用する前記吸着面ゾーンに応じて独立して切換動作が可能である
ことを特徴とするハンド装置。
続きを表示(約 730 文字)
【請求項2】
物品の被吸着面を吸着する吸着面を構成する複数の吸着パッドと、
前記吸着パッドに接続され、真空を発生させる真空発生器と、
前記真空発生器に接続された流路を通じた前記真空発生器へのエアの供給と遮断を切り換える切換動作を行う吸着切換部とを備え、
前記複数の吸着パッドを所定の吸着パッド数毎に区分して複数の第1区分の吸着面ゾーンを形成するとともに、前記複数の吸着パッドを所定の吸着パッド数毎に区分して前記第1区分とは異なる複数の第2区分の吸着面ゾーンを形成し、
前記第1区分の吸着面ゾーンと前記第2区分の吸着面ゾーンとの両方の吸着面ゾーンに含まれる前記吸着パッドに対応する前記真空発生器には、前記流路として、前記第1区分の吸着面ゾーン用の第1流路と、前記第2区分の吸着面ゾーン用の第2流路が接続され、
前記吸着切換部は、前記第1流路へのエアの供給を行う第1切換状態と、前記第2流路へのエアの供給を行う第2切換状態と、前記第1流路および前記第2流路へのエアを遮断する第3切換状態とに切換可能である
ことを特徴とするハンド装置。
【請求項3】
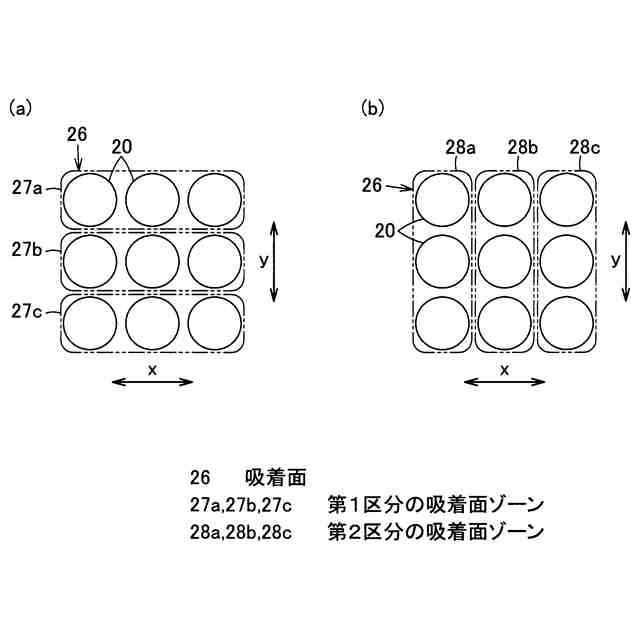
前記吸着面は、前記吸着面の第1方向と前記第1方向に交差する第2方向とに並んで配列される複数の前記吸着パッドで構成され、
前記第1区分の吸着面ゾーンと前記第2区分の吸着面ゾーンとの両方の吸着面ゾーンに含まれる前記吸着パッドは、前記第1方向に並んだ前記吸着パッドからなる前記第1区分の吸着面ゾーンと前記第2方向に並んだ前記吸着パッドからなる前記第2区分の吸着面ゾーンとに含まれる
ことを特徴とする請求項1または2に記載のハンド装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品の被吸着面を吸着保持するハンド装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、物品の天面などの被吸着面を吸着保持し、移載元から移載先に移動させるのに用いられるハンド装置では、例えば下記特許文献1、2などに記載されているように、複数の吸着パッドによって物品の被吸着面を吸着する吸着面を構成し、物品の被吸着面の寸法に応じて吸着面における吸着エリアの変更を可能としたものがある。
【0003】
特許文献1に記載のハンド装置では、各吸着パッドに吸着切換部が接続されており、任意の吸着パッドに対応する吸着切換部を動作させて対応する吸着パッドを有効にすることにより、吸着面の吸着エリアを自在に変更可能としている。
【0004】
また、特許文献2に記載のハンド装置では、吸着面に設置された複数の吸着パッドを区画して吸着ゾーンを形成し、各吸着ゾーンの吸着パッドに接続された吸着切換部を動作させて吸着ゾーン単位で吸着パッドを動作させている。そして、任意の吸着ゾーンを組み合わせて動作させることにより、吸着面の吸着エリアを変更可能としている。
【先行技術文献】
【特許文献】
【0005】
特開2021-8346号公報
特表2022-527869号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかし、特許文献1に記載の構造では、吸着パッドを1つずつ個別に制御できるため、吸着面の吸着エリアを柔軟に変更でき、様々な被吸着面の形状に対応しやすくなるが、吸着パッドの数だけ吸着切換部が必要となり、構造が大型化し、コストも増大する。
【0007】
また、特許文献2に記載の構造では、吸着ゾーンの組み合わせのバリエーションが少ないと、吸着エリアと物品の被吸着面の形状が一致しないことがある。この場合、動作中の吸着エリア内に被吸着面と接触していない吸着パッドが存在すると、この接触していない吸着パッドからエアのリークが発生し、リークが発生した吸着パッドを含む吸着ゾーンおよびこの吸着ゾーンを含む吸着エリアの吸着力が低下することになる。
【0008】
本発明が解決しようとする課題は、多様な寸法の物品に対応可能で、構成を簡素化できるハンド装置を提供することにある。
【課題を解決するための手段】
【0009】
本発明のハンド装置は、物品の被吸着面を吸着する吸着面を構成する複数の吸着パッドと、前記吸着パッドに接続され、真空を発生させる真空発生器と、前記真空発生器に接続された流路を通じた前記真空発生器へのエアの供給と遮断を切り換える切換動作を行う吸着切換部とを備え、前記複数の吸着パッドを所定の吸着パッド数毎に区分して複数の第1区分の吸着面ゾーンを形成するとともに、前記複数の吸着パッドを所定の吸着パッド数毎に区分して前記第1区分とは異なる複数の第2区分の吸着面ゾーンを形成し、前記第1区分の吸着面ゾーンと前記第2区分の吸着面ゾーンとの両方の吸着面ゾーンに含まれる前記吸着パッドに対応する前記真空発生器には、前記流路として、前記第1区分の吸着面ゾーン用の第1流路と、前記第2区分の吸着面ゾーン用の第2流路とが接続され、前記吸着切換部は、前記第1流路に接続された第1吸着切換部と、前記第2流路に接続された第2吸着切換部とを有し、前記第1吸着切換部と前記第2吸着切換部は、使用する前記吸着面ゾーンに応じて独立して切換動作が可能である。
【発明の効果】
【0010】
本発明によれば、多様な寸法の物品に対応可能で、構成を簡素化できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
17日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ジャノメ
ロボット
6日前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
10日前
株式会社ダイヘン
搬送装置
10日前
住友重機械工業株式会社
教示装置
3日前
川崎重工業株式会社
ロボット
4日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
3日前
工機ホールディングス株式会社
作業機
3日前
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
10日前
住友重機械工業株式会社
支援装置
10日前
ホシデン株式会社
分解用治具
10日前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
12日前
オークラ輸送機株式会社
ハンド装置
25日前
株式会社マキタ
電気機器
4日前
川崎重工業株式会社
ロボットシステム
26日前
株式会社リコー
多関節ロボット
1か月前
株式会社リコー
多関節ロボット
10日前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
6日前
工機ホールディングス株式会社
作業機
6日前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社ジャノメ
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































