TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152611
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024054585
出願日
2024-03-28
発明の名称
ハンド
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
15/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ベース上に保持器によって物品を載置して搬送するハンドの搬送能力を向上させる。
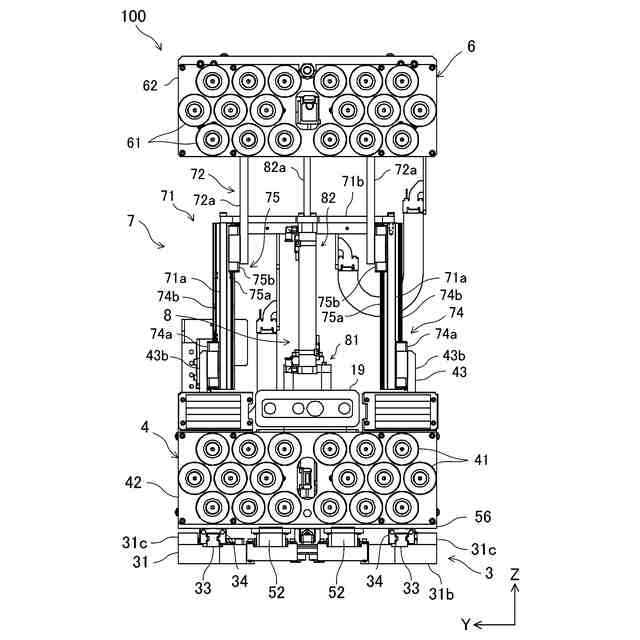
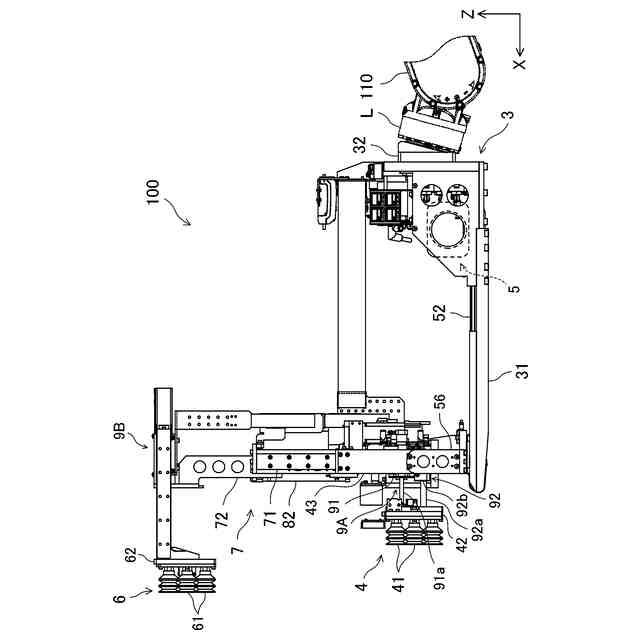
【解決手段】ハンド100は、ベース3と、ベース3に対して所定の第1方向Xへ移動可能に支持され、物品Wを保持する第1保持器4と、第1方向Xと交差する第2方向Zにおいて第1保持器4と並んで配置され、ベース3に対して第1方向Xへ移動可能に支持され、物品Wを保持する第2保持器6と、第1保持器4及び第2保持器6を第1方向Xへ移動させる第1駆動装置5と、第1保持器4及び第2保持器6の一方の第1方向Xの位置を第1保持器4及び第2保持器6の他方から独立して調節する調節装置9を備えている。
【選択図】図2
特許請求の範囲
【請求項1】
ベースと、
前記ベースに対して所定の第1方向へ移動可能に支持され、物品を保持する第1保持器と、
前記第1方向と交差する第2方向において前記第1保持器と並んで配置され、前記ベースに対して前記第1方向へ移動可能に支持され、物品を保持する第2保持器と、
前記第1保持器及び前記第2保持器を前記第1方向へ移動させる第1駆動装置と、
前記第1保持器及び前記第2保持器の一方の前記第1方向の位置を前記第1保持器及び前記第2保持器の他方から独立して調節する調節装置を備えるハンド。
続きを表示(約 750 文字)
【請求項2】
請求項1に記載のハンドにおいて、
前記調節装置は、前記第1保持器の前記第1方向の位置を前記第2保持器から独立して調節する第1調節装置と、前記第2保持器の前記第1方向の位置を前記第1保持器から独立して調節する第2調節装置とを含むハンド。
【請求項3】
請求項2に記載のハンドにおいて、
前記第1調節装置による前記第1保持器の前記第1方向の位置の最大調節量は、前記第2調節装置による前記第2保持器の前記第1方向の位置の最大調節量と異なるハンド。
【請求項4】
請求項2に記載のハンドにおいて、
前記第1調節装置の調節によって前記ベースから前記第1方向へ最も進出したときの前記第1保持器の前記第1方向の位置は、前記第2調節装置の調節によって前記ベースから前記第1方向へ最も進出したときの前記第2保持器の前記第1方向の位置と異なるハンド。
【請求項5】
請求項4に記載のハンドにおいて、
前記第2方向は、上下方向であり、
前記第2保持器は、前記第1保持器よりも上方に配置され、
前記第2調節装置の調節によって前記ベースから前記第2方向へ最も離れたときの前記第2保持器の前記第1方向の位置は、前記第1調節装置の調節によって前記ベースから前記第1方向へ最も離れたときの前記第1保持器の前記第1方向の位置に比べて、前記ベースから前記第1方向へより離れているハンド。
【請求項6】
請求項1乃至5の何れか1つに記載のハンドにおいて、
前記第2保持器を前記第2方向へ移動可能に支持するガイドと、
前記第2保持器を前記第2方向へ移動させる第2駆動装置とをさらに備えたハンド。
発明の詳細な説明
【技術分野】
【0001】
ここに開示された技術は、ハンドに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来より、物品を保持する保持器を備えたハンドが知られている。例えば、特許文献1には、物品を保持する保持器と物品を載置するベースとを有するハンドが開示されている。このハンドは、物品を保持した状態の保持器を所定の方向へ移動させ、物品をベース上に載置する。ハンドは、物品をベース上に載置した状態で搬送する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2021/025019号
【発明の概要】
【発明が解決しようとする課題】
【0004】
前述のハンドは、保持器を拡大することによって、様々なサイズの物品を保持できるように構成されている。しかしながら、ハンドの搬送能力にはさらなる向上が望まれており、前述のようなハンドにはさらなる改善の余地が残されている。
【0005】
ここに開示された技術は、かかる点に鑑みてなされたものであり、その目的とするところは、保持器によって物品をベース上に載置して搬送するハンドの搬送能力を向上させることにある。
【課題を解決するための手段】
【0006】
ここに開示されたハンドは、ベースと、前記ベースに対して所定の第1方向へ移動可能に支持され、物品を保持する第1保持器と、前記第1方向と交差する第2方向において前記第1保持器と並んで配置され、前記ベースに対して前記第1方向へ移動可能に支持され、物品を保持する第2保持器と、前記第1保持器及び前記第2保持器を前記第1方向へ移動させる第1駆動装置と、前記第1保持器及び前記第2保持器の一方の前記第1方向の位置を前記第1保持器及び前記第2保持器の他方から独立して調節する調節装置を備える。
【発明の効果】
【0007】
前記ハンドによれば、搬送能力を向上させることができる。
【図面の簡単な説明】
【0008】
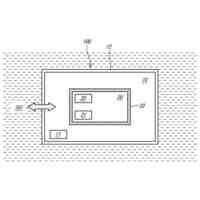
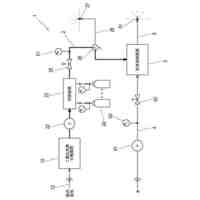
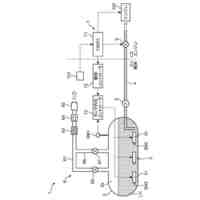
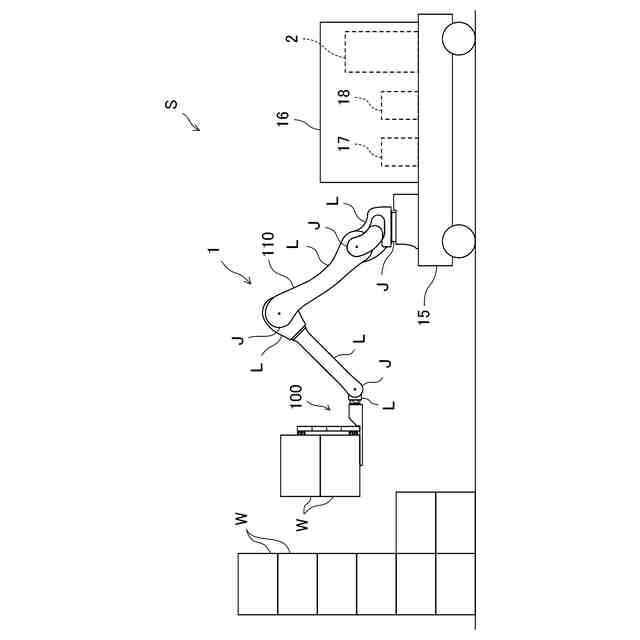
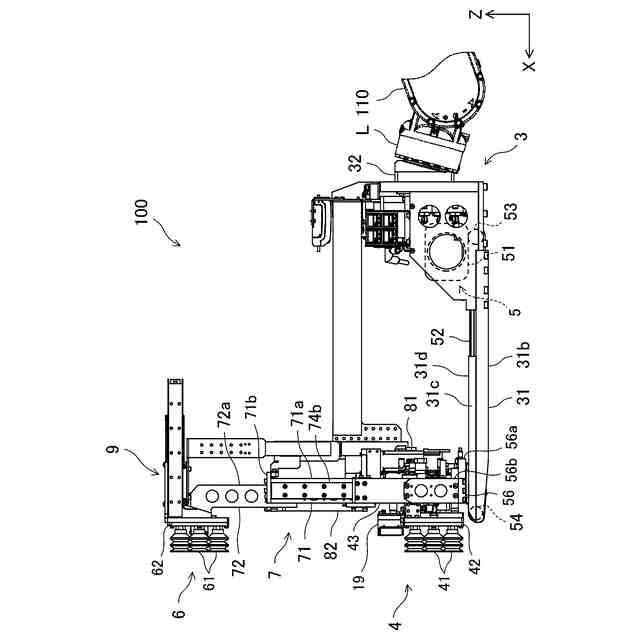
図1は、ロボットシステムの構成を示す図である。
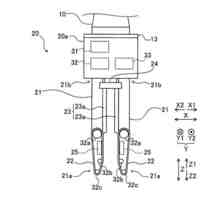
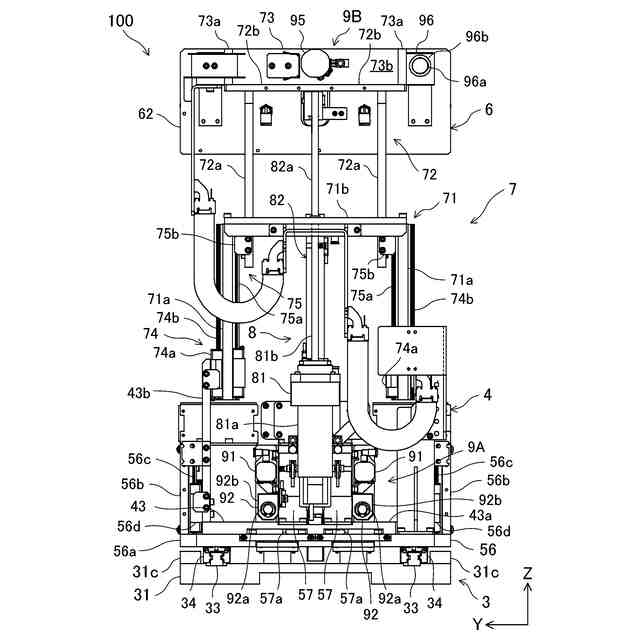
図2は、第2保持器が上昇した状態のハンドの正面図である。
図3は、第1保持器及び第2保持器が進出し且つ第2保持器6上昇した状態のハンドの側面図である。
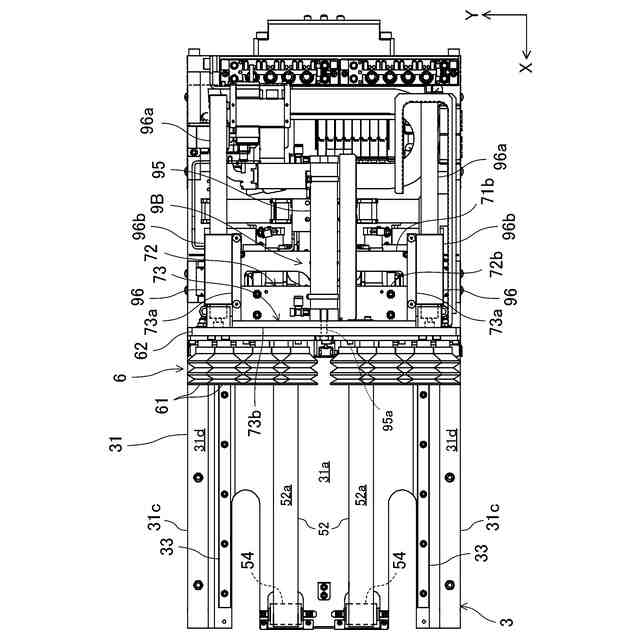
図4は、第1保持器及び第2保持器が後退した状態のハンドの平面図である。
図5は、第2保持器が上昇した状態のハンドの背面図である。
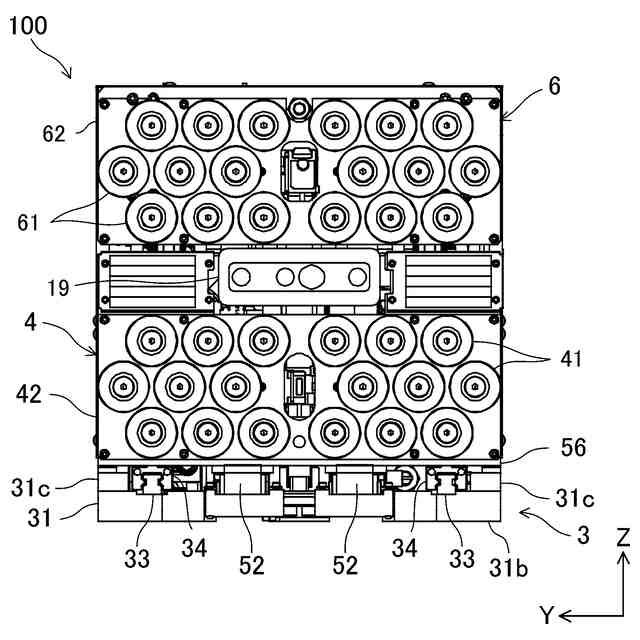
図6は、第2保持器が下降した状態のハンドの正面図である。
図7は、第1保持器及び第2保持器が調節装置によって第1方向へ進出した状態のハンドの側面図である。
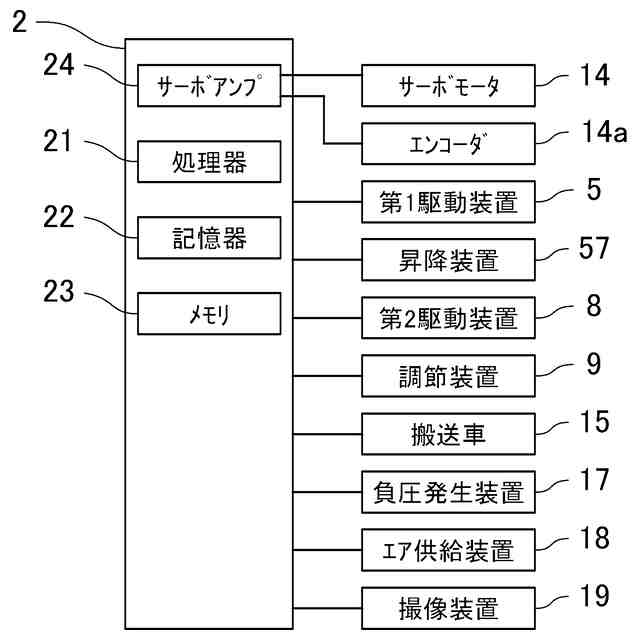
図8は、制御装置の概略的なハードウェア構成を示す図である。
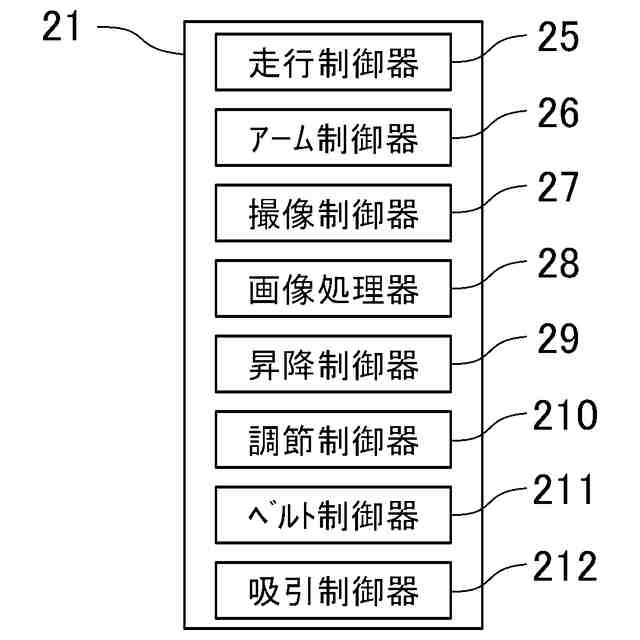
図9は、処理器の機能ブロック図である。
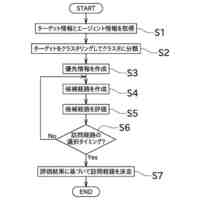
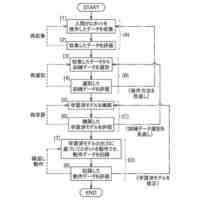
図10は、物品の移送のフローチャートである。
【発明を実施するための形態】
【0009】
以下、例示的な実施形態を図面に基づいて詳細に説明する。図1は、ロボットシステムSの構成を示す図である。
【0010】
ロボットシステムSは、物品を移送するシステムである。ここでは、所定の位置に積み上げられた物品Wを目的位置に移送する場合について説明する。物品Wは、例えば、段ボール箱である。ロボットシステムSは、物品Wを移送するロボット1と、ロボット1を制御する制御装置2とを備えている。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水中構造体
6日前
川崎重工業株式会社
遠心式ターボ機械
5日前
川崎重工業株式会社
ワーク搬送ロボット
25日前
川崎重工業株式会社
ダイクッション装置
5日前
川崎重工業株式会社
廃棄物処理システム
18日前
川崎重工業株式会社
多段遠心ターボ機械
11日前
川崎重工業株式会社
バーナおよび燃焼器
6日前
川崎重工業株式会社
ガスタービンエンジン
7日前
川崎重工業株式会社
航空機の電気機械システム
7日前
川崎重工業株式会社
支援システムおよび支援方法
25日前
川崎重工業株式会社
付加製造方法及び付加製造装置
5日前
川崎重工業株式会社
経路作成方法及び経路作成装置
25日前
川崎重工業株式会社
クローズドインペラの製造方法
8日前
川崎重工業株式会社
付加製造方法及び付加製造装置
5日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
5日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
5日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
25日前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
7日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
25日前
川崎重工業株式会社
ポペット弁装置、及びそれを備える液圧駆動システム
21日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
5日前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
今日
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
5日前
川崎重工業株式会社
学習済モデルの構築方法
4日前
川崎重工業株式会社
水素航空機の燃料供給システム
13日前
川崎重工業株式会社
摩擦攪拌ツールの制御方法及び摩擦攪拌装置
21日前
川崎重工業株式会社
状態監視装置、状態監視方法及び状態監視プログラム
21日前
個人
折りたたみ工具
1か月前
個人
フラワーホッチキス。
21日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
製函機
1か月前
CKD株式会社
把持装置
1か月前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
株式会社三協システム
移載装置
1か月前
株式会社不二越
ロボット操作装置
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ