TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025135782
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033744
出願日
2024-03-06
発明の名称
エッジ仕上げ装置
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
9/10 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】PCを使用せず単一のプログラムによって歯車形状のワークのエッジをバリ取りまたは面取りすることができるエッジ仕上げ装置を提供する。
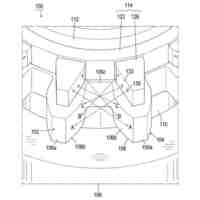
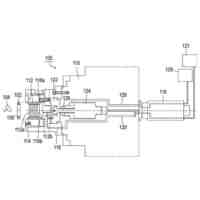
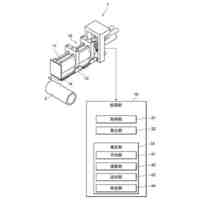
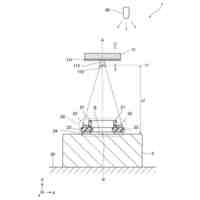
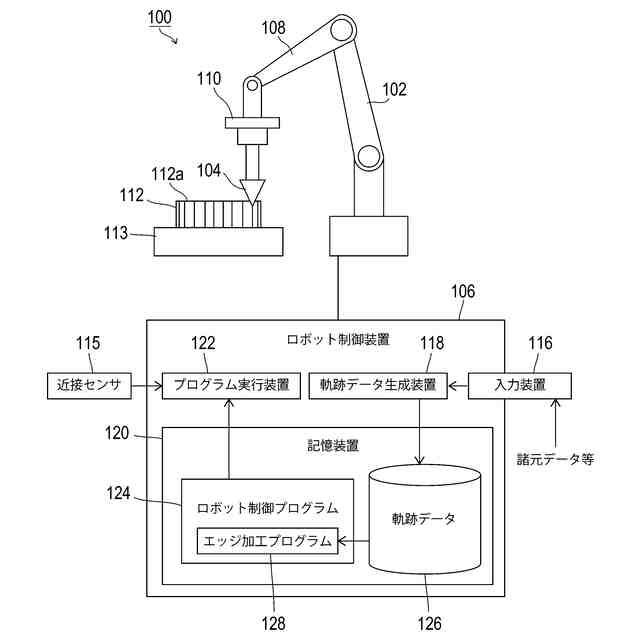
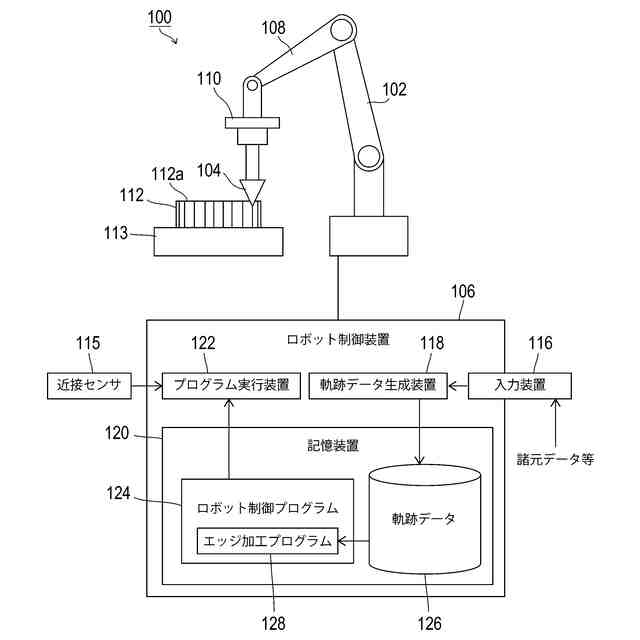
【解決手段】ツール104を用いて歯車形状のワーク112のエッジ112aを加工するエッジ仕上げ装置100において、ツールを移動させるロボットアーム108と、ロボット制御プログラム124を実行してロボットアームの動作を制御するロボット制御装置106とを備え、ロボット制御装置106は、入力された歯車の諸元データからツールが移動すべき軌跡を示す軌跡データ126を生成する軌跡データ生成装置118と、ロボット制御プログラムに含まれるバリ取りまたは面取り用の単一のエッジ加工プログラム128および複数の軌跡データを記憶する記憶装置120と、記憶装置120から軌跡データを読み出してエッジ加工プログラムを実行するプログラム実行装置122と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
ツールを用いて歯車形状のワークのエッジを加工するエッジ仕上げ装置において、
前記ツールを移動させるロボットアームと、
ロボット制御プログラムを実行して前記ロボットアームの動作を制御するロボット制御装置とを備え、
前記ロボット制御装置は、
入力された歯車の諸元データから前記ツールが移動すべき軌跡を示す軌跡データを生成する軌跡データ生成装置と、
前記ロボット制御プログラムに含まれるバリ取りまたは面取り用の単一のエッジ加工プログラムおよび複数の前記軌跡データを記憶する記憶装置と、
前記記憶装置から前記軌跡データを読み出して前記エッジ加工プログラムを実行するプログラム実行装置と、を有することを特徴とするエッジ仕上げ装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークを加工したときにエッジに形成されるバリの除去またはエッジの面取りを、自動で行うエッジ仕上げ装置に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
従来から、ツールを用いてワークを加工したときに、歯車形状のワークのエッジに形成されるバリの除去またはワークのエッジの面取りを、自動で行う装置が知られている。例えば特許文献1に、ツールを用いて歯車形状のワークのバリを除去(バリ取り)する、またはワークのエッジを面取りするエッジ仕上げ装置が記載されている。
【0003】
このエッジ仕上げ装置は、ワークまたはツールの少なくとも一方を相対的に回転させるロボットと、ロボットを制御するロボット制御装置と、ロボット制御装置に接続されるコンピュータ(PC)であるデータ処理装置とを備える。データ処理装置は、ツールがワークのエッジを倣うロボットプログラムを生成する。そしてロボット制御装置は、ロボットをロボットプログラムによって動作させてワークのエッジをバリ取りまたは面取りする。
【先行技術文献】
【特許文献】
【0004】
特開2023-46754号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし特許文献1のエッジ仕上げ装置では、PCであるデータ処理装置によって歯車ごとにロボットプログラムを生成している。つまり、ロボットプログラムはPC用のプログラムであり、しかも歯車ごとに異なるプログラムとなるためプログラム数が膨大となり、再生すべきプログラムを特定することが困難となってしまう。また歯車を加工する現場は、霧状の切削油が充満するなどPCの使用には適さない環境下にあり、データ処理装置に不具合が生じる可能性がある。
【0006】
本発明は、このような課題に鑑み、PCを使用せず単一のプログラムによって歯車形状のワークのエッジをバリ取りまたは面取りすることができるエッジ仕上げ装置を提供することを目的としている。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明にかかるエッジ仕上げ装置の代表的な構成は、ツールを用いて歯車形状のワークのエッジを加工するエッジ仕上げ装置において、ツールを移動させるロボットアームと、ロボット制御プログラムを実行してロボットアームの動作を制御するロボット制御装置とを備え、ロボット制御装置は、入力された歯車の諸元データからツールが移動すべき軌跡を示す軌跡データを生成する軌跡データ生成装置と、ロボット制御プログラムに含まれるバリ取りまたは面取り用の単一のエッジ加工プログラムおよび複数の軌跡データを記憶する記憶装置と、記憶装置から軌跡データを読み出してエッジ加工プログラムを実行するプログラム実行装置と、を有することを特徴とする。
【発明の効果】
【0008】
本発明によれば、PCを使用せず単一のプログラムによって歯車形状のワークのエッジをバリ取りまたは面取りすることができるエッジ仕上げ装置を提供することができる。
【図面の簡単な説明】
【0009】
本発明の実施形態におけるエッジ仕上げ装置の構成を示す概略図
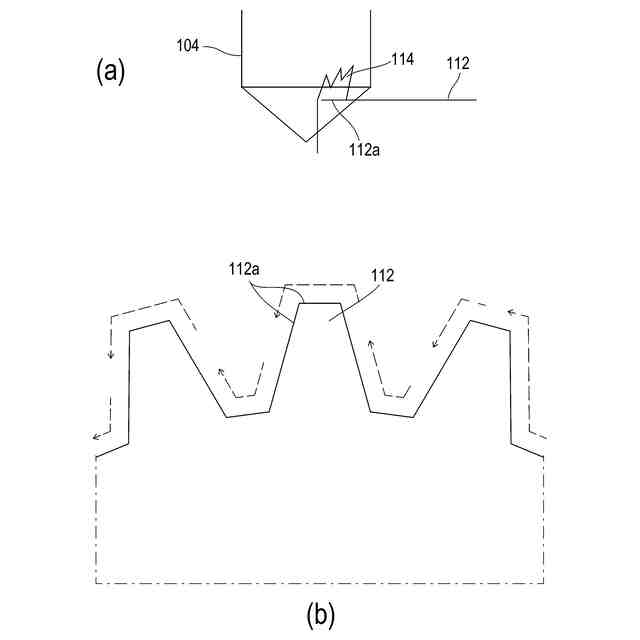
図1のエッジ仕上げ装置によるバリ取りまたは面取りの加工状態を説明する図
図1のエッジ仕上げ装置の動作を示すフローチャート
【発明を実施するための形態】
【0010】
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値などは、発明の理解を容易とするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書および図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
ロボット
1か月前
株式会社不二越
エンドミル
17日前
株式会社不二越
歯車加工装置
12日前
株式会社不二越
歯車加工装置
12日前
株式会社不二越
X線測定装置
17日前
株式会社不二越
歯車加工装置
12日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
噛み込み検知装置
25日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
垂直多関節ロボット
4日前
株式会社不二越
複合アクチュエータ
1か月前
株式会社不二越
斜板式ピストンポンプ
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社不二越
固定構造および固定治具
1か月前
株式会社不二越
センサシステム及びロボットシステム
1か月前
株式会社不二越
超硬合金およびこれを用いた切削工具
1か月前
株式会社不二越
直動軸受用合金鋼およびそれを用いた直動軸受
27日前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
1か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
19日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
製函機
2か月前
株式会社不二越
ロボット
1か月前
株式会社三協システム
移載装置
2か月前
株式会社竹中工務店
補助セット
1か月前
CKD株式会社
把持装置
2か月前
トヨタ自動車株式会社
学習装置
4日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
28日前
株式会社マキタ
ハンマドリル
28日前
SMC株式会社
着脱装置
2か月前
株式会社不二越
移動ロボットシステム
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社安川電機
ロボット
25日前
株式会社不二越
エッジ仕上げ装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ