TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171018
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024075964
出願日
2024-05-08
発明の名称
車両制御装置
出願人
トヨタ自動車株式会社
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/045 20120101AFI20251113BHJP(車両一般)
要約
【課題】車両の旋回時に前後加速度に影響を与えずに各輪の駆動力を適切に制御することができる車両制御装置を提供すること。
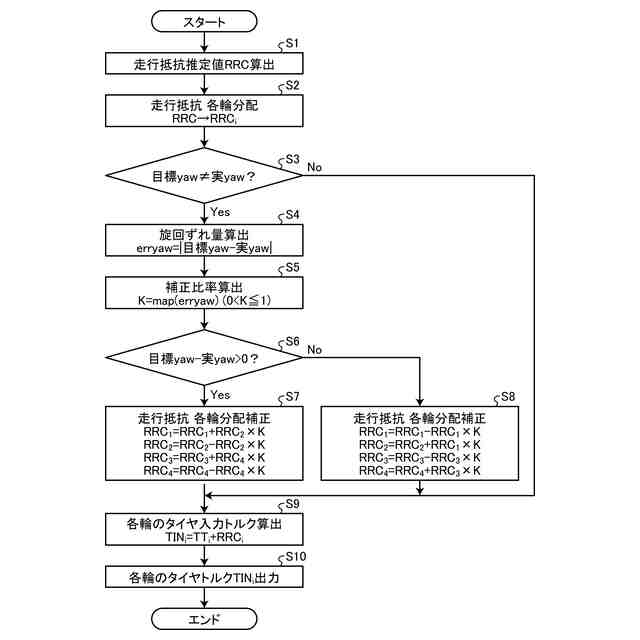
【解決手段】車両の車体速と車両の車輪速とに基づいて実スリップ率を算出し、車両が走行中の路面のμ-s特性を推定し、目標スリップ率をμ-s特性の最大μとなるスリップ率に設定し、実スリップ率が目標スリップ率に近づくように車輪速をフィードバック制御し、車両全体での走行抵抗を推定し、推定された車両全体での走行抵抗を車両の各輪に分配し、車輪への入力トルクを目標タイヤ力と分配された走行抵抗とを合算した値に設定する車両制御装置であって、目標ヨーレートと実ヨーレートとの間にずれが生じている場合には、目標ヨーレートと実ヨーレートとの差分に基づいて各輪の走行抵抗の分配を補正する。
【選択図】図4
特許請求の範囲
【請求項1】
車両の車体速と前記車両の車輪速とに基づいて実スリップ率を算出し、
前記車両が走行中の路面のμ-s特性を推定し、
目標スリップ率を前記μ-s特性の最大μとなるスリップ率に設定し、
前記実スリップ率が前記目標スリップ率に近づくように前記車輪速をフィードバック制御し、
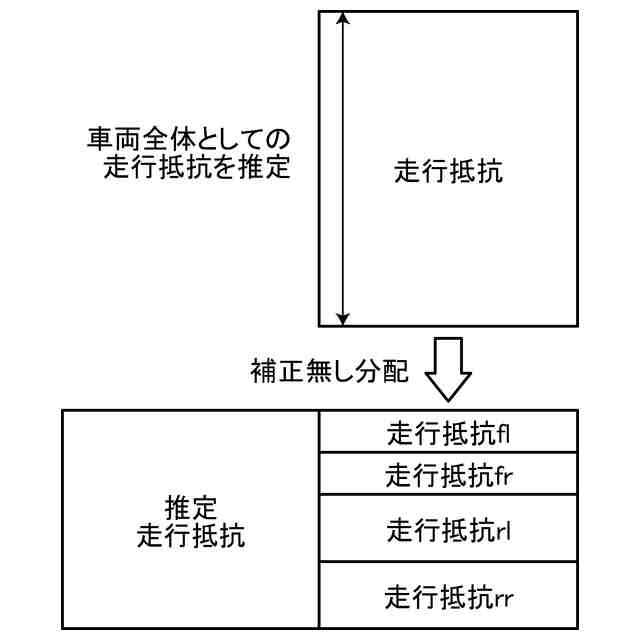
車両全体での走行抵抗を推定し、
推定された前記車両全体での走行抵抗を前記車両の各輪に分配し、
車輪への入力トルクを目標タイヤ力と分配された前記走行抵抗とを合算した値に設定する車両制御装置であって、
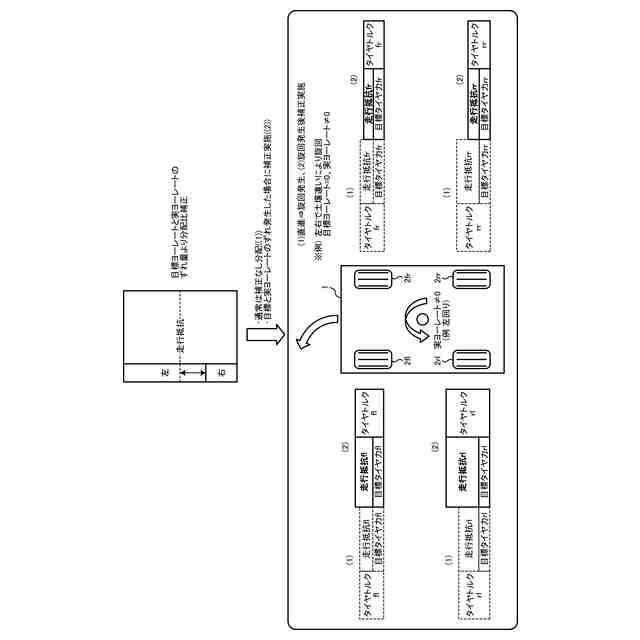
目標ヨーレートと実ヨーレートとの間にずれが生じている場合には、前記目標ヨーレートと前記実ヨーレートとの差分に基づいて各輪の走行抵抗の分配を補正する
ことを特徴とする車両制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、ヨーレートを算出してオーバーステアとアンダーステアとを判断するとともに左右のタイヤの駆動力を制御する車両制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2009-012708号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の構成では、車両の旋回時に制動力により駆動力が減らされる分はエンジン出力を増大させないと車両の前後加速度に影響が及ぶ虞があり、改善の余地がある。
【0005】
本発明は、上記事情に鑑みてなされたものであって、車両の旋回時に前後加速度に影響を与えずに各輪の駆動力を適切に制御することができる車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明は、車両の車体速と前記車両の車輪速とに基づいて実スリップ率を算出し、前記車両が走行中の路面のμ-s特性を推定し、目標スリップ率を前記μ-s特性の最大μとなるスリップ率に設定し、前記実スリップ率が前記目標スリップ率に近づくように前記車輪速をフィードバック制御し、車両全体での走行抵抗を推定し、推定された前記車両全体での走行抵抗を前記車両の各輪に分配し、車輪への入力トルクを目標タイヤ力と分配された前記走行抵抗とを合算した値に設定する車両制御装置であって、目標ヨーレートと実ヨーレートとの間にずれが生じている場合には、前記目標ヨーレートと前記実ヨーレートとの差分に基づいて各輪の走行抵抗の分配を補正することを特徴とする。
【発明の効果】
【0007】
本発明では、車両の旋回時に前後加速度に影響を与えずに各輪の駆動力を適切に制御することができる。
【図面の簡単な説明】
【0008】
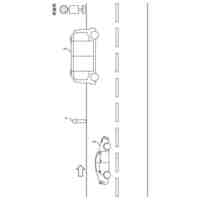
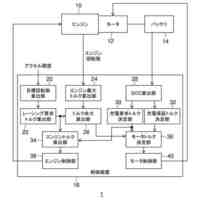
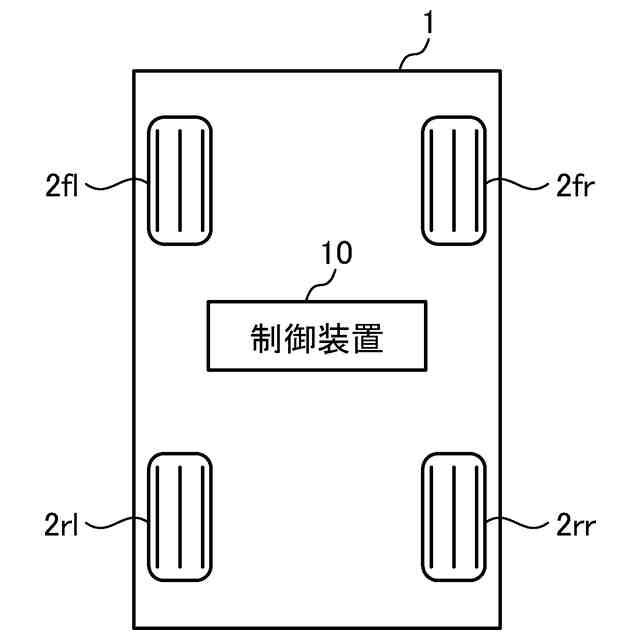
図1は、実施形態における車両を模式的に示す図である。
図2は、通常時の走行抵抗の分配を説明するための図である。
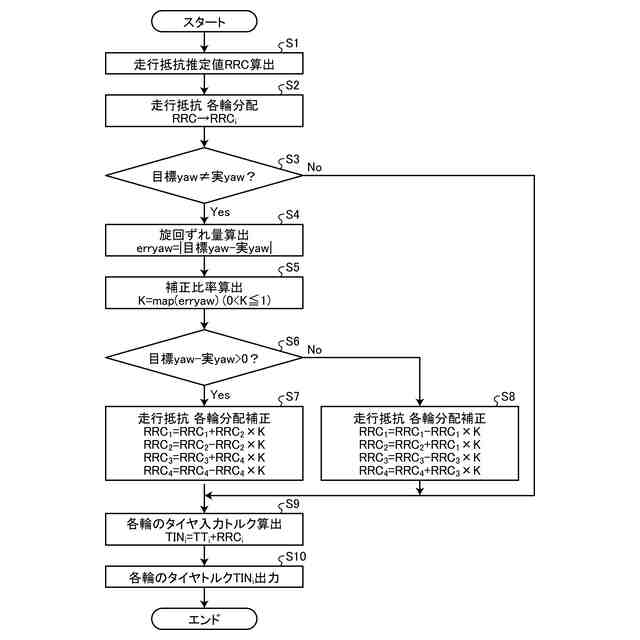
図3は、走行抵抗の分配を補正する場合を説明するための図である。
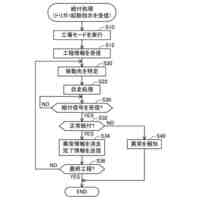
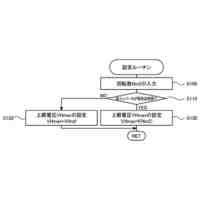
図4は、走行抵抗補正処理を示すフローチャート図である。
【0009】
以下、本発明の実施形態における車両制御装置について具体的に説明する。なお、本発明は、以下に説明する実施形態に限定されるものではない。
【0010】
図1は、実施形態における車両を模式的に示す図である。車両1は、エンジンやモータなどの動力源と、動力源から出力された動力により駆動する駆動輪と、動力源からの動力を駆動輪に伝達する動力伝達機構と、車輪を制動するブレーキ装置とを備える。車両1は動力源からの動力を駆動輪に伝達することにより走行する。車両1は、前左輪2flと、前右輪2frと、後左輪2rlと、後右輪2rrと、制御装置10とを備える。制御装置10は車両制御装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
方法
15日前
トヨタ自動車株式会社
配管
2日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
車両
15日前
トヨタ自動車株式会社
電池
7日前
トヨタ自動車株式会社
車両
2日前
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
電池
16日前
トヨタ自動車株式会社
車体
15日前
トヨタ自動車株式会社
電池
1日前
トヨタ自動車株式会社
モータ
14日前
トヨタ自動車株式会社
電動車
2日前
トヨタ自動車株式会社
ロータ
2日前
トヨタ自動車株式会社
電動車
1日前
トヨタ自動車株式会社
蓄電池
15日前
トヨタ自動車株式会社
制御装置
14日前
トヨタ自動車株式会社
路側装置
14日前
トヨタ自動車株式会社
蓄電装置
14日前
トヨタ自動車株式会社
電動車両
14日前
トヨタ自動車株式会社
路側装置
14日前
トヨタ自動車株式会社
制御装置
1日前
トヨタ自動車株式会社
学習装置
1日前
トヨタ自動車株式会社
蓄電セル
9日前
トヨタ自動車株式会社
コネクタ
1日前
トヨタ自動車株式会社
監視装置
7日前
トヨタ自動車株式会社
路側装置
14日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
樹脂外板
15日前
トヨタ自動車株式会社
制御装置
2日前
トヨタ自動車株式会社
エンジン
2日前
トヨタ自動車株式会社
路側装置
14日前
トヨタ自動車株式会社
製造設備
7日前
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
鋳造装置
14日前
トヨタ自動車株式会社
蓄電装置
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ