TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170683
公報種別
公開特許公報(A)
公開日
2025-11-19
出願番号
2024075467
出願日
2024-05-07
発明の名称
制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人アイテック国際特許事務所
主分類
H02P
21/22 20160101AFI20251112BHJP(電力の発電,変換,配電)
要約
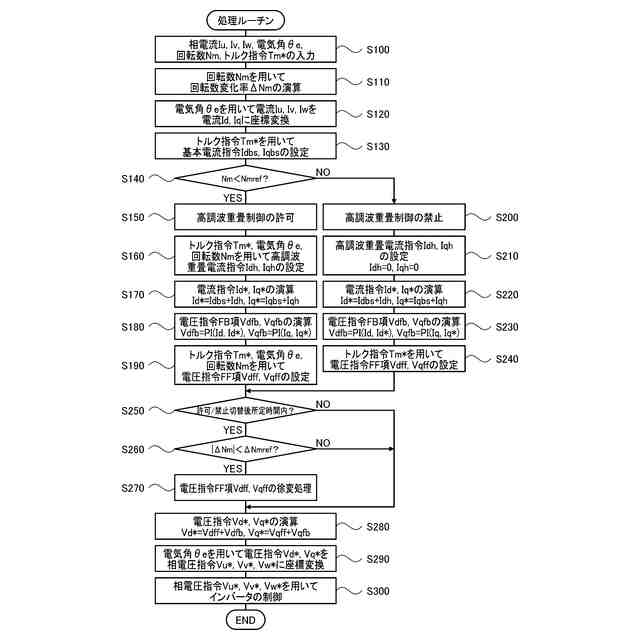
【課題】高調波重畳制御の許否の切替時にモータの回転数変化率が大きい場合、制御追従性が低下するのを抑制する。
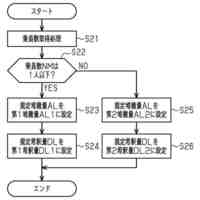
【解決手段】電気自動車は、高調波重畳制御の許否の切替から所定時間内のときにおいて、モータの回転数の単位時間当たりの変化量である回転数変化率の絶対値が所定変化率未満の場合、d軸、q軸の高調波重畳電流指令および/またはd軸、q軸の電圧指令フィードフォワード項に徐変処理を施し、回転数変化率が所定変化率以上の場合、d軸、q軸の高調波重畳電流指令およびd軸、q軸の電圧指令フィードフォワード項に対する徐変処理を禁止する。
【選択図】図2
特許請求の範囲
【請求項1】
駆動輪に連結されたモータと、前記モータを駆動するインバータと、を備える電動車に搭載され、前記モータの回転数と所定回転数との比較により前記高調波重畳制御の許否を判定し、前記モータのトルク指令に基づくd軸、q軸の基本電流指令と前記高調波重畳制御の許否に基づくd軸、q軸の高調波重畳電流指令との和をd軸、q軸の電流指令として演算し、前記d軸、q軸の電流指令とd軸、q軸の電流との差分が打ち消されるようにd軸、q軸の電圧指令フィードバック項を演算し、前記高調波重畳制御の許否に基づくd軸、q軸の電圧指令フィードフォワード項と前記d軸、q軸の電圧指令フィードバック項との和をd軸、q軸の電圧指令として演算し、前記d軸、q軸の電圧指令に基づいて前記インバータを制御する制御装置であって、
前記高調波重畳制御の許否の切替から所定時間内のときにおいて、前記モータの回転数の単位時間当たりの変化量である回転数変化率の絶対値が所定変化率未満の場合、前記d軸、q軸の高調波重畳電流指令および/または前記d軸、q軸の電圧指令フィードフォワード項に徐変処理を施し、前記回転数変化率が前記所定変化率以上の場合、前記d軸、q軸の高調波重畳電流指令および前記d軸、q軸の電圧指令フィードフォワード項に対する前記徐変処理を禁止する、
制御装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置に関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
従来、電力変換回路を用いてモータを制御する制御装置において、モータの有する各相の指令電圧を設定し、電力変換回路の操作によって各相のコイルの印加電圧を指令電圧に制御するものが提案されている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2014-195390号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
駆動輪に連結されたモータと、モータを駆動するインバータと、を備える電動車に搭載された制御装置において、モータの回転数と所定回転数との比較により高調波重畳制御の許否を判定し、モータのトルク指令に基づくd軸、q軸の基本電流指令と高調波重畳制御の許否に基づくd軸、q軸の高調波重畳電流指令との和をd軸、q軸の電流指令として演算し、d軸、q軸の電流指令とd軸、q軸の電流との差分が打ち消されるようにd軸、q軸の電圧指令フィードバック項を演算し、高調波重畳制御の許否に基づくd軸、q軸の電圧指令フィードフォワード項とd軸、q軸の電圧指令フィードバック項との和をd軸、q軸の電圧指令として演算し、d軸、q軸の電圧指令に基づいてインバータを制御するものがある。こうした制御装置において、高調波重畳制御の許否の切替時に、d軸、q軸の高調波重畳電流指令や電圧指令フィードフォワード項が急変してトルクショックを生じる、というのを抑制するために、d軸、q軸の高調波重畳電流指令や電圧指令フィードフォワード項に徐変処理を施すことが考えられる。しかし、回転数変化率の絶対値が大きいときに、制御追従性(トルクのトルク指令に対する追従性)が低下し得る。本開示の制御装置は、高調波重畳制御の許否の切替時にモータの回転数変化率が大きい場合、制御追従性が低下するのを抑制することを主目的とする。
【課題を解決するための手段】
【0005】
本開示の制御装置は、上述の主目的を達成するために以下の手段を採った。本開示の制御装置は、駆動輪に連結されたモータと前記モータを駆動するインバータとを備える電動車に搭載され、前記モータの回転数と所定回転数との比較により前記高調波重畳制御の許否を判定し、前記モータのトルク指令に基づくd軸、q軸の基本電流指令と前記高調波重畳制御の許否に基づくd軸、q軸の高調波重畳電流指令との和をd軸、q軸の電流指令として演算し、前記d軸、q軸の電流指令とd軸、q軸の電流との差分が打ち消されるようにd軸、q軸の電圧指令フィードバック項を演算し、前記高調波重畳制御の許否に基づくd軸、q軸の電圧指令フィードフォワード項と前記d軸、q軸の電圧指令フィードバック項との和をd軸、q軸の電圧指令として演算し、前記d軸、q軸の電圧指令に基づいて前記インバータを制御する制御装置であって、前記高調波重畳制御の許否の切替から所定時間内のときにおいて、前記モータの回転数の単位時間当たりの変化量である回転数変化率の絶対値が所定変化率未満の場合、前記d軸、q軸の高調波重畳電流指令および/または前記d軸、q軸の電圧指令フィードフォワード項に徐変処理を施し、前記回転数変化率が前記所定変化率以上の場合、前記d軸、q軸の高調波重畳電流指令および前記d軸、q軸の電圧指令フィードフォワード項に対する前記徐変処理を禁止することを要旨とする。
【0006】
本開示の制御装置では、上述の処理により、高調波重畳制御の許否の切替から所定時間内で、且つ、モータの回転数変化率の絶対値が所定変化率未満の場合、トルクショックの発生を抑制できる。また、高調波重畳制御の許否の切替から所定時間内で、且つ、回転数変化率が所定変化率以上の場合、制御追従性(トルクのトルク指令に対する追従性)の低下を抑制できる。
【図面の簡単な説明】
【0007】
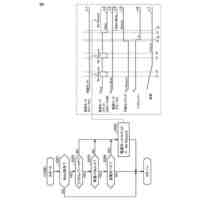
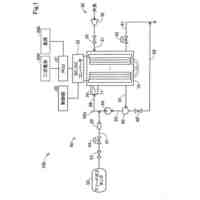
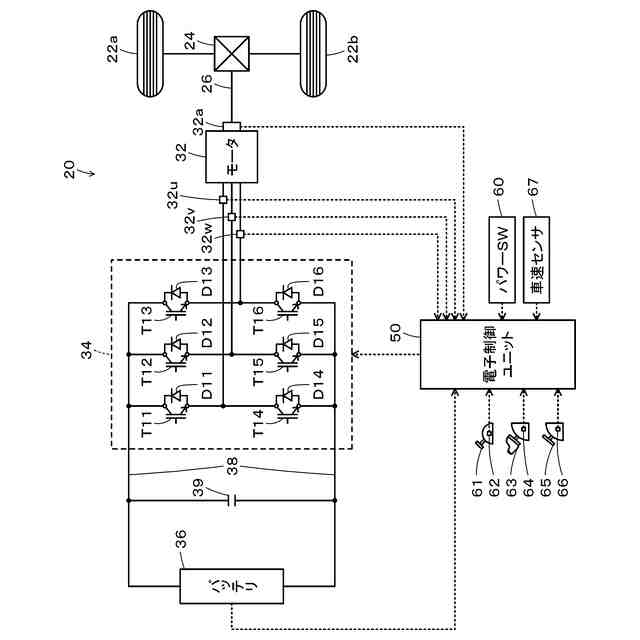
本開示の実施形態の制御装置を備える電気自動車20の概略構成図である。
処理ルーチンの一例を示すフローチャートである。
変形例の処理ルーチンの一例を示すフローチャートである。
【発明を実施するための形態】
【0008】
本開示を実施するための形態(実施形態)について図面を参照しながら説明する。図1は、本開示の実施形態の制御装置を備える電気自動車20の概略構成図である。図示するように、実施形態の電気自動車20は、モータ32と、インバータ34と、蓄電装置としてのバッテリ36と、電子制御ユニット50(制御装置)とを備える。
【0009】
モータ32は、三相交流電動機として構成されており、回転子コアに永久磁石が埋め込まれた回転子と、固定子コアに三相コイルが巻回された固定子とを備える。モータ32の回転子は、駆動輪22a,22bにデファレンシャルギヤ24を介して連結された駆動軸26に接続されている。インバータ34は、電力ライン38に接続されている。インバータ34は、6つのスイッチング素子としてのトランジスタT11~T16と、6つのトランジスタT11~T16にそれぞれ並列に接続された6つのダイオードD11~D16とを備える。トランジスタT11~T16は、それぞれ、電力ライン38の正極ラインおよび負極ラインに対してソース側およびシンク側とになるように2個ずつペアで配置されている。トランジスタT11~T16の対となるトランジスタの接続点の各々は、モータ32の三相(U相、V相、W相)コイルの各々に接続されている。したがって、電子制御ユニット50によって、対となるトランジスタT11~T16のオン時間の割合が調節されることにより、モータ32の三相コイルに回転磁界が形成され、モータ32(回転子)が回転駆動される。バッテリ36は、例えば、リチウムイオン二次電池やニッケル水素二次電池として構成されており、インバータ34と共に電力ライン38に接続されている。電力ライン38の正極ラインと負極ラインとには、コンデンサ39が取り付けられている。
【0010】
電子制御ユニット50は、マイクロコンピュータを備える。電子制御ユニット50は、回転位置センサ32aからのモータ32の回転子の回転位置θm、電流センサ32u,32v,32wからのモータ32の各相の相電流Iu,Iv,Iw、電圧センサや電流センサからのバッテリ36の電圧Vbや電流Ibを入力している。電子制御ユニット50は、パワースイッチ60からのオンオフ信号、シフトポジションセンサ62からのシフトレバー61の操作位置(シフトポジションSP)、アクセルペダルポジションセンサ64からのアクセルペダル63の踏込量(アクセル開度Acc)、ブレーキペダルポジションセンサ66からのブレーキペダル65の踏込量(ブレーキペダルポジションBP)、車速センサ67からの車速Vも入力している。電子制御ユニット50は、インバータ34のトランジスタT11~T16への制御信号を出力している。電子制御ユニット50は、モータ32の回転子の回転位置θmに基づいてモータ32の電気角θeや回転数Nmを演算している。電子制御ユニット50は、バッテリ36の電流Ibの積算値に基づいてバッテリ36の蓄電割合SOCを演算している。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
6日前
トヨタ自動車株式会社
車両
今日
トヨタ自動車株式会社
方法
1か月前
トヨタ自動車株式会社
車両
20日前
トヨタ自動車株式会社
電池
26日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
電池
12日前
トヨタ自動車株式会社
車両
21日前
トヨタ自動車株式会社
電池
20日前
トヨタ自動車株式会社
方法
5日前
トヨタ自動車株式会社
車体
1か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
配管
21日前
トヨタ自動車株式会社
ロータ
21日前
トヨタ自動車株式会社
電動車
20日前
トヨタ自動車株式会社
蓄電池
1か月前
トヨタ自動車株式会社
電動車
21日前
トヨタ自動車株式会社
モータ
1か月前
トヨタ自動車株式会社
タンク
5日前
トヨタ自動車株式会社
判定装置
20日前
トヨタ自動車株式会社
電動車両
1か月前
トヨタ自動車株式会社
樹脂外板
1か月前
トヨタ自動車株式会社
反応容器
20日前
トヨタ自動車株式会社
電動車両
1か月前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
路側装置
1か月前
トヨタ自動車株式会社
蓄電装置
20日前
トヨタ自動車株式会社
蓄電装置
20日前
トヨタ自動車株式会社
蓄電装置
20日前
トヨタ自動車株式会社
制御装置
5日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
制御装置
1か月前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電装置
12日前
トヨタ自動車株式会社
蓄電装置
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ