TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025143953
公報種別
公開特許公報(A)
公開日
2025-10-02
出願番号
2024043483
出願日
2024-03-19
発明の名称
ロボット
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250925BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】カウンターウエイトに対して用途に応じて異なる動作制御を行うことができるロボットを提供する。
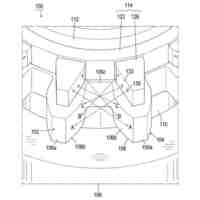
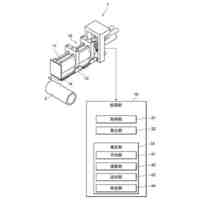
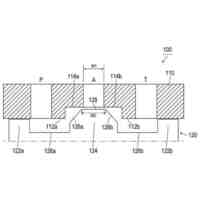
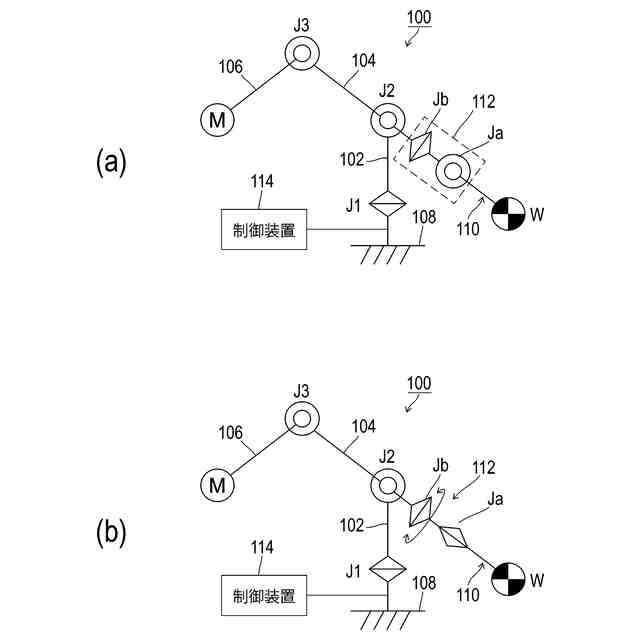
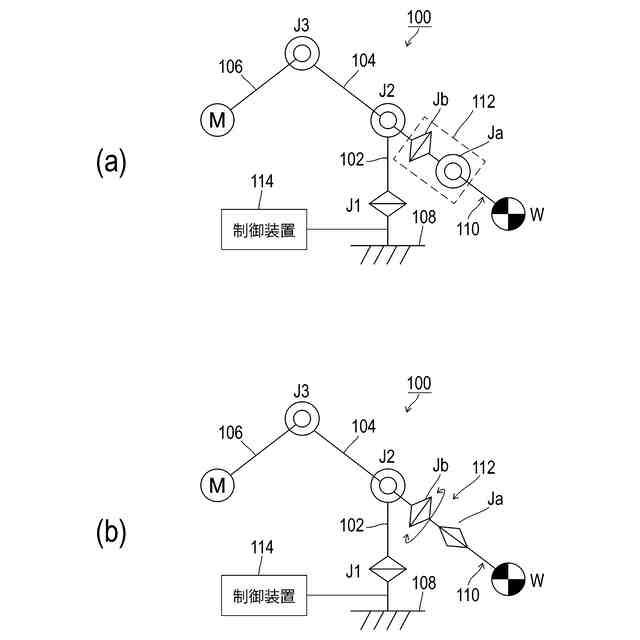
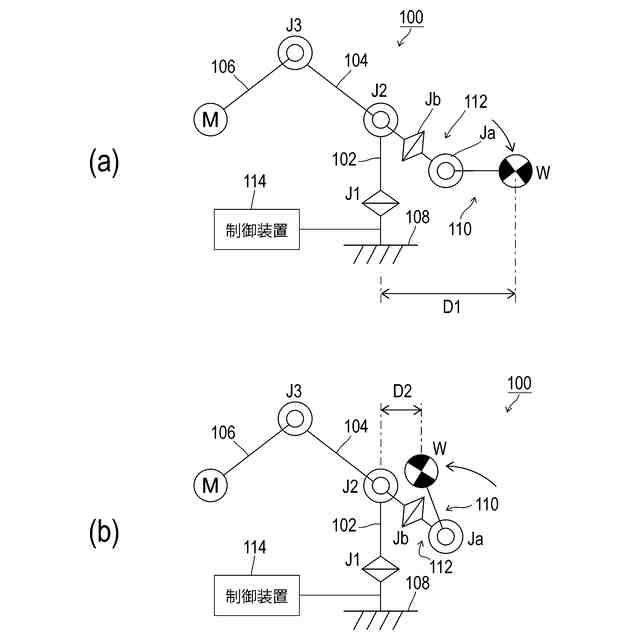
【解決手段】本発明にかかるロボット100は、下アーム104および上アーム106と、各アームを回動させる関節であるJ1軸、J2軸およびJ3軸と、下アームに連結され、J2軸を基準にして下アームの反対側に延びる連結アーム110と、連結アームに取り付けられたカウンターウエイトWと、連結アームに配置され、連結アームを変形させてカウンターウエイトを回動させるウエイト回動装置112と、関節およびウエイト回動装置の動作を制御する制御装置114と、を備えることを特徴とする。
【選択図】図1
特許請求の範囲
【請求項1】
1つ以上のアームと、
前記アームを回動させる1つ以上の関節と、
前記アームに連結され、前記関節を基準にして前記アームの反対側に延びる連結アームと、
前記連結アームに取り付けられたカウンターウエイトと、
前記連結アームに配置され、該連結アームを変形させて前記カウンターウエイトを回動させるウエイト回動装置と、
前記関節および前記ウエイト回動装置の動作を制御する制御装置と、を備えることを特徴とするロボット。
続きを表示(約 230 文字)
【請求項2】
前記制御装置は、前記アームを回動するとき、前記ウエイト回動装置を制御して、前記アームの回動方向と同じ方向に前記カウンターウエイトを加速させて前記アームを減速させることを特徴とする請求項1に記載のロボット。
【請求項3】
前記制御装置は、前記アームを回動するとき、前記ウエイト回動装置を制御して、前記アームの回動方向とは逆方向に前記カウンターウエイトを加速させて前記アームを加速させることを特徴とする請求項1に記載のロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、カウンターウエイトが取り付けられたアームを備えるロボットに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
工場等の生産現場では、アームを備えた産業用ロボットが用いられている。産業用ロボットは、複数のアームが関節において連結されていて、アームを動作させることによってワークに対する処理を行っている。
【0003】
例えば特許文献1に、アームの重力作用を受ける関節部にカウンタバランス部を設けた産業用ロボットが記載されている。このカウンタバランス部は、重力トルクの変化に応じて、おもりを往復動させて関節部に対し接近または離間させることにより、アームの重心を関節部付近に位置させて、アームの重力トルクを軽減している。
【先行技術文献】
【特許文献】
【0004】
特開昭62-162491号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
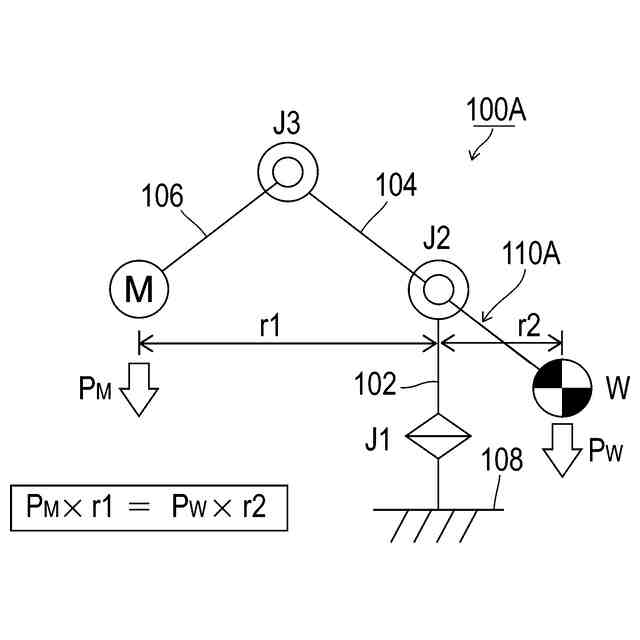
しかし特許文献1の産業用ロボットは、重力トルクの変化に応じてカウンタバランス部(カウンターウエイト)を自動調整しているに過ぎず、いわゆる重力補償を行うためだけにカウンターウエイトが用いられている。
【0006】
本発明は、このような課題に鑑み、カウンターウエイトに対して用途に応じて異なる動作制御を行うことができるロボットを提供することを目的としている。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明にかかるロボットの代表的な構成は、1つ以上のアームと、アームを回動させる1つ以上の関節と、アームに連結され、関節を基準にしてアームの反対側に延びる連結アームと、連結アームに取り付けられたカウンターウエイトと、連結アームに配置され、連結アームを変形させてカウンターウエイトを回動させるウエイト回動装置と、関節およびウエイト回動装置の動作を制御する制御装置と、を備えることを特徴とする。
【0008】
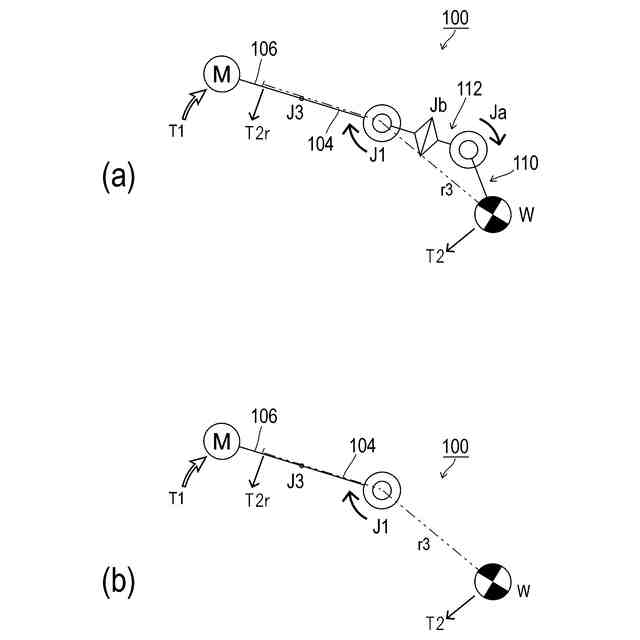
上記の制御装置は、アームを回動するとき、ウエイト回動装置を制御して、アームの回動方向と同じ方向にカウンターウエイトを加速させてアームを減速させることが好ましい。
【0009】
上記の制御装置は、アームを回動するとき、ウエイト回動装置を制御して、アームの回動方向とは逆方向にカウンターウエイトを加速させてアームを加速させることが好ましい。
【発明の効果】
【0010】
本発明によれば、カウンターウエイトに対して用途に応じて異なる動作制御を行うことができるロボットを提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
ロボット
2か月前
株式会社不二越
硬質材料
2か月前
株式会社不二越
ブローチ盤
2か月前
株式会社不二越
エンドミル
今日
株式会社不二越
エンドミル
1か月前
株式会社不二越
流路切換弁
12日前
株式会社不二越
歯車加工装置
28日前
株式会社不二越
歯車加工装置
28日前
株式会社不二越
歯車加工装置
28日前
株式会社不二越
駆動伝達装置
3か月前
株式会社不二越
X線測定装置
1か月前
株式会社不二越
空冷式油圧装置
5日前
株式会社不二越
電動油圧ポンプ
5日前
株式会社不二越
熱処理システム
3か月前
株式会社不二越
アクチュエータ
3か月前
株式会社不二越
電動油圧ポンプ
5日前
株式会社不二越
X線測定システム
5日前
株式会社不二越
エッジ仕上げ装置
2か月前
株式会社不二越
ノンリーク三方弁
2か月前
株式会社不二越
刃先交換式ドリル
1日前
株式会社不二越
回転駆動システム
14日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
ロボットシステム
3か月前
株式会社不二越
ロボットシステム
3か月前
株式会社不二越
ロボットシステム
3か月前
株式会社不二越
ロボット操作装置
3か月前
株式会社不二越
噛み込み検知装置
1か月前
株式会社不二越
垂直多関節ロボット
20日前
株式会社不二越
複合アクチュエータ
2か月前
株式会社不二越
スカイビング加工機
3か月前
株式会社不二越
垂直多関節ロボット
2か月前
株式会社不二越
スカイビング加工機
3か月前
株式会社不二越
斜板式ピストンポンプ
2か月前
株式会社不二越
移動ロボットシステム
2か月前
株式会社不二越
固定構造および固定治具
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ