TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025113045
公報種別
公開特許公報(A)
公開日
2025-08-01
出願番号
2024007668
出願日
2024-01-22
発明の名称
協働ロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/06 20060101AFI20250725BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者を含めた物体の接触によって動作を停止した協働ロボットを再起動させる際の安全性を更に向上させることができる協働ロボットシステムを提供することを目的とする。
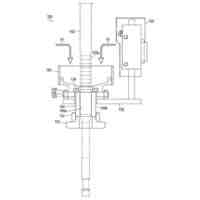
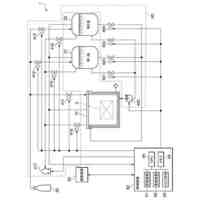
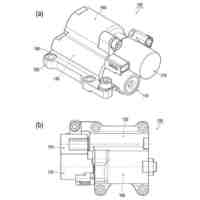
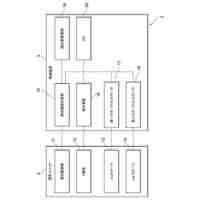
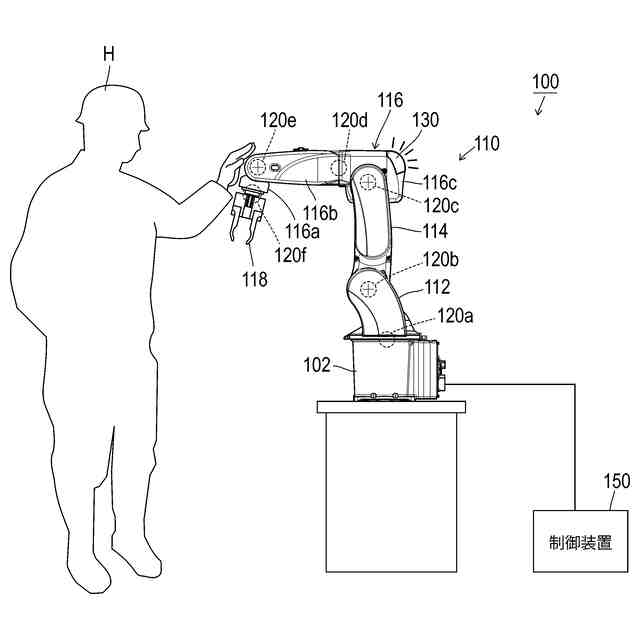
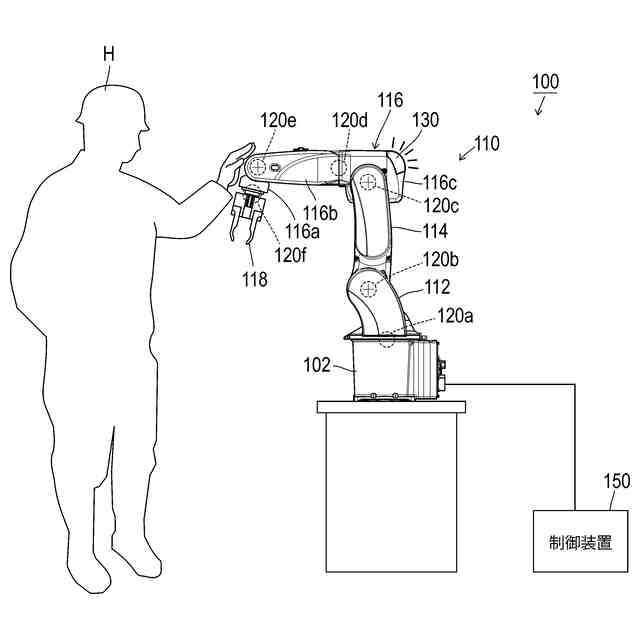
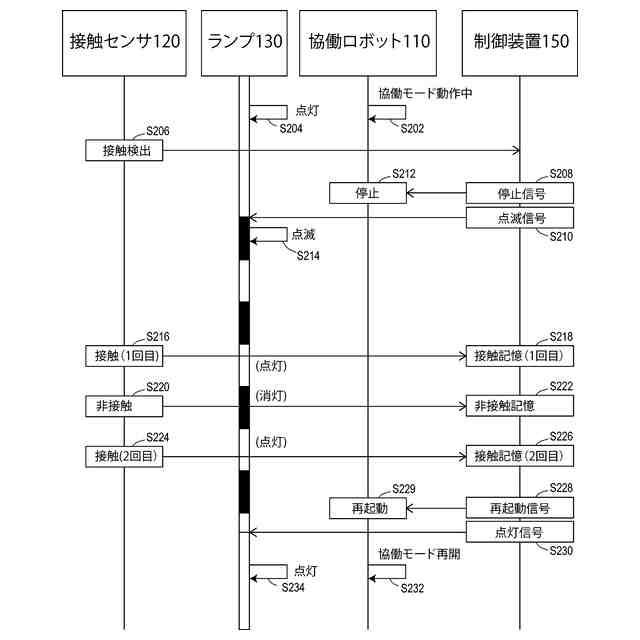
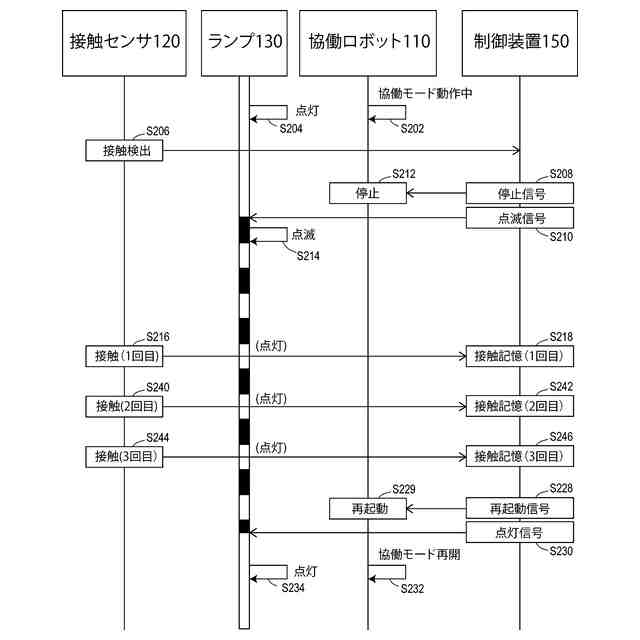
【解決手段】本発明にかかる協働ロボットシステム100の構成は、アームを備え、協働モードまたは非協働モードのいずれかの動作モードで動作する協働ロボット110と、アームに物体が接触したことを検出する接触センサ120と、協働ロボットの動作モードを表示するランプ130と、協働ロボット全体の動作を制御する制御装置150と、を備え、制御装置150は、協働モード中に接触センサ120が接触を検出したら、アームの動作を停止させるとともにランプ130を点滅させ、ランプ130の点滅パターンに合わせた所定のタイミングで接触センサ120が接触を検出したら、協働ロボット110を再起動することを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
アームを備え、協働モードまたは非協働モードのいずれかの動作モードで動作する協働ロボットと、
前記アームに物体が接触したことを検出する接触センサと、
前記協働ロボットの前記動作モードを表示するランプと、
前記協働ロボット全体の動作を制御する制御装置と、
を備え、
前記制御装置は、
前記協働モード中に前記接触センサが接触を検出したら、前記アームの動作を停止させるとともに前記ランプを点滅させ、
前記ランプの点滅パターンに合わせた所定のタイミングで前記接触センサが接触を検出したら、前記協働ロボットを再起動することを特徴とする協働ロボットシステム。
続きを表示(約 560 文字)
【請求項2】
前記接触センサが、前記所定のタイミングの接触を複数回検出したら、前記制御装置は前記協働ロボットを再起動することを特徴とする請求項1に記載の協働ロボットシステム。
【請求項3】
前記接触センサが、前記点滅パターンの中で点灯中に接触を検出し、その点灯の後の消灯中に非接触を検出することが2回以上繰り返されたら、前記制御装置は前記協働ロボットを再起動することを特徴とする請求項1に記載の協働ロボットシステム。
【請求項4】
アームを備え、協働モードまたは非協働モードのいずれかの動作モードで動作する協働ロボットと、
前記アームに物体が接触したことを検出する接触センサと、
前記協働ロボットの前記動作モードを表示するランプと、
前記協働ロボット全体の動作を制御する制御装置と、
を備え、
前記制御装置は、
前記協働モード中に前記接触センサが接触を検出したら、前記アームの動作を停止させるとともに前記ランプを所定の色と該所定の色と異なる色とを所定の点灯パターンで点灯させ、
前記ランプの点灯パターンに合わせた所定のタイミングで前記接触センサが接触を検出したら、前記協働ロボットを再起動することを特徴とする協働ロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、協働モードまたは非協働モードのいずれかの動作モードで動作する協働ロボットを備える協働ロボットシステムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
作業者と作業領域を共有する産業用ロボット、いわゆる協働ロボットでは安全対策が求められる。この安全対策は、本質安全と機能安全に分けることができる。本質安全とは、構造や仕組みとして確保する安全性である。例えば、アーム間の隙間を大きく取ることによって、アームが畳まれたときに作業者の指が挟まれにくい構造を採用することが該当する。機能安全とは、制御によって確保する安全性である。例えば、アームと作業者とが衝突するとロボットが停止することで衝突を防止することが該当する。
【0003】
本質安全は望ましい対策ではあるが、アーム間の隙間を大きく取るなど、ロボットの形状・構造に制約が生じるため、設計自由度が失われるという問題がある。そこで、本質安全で対応できないリスクについて機能安全で対応するロボットを用いて、通常は機能安全による制限のない非協働モードで動作させて、作業者が近づいたら機能安全を実施することが考えられる。
【0004】
例えば特許文献1には、「ロボットアームを備え、該ロボットアームに作業者が近接可能な協働ロボットシステム」が開示されている。特許文献1の協働ロボットシステムは、「上記ロボットアームに取り付けられ、ロボットアームへの作業者の接近を検知する複数の近接センサと、上記ロボットアームの作業手順に従い作業者検知に用いる近接センサを上記複数の近接センサから選択するアーム制御部と」を備えている。
【0005】
特許文献1では、静電容量センサ(近接センサ)は、ロボットアームに作業者が接近したときにロボットアームを停止させるスイッチ、および、停止後に作業者が意図的に再びロボットアームに接触することでロボットアームの作業開始スイッチとなるマンマシンインターフェイスとすることもできるとしている。そしてこの場合、センサ処理部およびアーム制御部は、ロボットアーム1の再起動を図る機能を有するとしている。
【先行技術文献】
【特許文献】
【0006】
国際出願WO2018/131237号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の協働ロボットシステムでは「停止したロボットアームの再起動が可能となり、作業者の作業効率を向上させることができる」としているが、かかる構成であると、作業者が意図することなく再びロボットアームに接触した場合にもロボットアームが再起動してしまう。このため、特許文献1の協働ロボットシステムでは、機能安全が十分に確保できておらず、更なる改善の余地がある。
【0008】
本発明は、このような課題に鑑み、作業者を含めた物体の接触によって動作を停止した協働ロボットを再起動させる際の安全性を更に向上させることができる協働ロボットシステムを提供することを目的としている。
【課題を解決するための手段】
【0009】
上記課題を解決するために、本発明にかかる協働ロボットシステムの代表的な構成は、アームを備え、協働モードまたは非協働モードのいずれかの動作モードで動作する協働ロボットと、アームに物体が接触したことを検出する接触センサと、協働ロボットの動作モードを表示するランプと、協働ロボット全体の動作を制御する制御装置と、を備え、制御装置は、協働モード中に接触センサが接触を検出したら、アームの動作を停止させるとともにランプを点滅させ、ランプの点滅パターンに合わせた所定のタイミングで接触センサが接触を検出したら、協働ロボットを再起動することを特徴とする。
【0010】
上記接触センサが、所定のタイミングの接触を複数回検出したら、制御装置は協働ロボットを再起動するとよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
硬質材料
24日前
株式会社不二越
ロボット
11日前
株式会社不二越
ブローチ盤
24日前
株式会社不二越
アクチュエータ
1か月前
株式会社不二越
熱処理システム
1か月前
株式会社不二越
ノンリーク三方弁
14日前
株式会社不二越
ロボット操作装置
1か月前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
エッジ仕上げ装置
24日前
株式会社不二越
ロボットシステム
1か月前
株式会社不二越
垂直多関節ロボット
25日前
株式会社不二越
複合アクチュエータ
14日前
株式会社不二越
スカイビング加工機
1か月前
株式会社不二越
スカイビング加工機
1か月前
株式会社不二越
斜板式ピストンポンプ
5日前
株式会社不二越
移動ロボットシステム
14日前
株式会社不二越
可変容量制御ピストンポンプ
14日前
株式会社不二越
X線回折測定装置及びプログラム
14日前
株式会社不二越
センサ及びセンサを備えるロボット
1か月前
株式会社不二越
データ修復機能を有する回路システム
1か月前
株式会社不二越
マルテンサイト系ステンレス鋼焼結体
1か月前
株式会社不二越
歯車加工用合金鋼およびそれを用いた歯車
24日前
株式会社不二越
転がり軸受用転動体およびそれを用いた転がり軸受
1か月前
個人
固定補助具
1か月前
個人
折りたたみ工具
1か月前
川崎重工業株式会社
ロボット
12日前
株式会社三協システム
製函機
1か月前
株式会社不二越
ロボット
11日前
株式会社竹中工務店
補助セット
11日前
CKD株式会社
把持装置
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット操作装置
1か月前
川崎重工業株式会社
ハンド
3日前
株式会社不二越
ロボットシステム
1か月前
太陽パーツ株式会社
アシストスーツ
1か月前
株式会社ミクロブ
把持装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ