TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148075
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048662
出願日
2024-03-25
発明の名称
ロボット
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250930BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
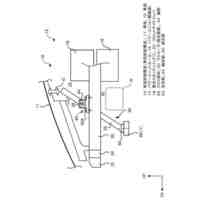
【課題】バックドライバビリティを向上させつつモータの回生電力を適切に消費することが可能なロボットを提供する。
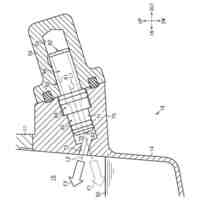
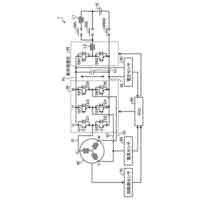
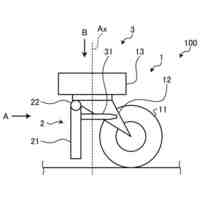
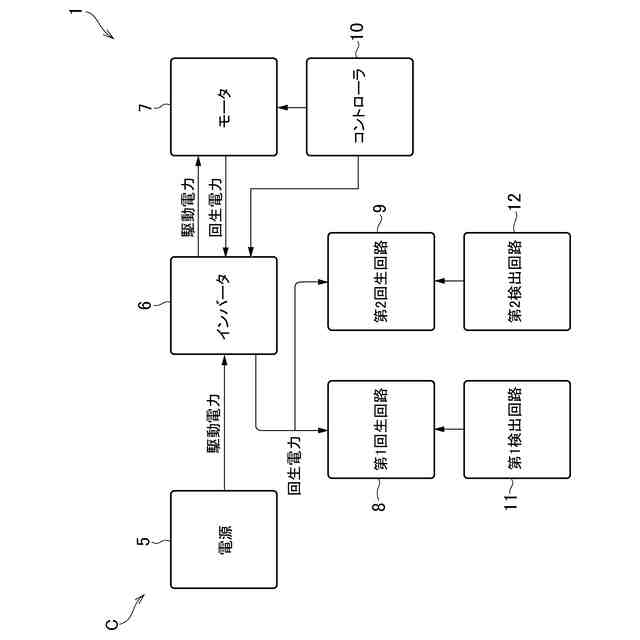
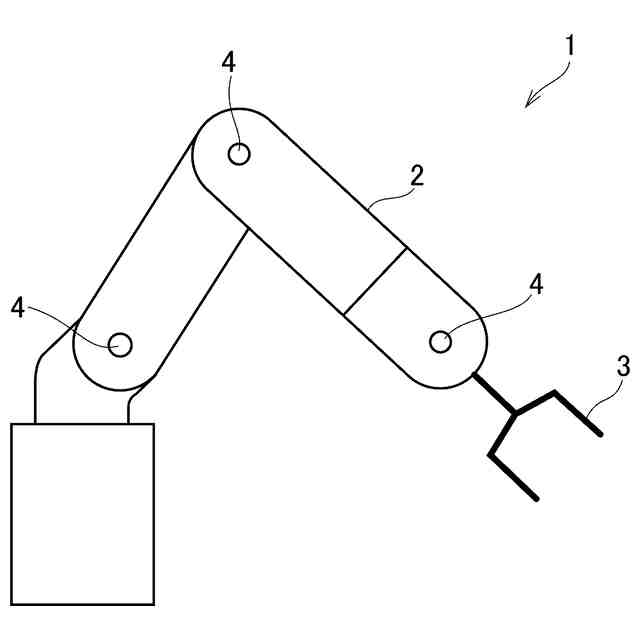
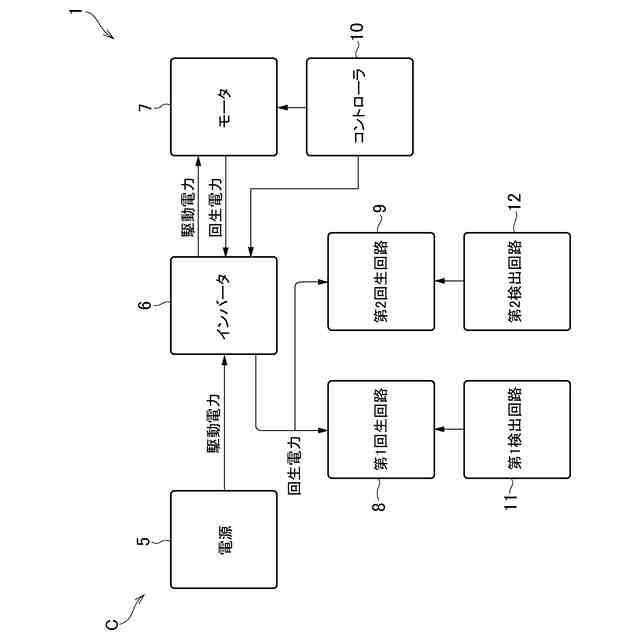
【解決手段】少なくとも一つの関節4と、関節4を稼働させるモータ7と、モータ7を駆動するための電力を供給する電源5と、を備えたロボット1であって、モータ7が外力によって動作させられることにより発生する回生電力を受容して消費する回生回路8,9を有し、回生回路8,9は、電力消費量が大小に異なる第1回生状態と第2回生状態との少なくも二つの状態に切り替わるように構成され、電源5の電圧を検出する検出手段11,12と、検出された電源5の電圧が第1の所定値の場合に回生回路8,9を第1回生状態に設定し、検出された電源5の電圧が第1の所定値より大きい第2の所定値の場合に回生回路を第2回生状態に設定する回生状態切替手段と、を更に備えている。
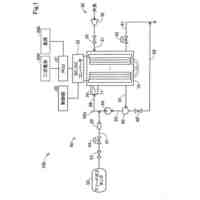
【選択図】図2
特許請求の範囲
【請求項1】
少なくとも一つの関節と、前記関節を稼働させるモータと、前記モータを駆動するための電力を供給する電源と、を備えたロボットであって、
前記モータが外力によって動作させられることにより発生する回生電力を受容して消費する回生回路を有し、
前記回生回路は、電力消費量が大小に異なる第1回生状態と第2回生状態との少なくも二つの状態に切り替わるように構成され、
前記電源の電圧を検出する検出手段と、
検出された電源の電圧が第1の所定値の場合に前記回生回路を前記第1回生状態に設定し、検出された電源の電圧が前記第1の所定値より大きい第2の所定値の場合に前記回生回路を前記第2回生状態に設定する回生状態切替手段と、を更に備えている
ことを特徴とするロボット。
発明の詳細な説明
【技術分野】
【0001】
この発明は、モータが回生した際に発生する電力を消費することにより、モータに制動力を作用させることが可能なダイナミックブレーキを有するロボットに関するものである。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
特許文献1には、そのようなダイナミックブレーキとして、モータの制御回路上に回生抵抗を有する二足歩行が可能な人型ロボットが開示されている。特許文献1に記載されたロボットでは、通常の動作時あるいは非常停止操作が行われた時に所定の作動電圧が入力された場合に、モータに駆動電力を供給する電力供給配線に回生抵抗が電気的に接続される。それにより、モータが回生することによって発電された電力がその回生抵抗によって熱として消費されるので、モータに制動力が作用する。また、特許文献1のロボットは、非常停止操作が行われた時に、電力供給配線に対する回生抵抗の接続動作と非接続動作とを交互に繰り返すように構成されている。それにより、電力供給配線を介してモータに生じる抵抗値を変化させて、ダイナミックブレーキによる制動力を調整するように構成されている。特許文献1では、そのような構成により、非常停止操作が行われた際には、ダイナミックブレーキによってモータに生じる制動力を減少させることができる。そのため、非常停止時においては、回生抵抗の抵抗値が大きい場合であってもロボットを比較的緩やかに停止させることができるので、ロボットの転倒などを抑制することができる、としている。
【先行技術文献】
【特許文献】
【0003】
特開2021-94640号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載のロボットでは、通常の動作の場合、所定の作動電圧が入力されたことにより電力供給配線に回生抵抗が接続されるものの、その回生抵抗によってモータに付与される制動力の大きさなどについては考慮されていない。そのため、特許文献1のロボットでは、通常の動作時、衝撃などによって外部から入力される外力の大きさに関わらず、モータには回生抵抗に含まれる抵抗に応じた制動力が作用することになる。その結果、衝撃などの外力が加わった際における、モータなどの駆動系の動作のしやすさである逆駆動性(バックドライバビリティ)が低下する可能性がある。あるいは、モータの回生電力が回生抵抗によって十分に消費されない可能性がある。その場合には、消費されなかった比較的大きな回生電力により、モータに電力を供給する電源の電圧が上昇してしまい、電源の耐久性が低下する可能性がある。
【0005】
また、特許文献1のロボットでは、非常停止操作が行われた場合に、電力供給配線に対する回生抵抗の接続動作と非接続動作とを交互に繰り返す制御を行うことによりモータに作用する制動力を低下させている。そのため、通常の動作時にもそのような制御を行うことにより、モータに作用する制動力を低下させることが考えられる。しかしながら、その場合には、その接続と非接続とを切り替える機構やソフトフェアの負荷が増大する可能性がある。このように、ロボットが周囲の物体や人と接触した際のバックドライバビリティを向上させることや、モータの回生電力を消費することなどについては改善の余地があった。
【0006】
この発明は、上記の技術的課題に着目してなされたものであって、外力が入力されたときに、バックドライバビリティを向上させつつモータの回生電力を適切に消費することが可能なロボットを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
この発明は、上記の目的を達成するために、少なくとも一つの関節と、前記関節を稼働させるモータと、前記モータを駆動するための電力を供給する電源と、を備えたロボットであって、前記モータが外力によって動作させられることにより発生する回生電力を受容して消費する回生回路を有し、前記回生回路は、電力消費量が大小に異なる第1回生状態と第2回生状態との少なくも二つの状態に切り替わるように構成され、前記電源の電圧を検出する検出手段と、検出された電源の電圧が第1の所定値の場合に前記回生回路を前記第1回生状態に設定し、検出された電源の電圧が前記第1の所定値より大きい第2の所定値の場合に前記回生回路を前記第2回生状態に設定する回生状態切替手段と、を更に備えていることを特徴とするものである。
【発明の効果】
【0008】
この発明におけるロボットによれば、モータが外力によって動作させられることにより発生する回生電力を消費する回生回路を備えている。回生回路は、電力消費量が大小に異なる第1回生状態と第2回生状態との少なくも二つの状態に切り替わるように構成されている。回生回路では、モータに電力を供給する電源の電圧が第1の所定値の場合に、第1回生状態が設定され、電源の電圧が第1の所定値より大きい第2の所定値の場合に、第2回生状態が設定される。そのため、外力によってモータから回生電力が発生した場合であっても、回生回路によってモータの回生電力を熱として消費することができる。したがって、電源の電圧の上昇を抑制することができるとともに、モータに制動力を作用させてモータを速やかに停止させることができる。
【0009】
また、第1回生状態および第2回生状態は、互いに電力消費量が異なるように構成されている。すなわち、第1回生回路および第2回生回路を選択的に接続あるいは遮断することにより、モータの回生電力の消費量が異なる複数の回生状態を設定することができる。その結果、ロボットに外力が入力されてモータが回生したときにモータに作用させる制動力を段階的に変化させることができる。
【0010】
そのため、例えば、第1回生状態が設定されたときの回生電力の消費量が比較的小さい値に設定されることにより、モータに作用する制動力を比較的小さくすることができる。すなわち、モータが比較的小さい減速度で停止するので、ロボットをしなやかに(滑らかに)停止させることができる。そして、第2接続状態が設定されたときの回生電力の消費量が比較的大きい値に設定されることにより、モータに作用する制動力を比較的大きくすることができる。すなわち、モータが比較的大きい減速度で停止するので、ロボットを速やかに停止させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
4日前
トヨタ自動車株式会社
電池
4日前
トヨタ自動車株式会社
配管
5日前
トヨタ自動車株式会社
電池
10日前
トヨタ自動車株式会社
車両
5日前
トヨタ自動車株式会社
電動車
4日前
トヨタ自動車株式会社
ロータ
5日前
トヨタ自動車株式会社
電動車
5日前
トヨタ自動車株式会社
監視装置
10日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
エンジン
5日前
トヨタ自動車株式会社
製造設備
10日前
トヨタ自動車株式会社
エンジン
4日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
学習装置
4日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
蓄電装置
4日前
トヨタ自動車株式会社
制御装置
4日前
トヨタ自動車株式会社
判定装置
4日前
トヨタ自動車株式会社
反応容器
4日前
トヨタ自動車株式会社
蓄電セル
12日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
コネクタ
4日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
電気自動車
4日前
トヨタ自動車株式会社
車両制御装置
4日前
トヨタ自動車株式会社
車両制御装置
5日前
トヨタ自動車株式会社
作業計画装置
5日前
トヨタ自動車株式会社
車両前部構造
5日前
トヨタ自動車株式会社
オイルタンク
5日前
トヨタ自動車株式会社
電池搭載構造
5日前
トヨタ自動車株式会社
車両前部構造
4日前
トヨタ自動車株式会社
車両前部構造
17日前
トヨタ自動車株式会社
燃料電池セル
5日前
トヨタ自動車株式会社
車輪制御構造
4日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ