TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135339
公報種別
公開特許公報(A)
公開日
2025-09-18
出願番号
2024033123
出願日
2024-03-05
発明の名称
垂直多関節ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250910BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モータを精度よく位置決めして、モータを確実に冷却することができる垂直多関節ロボットを提供する。
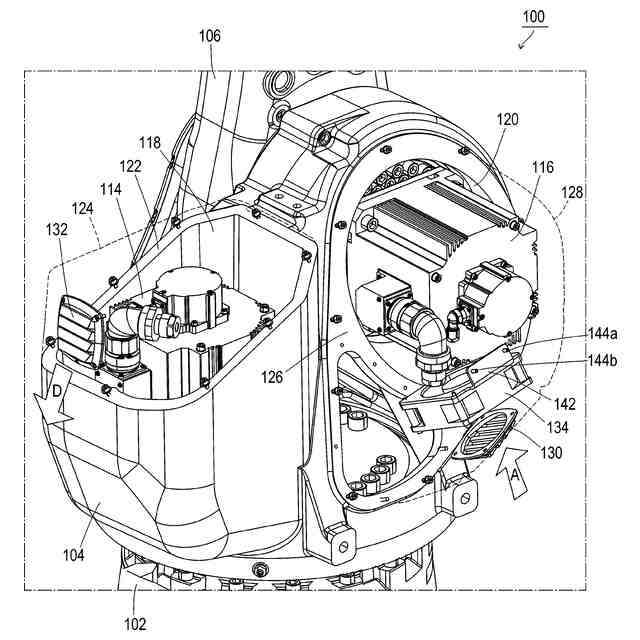
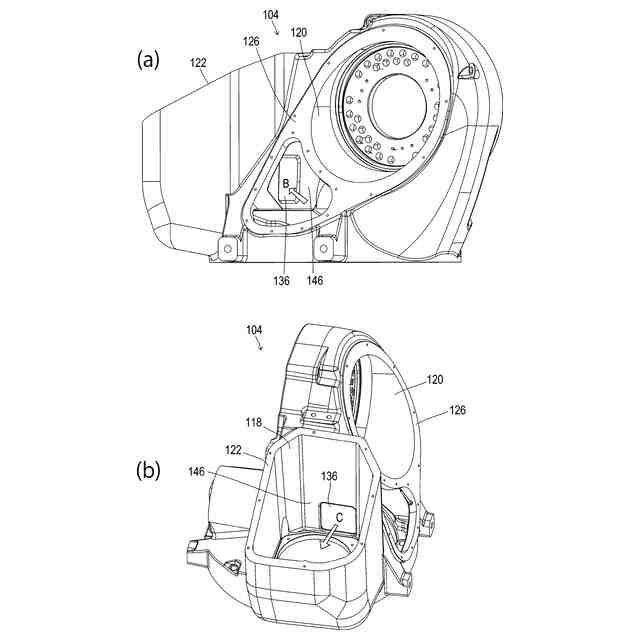
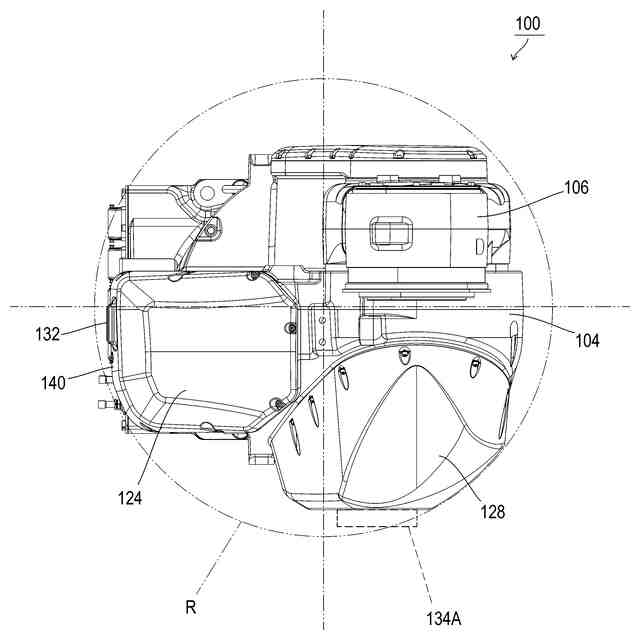
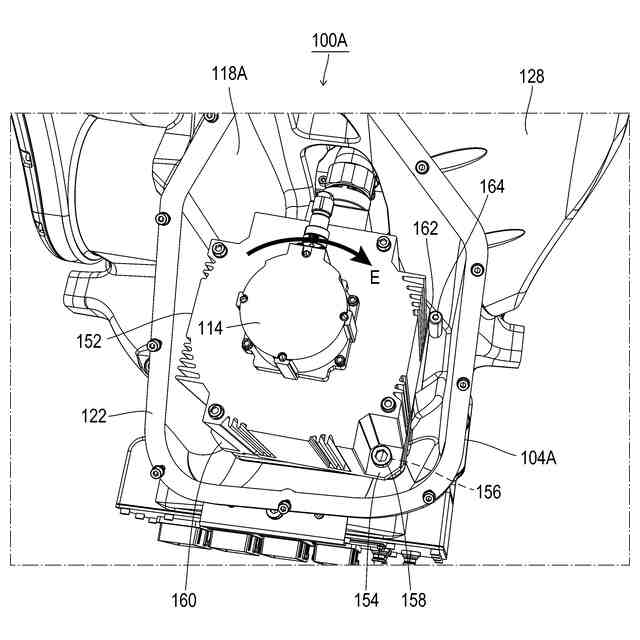
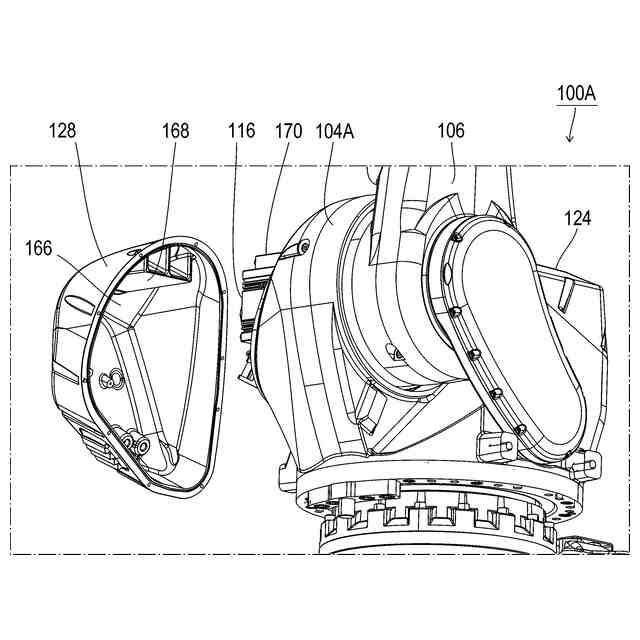
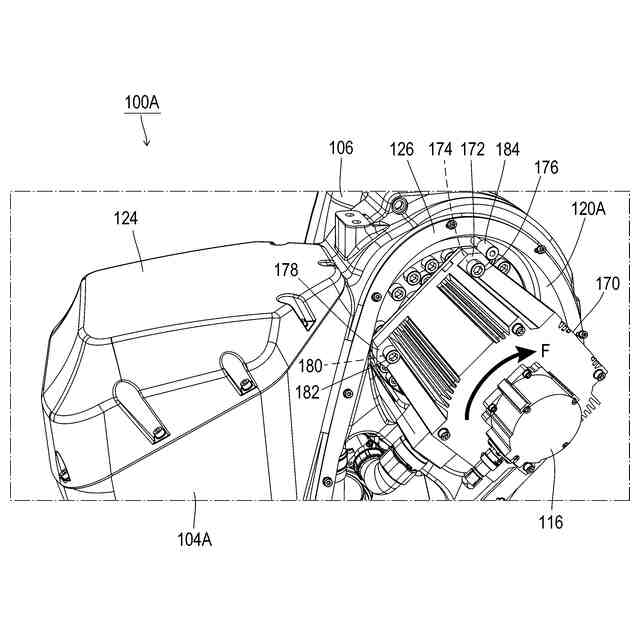
【解決手段】垂直多関節ロボット100Aは、下アームと胴部104Aとを有するロボットであって、下アームまたは胴部104Aを回動させる第1モータ114、第2モータと、胴部の内部に形成されるとともに、第1モータ114、第2モータが収容されて取り付けられる第1モータ室118A、第2モータ室と、第1モータ室の開口122、第2モータ室の開口を覆う第1モータカバー、第2モータカバー128Aと、第1モータカバー、第2モータカバー128Aの内側に設けられ第1モータ114、第2モータの側面、上面に面接触する放熱フィンと、第1モータ室、第2モータ室の内部に立設され第1モータ114、第2モータの回転方向Eの位置を決める位置決めピン164とを備える。
【選択図】図7
特許請求の範囲
【請求項1】
アームと胴部とを有する垂直多関節ロボットであって、
前記アームまたは前記胴部を回動させるモータと、
前記胴部の内部に形成されるとともに、前記モータが収容されて取り付けられるモータ室と、
前記モータ室の開口を覆うモータカバーと、
前記モータカバーの内側に設けられ前記モータの側面に面接触する放熱フィンと、
前記モータ室の内部に立設され前記モータの回転方向の位置を決める位置決めピンと、を備えることを特徴とする垂直多関節ロボット。
続きを表示(約 160 文字)
【請求項2】
前記モータは、モータフランジを介して前記モータ室内に取り付けられていて、
前記位置決めピンは、段付き形状であって、前記モータフランジに対向する位置に形成された小径部と、前記モータの前記側面に対向する位置に形成された大径部とを有することを特徴とする請求項1に記載の垂直多関節ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、アームを有する垂直多関節ロボットに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
垂直多関節ロボットは、産業用ロボットであって、汎用の目的に用いられる。垂直多関節ロボットは、床などに設置される基台と、基台に載置された胴部とを備える。胴部の内部には、基台に対して胴部を回動させるモータ(第1モータ)や、胴部に対してアームを回動させるモータ(第2モータ)などが収容されている。
【0003】
垂直多関節ロボットは5軸や6軸の構成を取ることが多い。すると先端(エンドエフェクタ)寄りのモータよりも基台寄りのモータの方が動作させる質量が大きくなるため、必然的に出力の大きなモータを配置することになる。すると胴部に収容される第1モータや第2モータは出力が大きくなり、発熱も大きくなるため、モータの温度上昇を抑制する必要がある。
【0004】
特許文献1に、ロボットの関節部に用いられる冷却装置が記載されている。この冷却装置は、冷却媒体流路が形成されている冷却媒体流路体と、冷却媒体流路体に接続されている冷却媒体循環流路と、ラジエータおよび送出器(ポンプ)と、ファンとを備える。冷却媒体流路体は、ロボットの関節部の発熱部となるモータに配設されている(液冷)。ラジエータおよび送出器は、冷却媒体循環流路の途中に設けられている。ファンは、ラジエータに設けられていて、ラジエータを冷却するように構成されている。
【0005】
特許文献2に、モータを冷却する冷却構造体を備えた多関節ロボットが記載されている。この多関節ロボットは、可動体を作動させるための動力を発生するモータと、モータを収容するモータハウジングと、モータから発生される熱を散逸させてモータを冷却する冷却構造体とを備える。
【0006】
特許文献2のモータは、側面において熱を発生する発熱面を有する。冷却構造体は、アルミニウムなどの金属から形成された熱伝導体を有する。熱伝導体は、弾性変形可能な熱伝導シートを介してモータの発熱面に接触する第1の接触面と、弾性変形可能な他の熱伝導シートを介してモータハウジングの内表面に接触する第2の接触面とを有し、モータからモータハウジングまで熱を伝達する熱伝導経路を形成する。また熱伝導体は、モータの発熱面またはモータハウジングの内表面に沿って位置を調整した後に、固定具によって固定される。
【先行技術文献】
【特許文献】
【0007】
特開2022-056064号公報
特許第5734251号
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1の冷却装置は、ロボットの関節部のモータに冷却媒体流路体を配設する必要があり、構造が複雑となるという問題がある。
【0009】
別の構成として、冷却ファンを取り付けてモータを冷却(空冷)する構成が考えられる。しかしロボットがフルカバーモデル(機構部がカバーで覆われる構造)である場合には、モータもカバーで覆われている。そのカバーの外側に冷却ファンを取り付けたり、冷却ファンを覆うようにカバーを大きくしたりすると、ロボットが動作したときのフレーム干渉半径が大きくなるという問題がある。
【0010】
特許文献2の多関節ロボットでは、熱伝導体が位置調整された後に固定具によって固定され、各熱伝導シートが弾性変形することにより、モータの発熱面からの熱がモータハウジングまで伝達される熱伝導経路が形成される。しかし熱伝導シートはアルミニウムなどの金属よりも熱伝導性が低いため、放熱効果には改善の余地があった。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
ロボット
1か月前
株式会社不二越
エンドミル
1日前
株式会社不二越
X線測定装置
1日前
株式会社不二越
噛み込み検知装置
9日前
株式会社不二越
X線測定システム
23日前
株式会社不二越
X線測定システム
24日前
株式会社不二越
斜板式ピストンポンプ
1か月前
株式会社不二越
固定構造および固定治具
15日前
株式会社不二越
ロボットに用いる伝送路
22日前
株式会社不二越
超硬合金およびこれを用いた切削工具
15日前
株式会社不二越
センサシステム及びロボットシステム
22日前
株式会社不二越
直動軸受用合金鋼およびそれを用いた直動軸受
11日前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
15日前
個人
フラワーホッチキス。
25日前
個人
手持ち挟持具
3日前
川崎重工業株式会社
ハンド
29日前
株式会社マキタ
ハンマドリル
12日前
株式会社マキタ
ハンマドリル
12日前
工機ホールディングス株式会社
作業機
29日前
トヨタ自動車株式会社
ロボット
1か月前
株式会社安川電機
ロボット
9日前
川崎重工業株式会社
塗装システム
29日前
株式会社三共コーポレーション
工具保持具
3日前
トヨタ自動車株式会社
軌道生成装置
1か月前
アネックスツール株式会社
ドライバービット
1か月前
工機ホールディングス株式会社
作業機
29日前
トヨタ自動車株式会社
ロボットハンド
9日前
株式会社不二越
ロボットに用いる伝送路
22日前
川崎重工業株式会社
ワーク搬送ロボット
29日前
株式会社マキタ
現場用作業機
18日前
株式会社マキタ
回転打撃工具
1か月前
山九株式会社
レンチ保持治具
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1日前
学校法人立命館
ロボットハンド制御システム
18日前
株式会社マキタ
作業機
15日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ