TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104606
公報種別
公開特許公報(A)
公開日
2025-07-10
出願番号
2023222515
出願日
2023-12-28
発明の名称
教示装置
出願人
住友重機械工業株式会社
代理人
個人
主分類
B25J
9/22 20060101AFI20250703BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】摩擦外乱があっても、ロボットアームの先端に加えられる力を精度よく算出する。
【解決手段】教示装置は、先端を備えるロボットアームに取付けられ、当該ロボットアームに加えられた力によるトルクを取得する取得部と、前記ロボットアームの前記先端に加えられる力の方向を指定する指定部と、前記先端が前記方向に移動することを制限する制限部と、前記先端が前記方向に移動することが制限された状態で、前記ロボットアームに力が加えられて前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出する算出部と、前記先端に加えられる力の大きさを記憶する記憶部と、を備える。
【選択図】図3A
特許請求の範囲
【請求項1】
先端を備えるロボットアームに取付けられ、当該ロボットアームに加えられた力によるトルクを取得する取得部と、
前記ロボットアームの前記先端に加えられる力の方向を指定する指定部と、
前記先端が前記方向に移動することを制限する制限部と、
前記先端が前記方向に移動することが制限された状態で、前記ロボットアームに力が加えられて前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出する算出部と、
前記先端に加えられる力の大きさを記憶する記憶部と、
を備える教示装置。
続きを表示(約 1,900 文字)
【請求項2】
前記制限部は、前記先端が前記方向以外の他方向には自由に移動することができるように、前記先端が前記方向にのみ移動することを制限し、
前記記憶部は、前記先端が前記方向に移動することが制限された状態で、前記他方向に移動する前記先端の位置を記憶する、
請求項1に記載の教示装置。
【請求項3】
前記記憶部には、前記先端を移動させる軌跡のデータが記憶され、
前記軌跡のデータに基づいて、前記先端が前記軌跡に沿って移動するように前記ロボットアームを制御する制御部を更に備え、
前記算出部は、前記先端が前記軌跡に沿って移動している間に前記ロボットアームに力が加えられて前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出し、
前記記憶部は、前記先端が前記軌跡に沿って移動している間に算出された前記先端に加えられる力の大きさを記憶する、
請求項1又は請求項2に記載の教示装置。
【請求項4】
前記力の大きさを算出すること指示する指示部を更に備え、
前記指定部は、前記先端の位置を更に指定し、
前記制限部は、前記先端が前記位置から移動することを更に制限し、
前記算出部は、前記先端が前記位置から移動することが更に制限された状態で、前記ロボットアームに力が加えられ且つ前記指示部により前記指示がされたときに前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出し、
前記記憶部は、前記指示部により前記指示がされたときに算出された前記先端に加えられる力の大きさを記憶する、
請求項1に記載の教示装置。
【請求項5】
前記指示部による前記指示の態様は、前記指示の影響が前記ロボットアームの移動に及ばない態様である、請求項4に記載の教示装置。
【請求項6】
前記ロボットアームの前記先端は、対象物の一部を前記方向に移動させ、
前記対象物は、前記一部が移動されると前記一部が元の位置に戻るように、構成され、
前記算出部は、前記先端が前記方向に移動することが制限されると共に、前記ロボットアームに力が加えられて前記先端が前記対象物の前記一部を移動させて停止した状態で、前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出し、
前記記憶部は、前記先端が前記対象物前記の一部を移動させて停止した状態で算出された前記先端に加えられる力の大きさを記憶する、
請求項1に記載の教示装置。
【請求項7】
前記対象物の一端側が回転軸に回転可能に取り付けられ、
前記先端は、前記対象物の他端側を、前記回転軸を中心として円弧軌道に沿って移動させ、
前記指定部は、前記方向として、前記円弧軌道に沿った方向を指定し、
前記対象物は、前記他端側が前記円弧軌道に沿った方向に移動されると前記他端側が元の位置に戻るように、構成され、
前記算出部は、前記先端が前記円弧軌道に沿った方向に移動することが制限されると共に、前記ロボットアームに力が加えられて前記先端が前記対象物の前記他端側を前記円弧軌道に沿った方向に移動させて停止した状態で、前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出し、
前記記憶部は、前記先端が前記円弧軌道に沿った方向に移動することが制限され且つ前記先端が前記対象物の前記他端側を移動させて停止した状態で算出された前記先端に加えられる力の大きさを記憶する、
請求項6に記載の教示装置。
【請求項8】
前記ロボットアームの前記先端は、曲面を備える対象物の前記曲面に沿って移動され、 前記指定部は、前記先端が位置する前記曲面の各位置における法線の方向を前記方向として指定する、
請求項1に記載の教示装置。
【請求項9】
前記記憶部に記憶される前記先端に加えられる力の大きさを変更する変更部を更に備える、請求項1に記載の教示装置。
【請求項10】
前記ロボットアームは、関節を備え、
前記関節には、前記ロボットアームを移動させるモータが備えられ、
前記取得部は、前記モータに供給する電流に基づいて、前記トルクを取得する、
請求項1に記載の教示装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示の技術は、教示装置に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
特許文献1には、ロボットアームの先端に取り付けられたツールの物体に対する押し付け力を直接教示するための教示装置が開示される。この教示装置では、ユーザは、ロボットアームを操作して、ロボットアームに取り付けられるツールを物体から離した位置に移動させ、サーボロック指示を教示装置に入力する。サーボロック指示が入力された教示装置は、ロボットアームをサーボロックする。ユーザは、ロボットアームに対して手で力を加える。この際、トルクセンサはロボットアームに加えられた押し付け力によるトルクを検出し、教示装置は、このトルクから、ツールの物体に対する押し付け力を算出し、算出した押し付け力を表示装置に表示する。ユーザは、押し付け力が所望値になった場合、決定指示を教示装置に入力する。決定指示が入力された教示装置は、決定指示が入力された時の押し付け力の値及び方向を記憶部に登録する。
【先行技術文献】
【特許文献】
【0003】
特開2020-116703号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記教示装置では、ロボットアームに加わるトルクに摩擦外乱が加わると、算出された押し付け力に、摩擦外乱の成分が加わり、押し付け力の推定精度が低下し、また加えたい方向以外の方向の外力も外乱の影響で推定されてしまう。特にロボットアームが特異点近傍の姿勢を取る場合、これらの現象が顕著となる。
【0005】
本開示の技術は、上記事実に鑑み成されたもので、摩擦外乱があっても、ロボットアームの先端に加えられる力を精度よく算出することができる教示装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため本開示の技術の態様の教示装置は、先端を備えるロボットアームに取付けられ、当該ロボットアームに加えられた力によるトルクを取得する取得部と、前記ロボットアームの前記先端に加えられる力の方向を指定する指定部と、前記先端が前記方向に移動することを制限する制限部と、前記先端が前記方向に移動することが制限された状態で、前記ロボットアームに力が加えられて前記取得部により取得された前記トルクに基づいて、前記先端に加えられる力の大きさを算出する算出部と、前記先端に加えられる力の大きさを記憶する記憶部と、を備える。
【発明の効果】
【0007】
本開示の技術は、摩擦外乱があっても、ロボットアームの先端に加えられる力を精度よく算出することができる。
【図面の簡単な説明】
【0008】
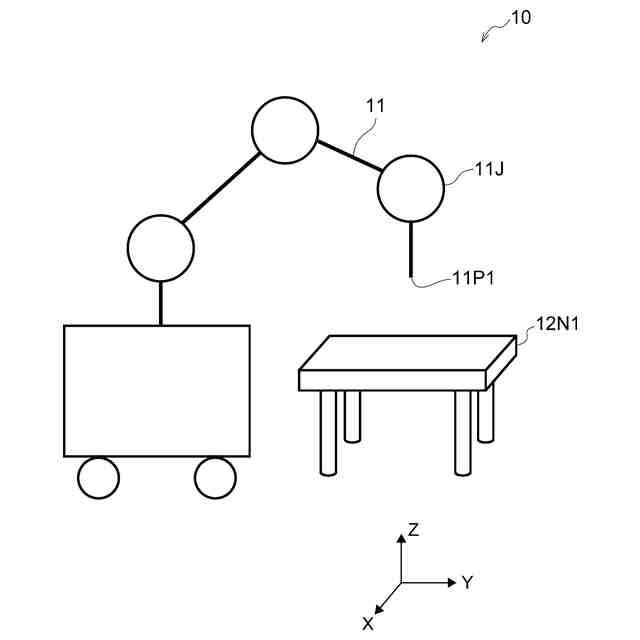
第1の実施の形態の教示装置の構成の一例を示す図である。
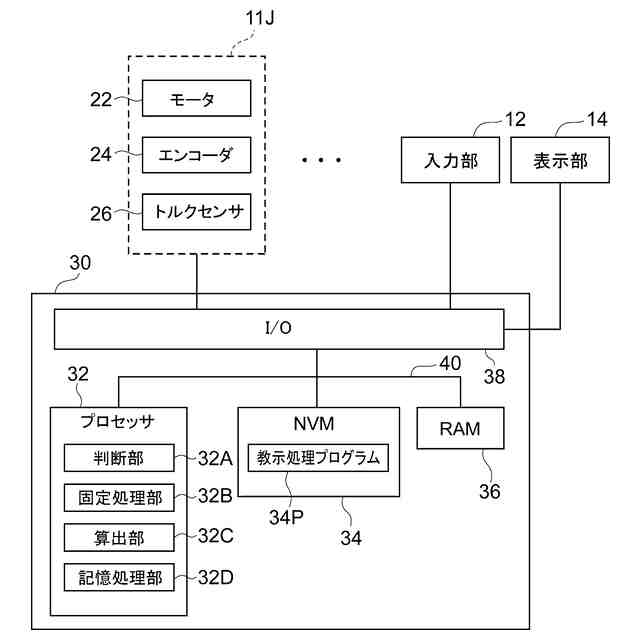
第1の実施の形態の教示装置の制御系の一例を示すブロック図である。
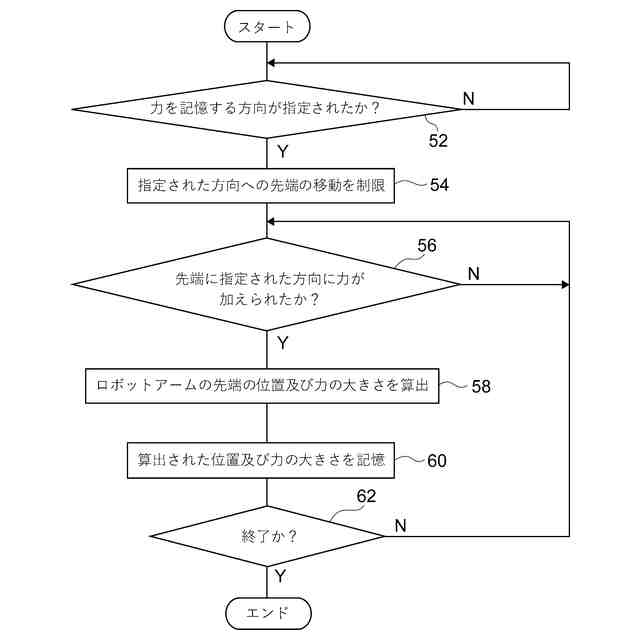
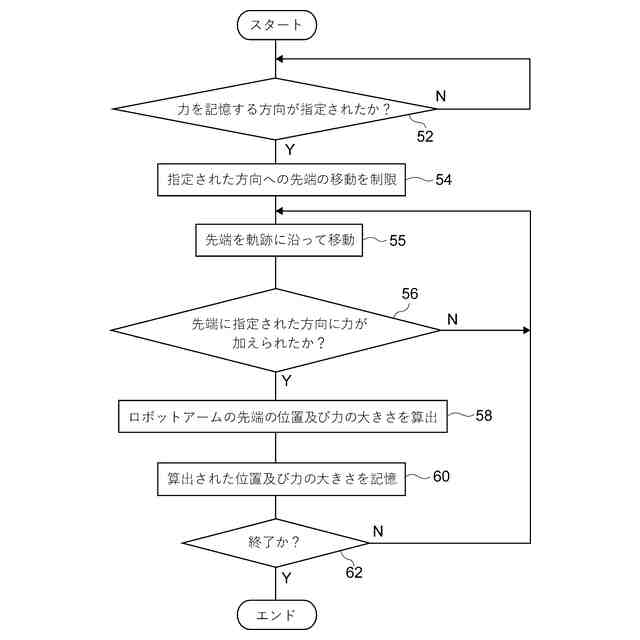
第1の実施の形態の教示装置のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
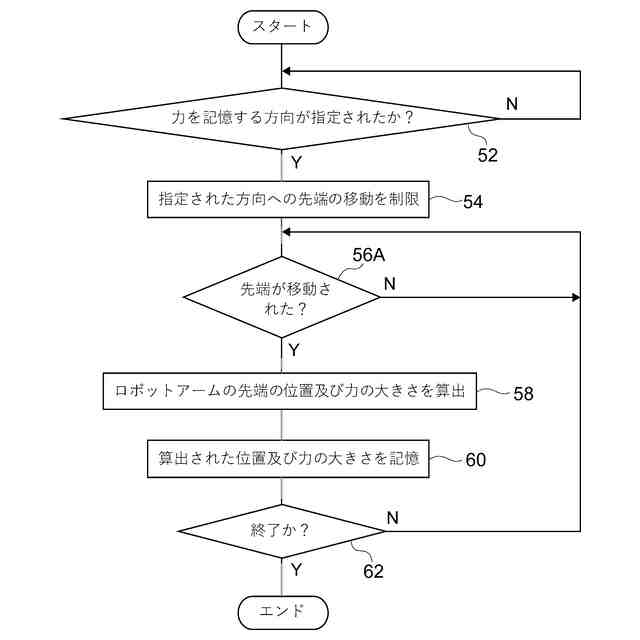
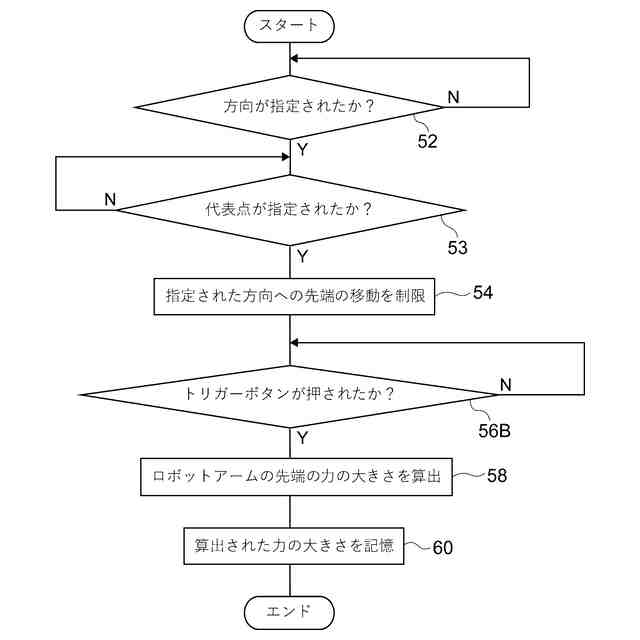
第1の実施の形態の教示装置の第1の変形例のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第1の実施の形態の教示装置の第2の変形例のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
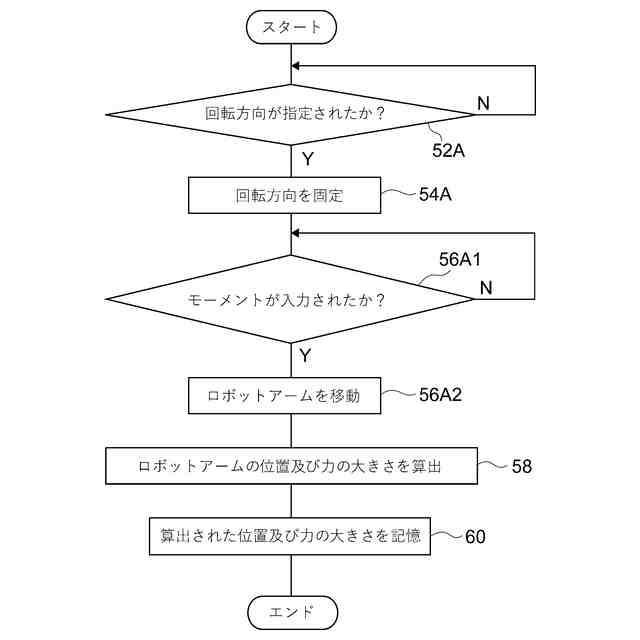
第1の実施の形態の教示装置の第3の変形例のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第2の実施の形態の教示装置の構成の一例を示す図である。
第2の実施の形態の教示装置のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第2の実施の形態の教示装置の第1の変形例のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第2の実施の形態の教示装置の第2の変形例のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第3の実施の形態の教示装置の構成の一例を示す図である。
第3の実施の形態の教示装置のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第4の実施の形態の教示装置の構成の一例を示す図である。
第4の実施の形態の教示装置のプロセッサ32が実行する教示処理プログラムの一例を示すフローチャートである。
第4の実施の形態の教示装置の対象物の曲面の第1の点における力を記憶する方向の一例を示す図である。
第4の実施の形態の教示装置の対象物の曲面の第2の点における力を記憶する方向の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、本開示の技術の実施の形態を説明する。
【0010】
[第1の実施の形態]
(構成)
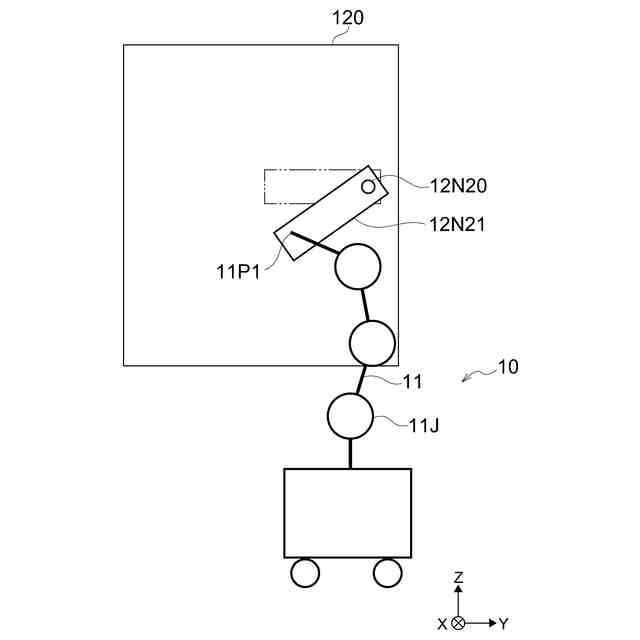
図1は、第1の実施の形態の教示装置10の構成の一例を示す図である。図1に示すように、教示装置10は、対象物12N1に押し付け力を作用させる先端11P1と複数の関節11Jとを備えるロボットアーム11を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ