TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025170837
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024075615
出願日
2024-05-08
発明の名称
学習装置
出願人
トヨタ自動車株式会社
代理人
個人
主分類
B25J
13/00 20060101AFI20251113BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対称性を有するロボットハンドによる把持姿勢の推定精度を向上させる学習装置を実現する。
【解決手段】本開示の一形態に係る学習装置130は、2回回転対称なロボットハンド10の第1の姿勢と、第1の姿勢を回転対称の軸を中心に180°回転させた第2の姿勢とを1つのパラメータセットで表す訓練データを用いて、ロボットハンド10により物体を把持する姿勢を機械学習する学習部134を備える。
【選択図】図1
特許請求の範囲
【請求項1】
2回回転対称なロボットハンドの第1の姿勢と、前記第1の姿勢を回転対称の軸を中心に180°回転させた第2の姿勢とを1つのパラメータセットで表す訓練データを用いて、前記ロボットハンドにより物体を把持する姿勢を機械学習する学習部
を備える学習装置。
続きを表示(約 530 文字)
【請求項2】
前記ロボットハンドは、前記回転対称の軸を含む対称面に関する面対称性を有し、
前記パラメータセットは、前記対称面に垂直な法線ベクトルの分布のパラメータと、前記回転対称の軸に平行なベクトルを示すパラメータとを含む
請求項1に記載の学習装置。
【請求項3】
前記分布は、球面上に定義され、前記対称面に関して対称な分布である
請求項2に記載の学習装置。
【請求項4】
前記ロボットハンドにより前記物体を把持する姿勢を表すパラメータセットを、前記学習部により生成された推論モデルを用いて推定し、前記パラメータセットに基づく前記分布のばらつきから、前記パラメータセットの信頼度が高いか否かを判定する推定部
を備える請求項3に記載の学習装置。
【請求項5】
前記ロボットハンドにより前記物体を把持する姿勢を表すパラメータセットを、前記学習部により生成された推論モデルを用いて推定し、前記パラメータセットに基づく前記分布から複数の法線ベクトルをサンプリングし、前記複数の法線ベクトルそれぞれに対応する複数の姿勢を推定する推定部
を備える請求項3に記載の学習装置。
発明の詳細な説明
【技術分野】
【0001】
本開示は、学習装置に関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
特許文献1には、対称性を有するロボットハンドを用いて物体を把持する把持装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2018-089752号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
回転対称性を有するロボットハンド(例:二指ハンド)による把持姿勢を機械学習する場合、対称性が学習を不安定化し、推定精度を低下させる恐れがある。例えば、ある領域で0°回転の把持姿勢が出力され、別の領域で180°回転の把持姿勢が出力される場合、2つの領域の境界面で誤った把持姿勢が出力される恐れがある。
【0005】
本開示は、このような問題点に鑑みてなされたものであり、対称性を有するロボットハンドによる把持姿勢の推定精度を向上させる学習装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示にかかる学習装置は、2回回転対称なロボットハンドの第1の姿勢と、前記第1の姿勢を回転対称の軸を中心に180°回転させた第2の姿勢とを1つのパラメータセットで表す訓練データを用いて、前記ロボットハンドにより物体を把持する姿勢を機械学習する学習部を備える。
【発明の効果】
【0007】
本開示によれば、対称性を有するハンドによる把持姿勢の推定精度を向上させることが可能な学習装置を提供することができる。
【図面の簡単な説明】
【0008】
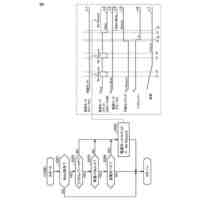
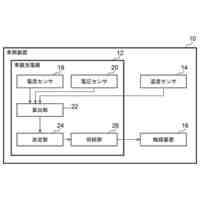
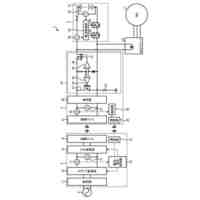
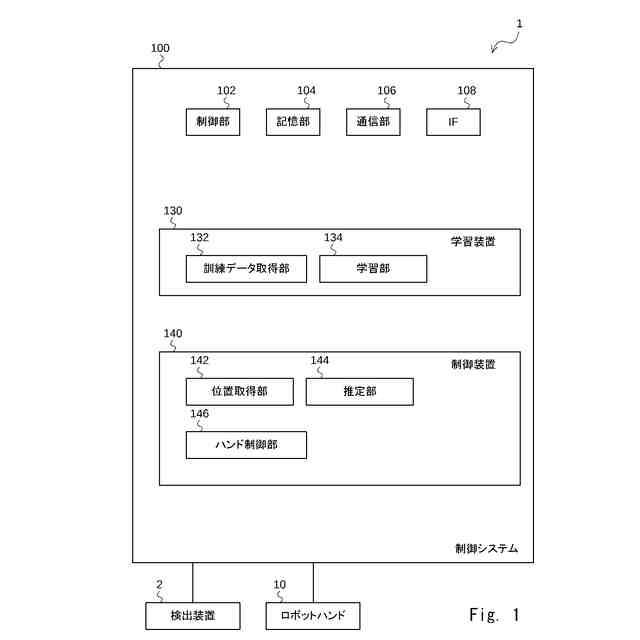
実施形態1にかかる把持システムの構成を示すブロック図である。
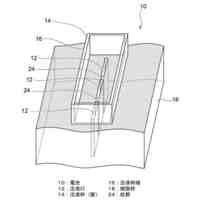
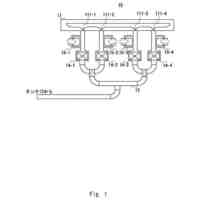
実施形態1にかかるロボットハンドの構成の例を示す図である。
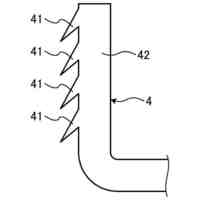
実施形態1にかかるロボットハンドの姿勢の表現方法を説明するための図である。
【発明を実施するための形態】
【0009】
以下、本開示を適用した具体的な実施の形態について、図面を参照しながら詳細に説明する。但し、本開示が以下の実施の形態に限定される訳ではない。また、説明を明確にするため、以下の記載及び図面は、適宜、簡略化されている。
【0010】
実施形態1
図1は、実施形態1にかかる把持システム1の構成を示すブロック図である。把持システム1は、検出装置2、ロボットハンド10、および制御システム100を有する。制御システム100は、検出装置2およびロボットハンド10と、無線または有線の通信ネットワークを介して接続されている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
車両
7日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
電池
13日前
トヨタ自動車株式会社
方法
6日前
トヨタ自動車株式会社
タンク
6日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
接合構造
今日
トヨタ自動車株式会社
エンジン
今日
トヨタ自動車株式会社
車載装置
1日前
トヨタ自動車株式会社
塗工装置
13日前
トヨタ自動車株式会社
車両装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
受電装置
今日
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
エンジン
13日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
蓄電装置
14日前
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
制御装置
6日前
トヨタ自動車株式会社
蓄電装置
14日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
蓄電装置
13日前
トヨタ自動車株式会社
処理装置
13日前
トヨタ自動車株式会社
制御装置
13日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ