TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025155804
公報種別
公開特許公報(A)
公開日
2025-10-14
出願番号
2024231978,2024575371
出願日
2024-12-27,2024-12-17
発明の名称
状態監視装置、状態監視方法及び状態監視プログラム
出願人
川崎重工業株式会社
代理人
個人
主分類
B25J
19/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】実作業のためのプログラムを実行してロボットを動作させる過程で、残存寿命を予測するためのデータを収集する。
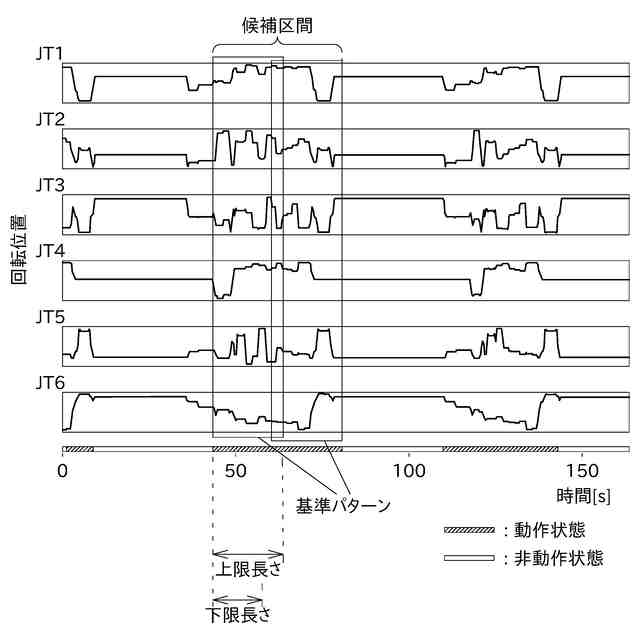
【解決手段】ロボットの動作状態が判定され、動作状態が継続している時間である動作状態時間が計測される。動作状態時間を基本データ上限長さで除することにより、基本データ取得数が算出される。動作状態時間に相当する各軸の位置時系列データから、基本データ取得数だけ基本データが取得される。繰返し再生される各軸の位置時系列データと基本データとがマッチングした場合、マッチングした時間区間のロボットの状態を反映する、各軸の状態信号の時系列データが取得される。この時系列データから評価値が計算される。評価値が時間の経過に伴って変化する傾向を表すトレンドラインが作成され、このトレンドラインが寿命閾値に到達するタイミングが、予測寿命タイミングとして求められる。
【選択図】図6
特許請求の範囲
【請求項1】
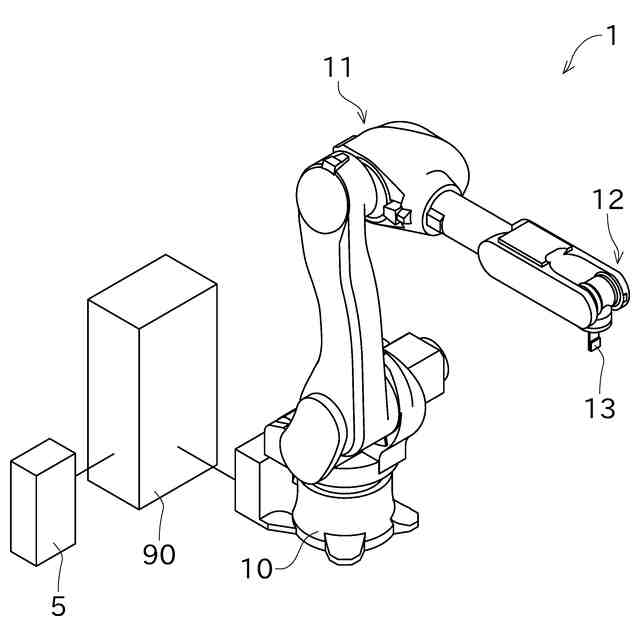
予め決められた動作を再生可能なロボットの状態を監視する状態監視装置であって、
前記ロボットの動作状態を判定し、前記ロボットの動作状態が継続している時間である動作状態時間を計測する動作状態時間計測部と、
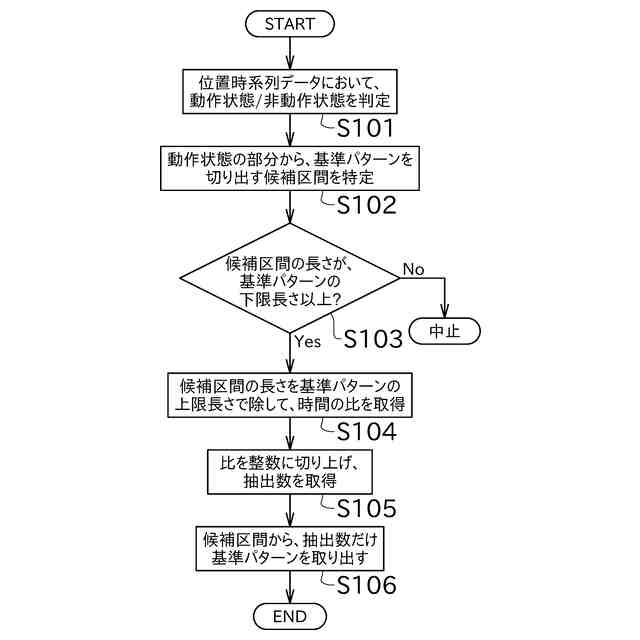
前記動作状態時間を予め設定した基本データ上限長さで除して基本データ取得数を算出し、前記動作状態時間に相当する前記ロボットの動作状態の各軸の位置時系列データから、基本データを前記基本データ取得数だけ取得し、少なくとも1つの基本データを記憶する基本データ処理部と、
繰返し再生される各軸の位置時系列データを取得し、前記記憶された基本データとのマッチングの有無を判断する探索処理部と、
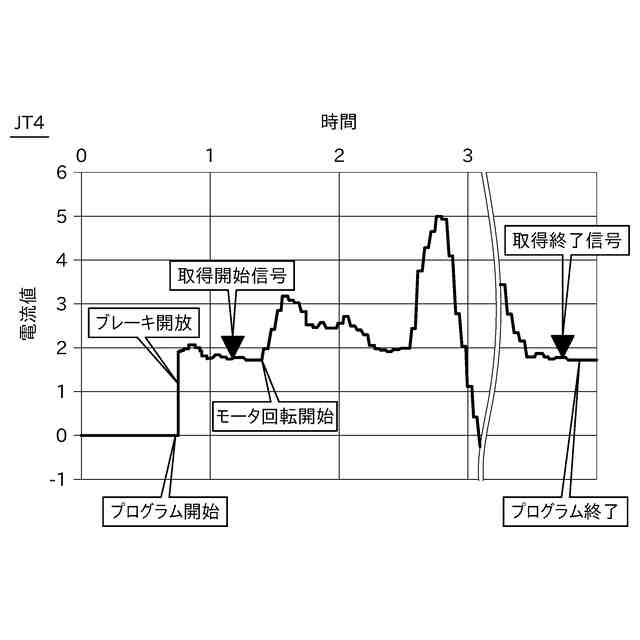
前記基本データとマッチングした時間区間の前記ロボットの状態を反映する各軸の状態信号の時系列データを取得する時系列データ取得部と、
前記時系列データ取得部により取得された前記時系列データに基づいて、前記ロボットの状態評価のための評価値を取得する評価値計算部と、
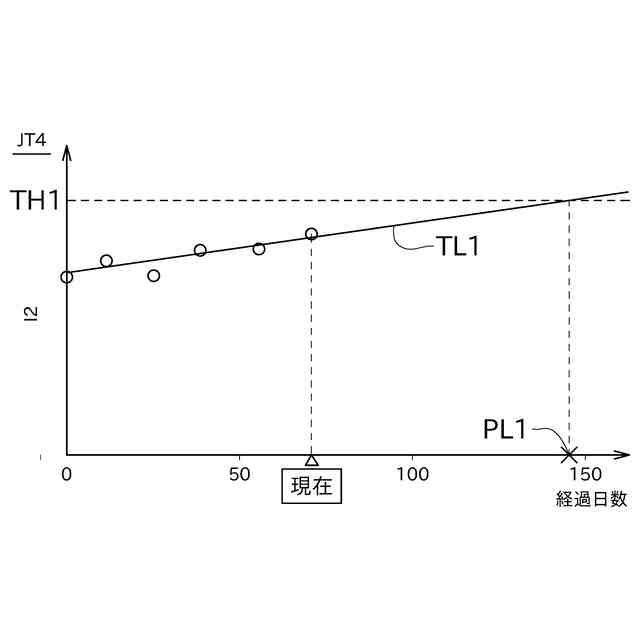
前記評価値が時間の経過に伴って変化する傾向を表すトレンドラインを作成して、当該トレンドラインが所定の寿命閾値に到達するタイミングを予測寿命タイミングとして求める寿命推定部と、
を備える、状態監視装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の状態監視装置であって、
繰返し再生される各軸の状態信号を監視する動作変更監視部をさらに備え、
前記動作変更監視部は、ロボットの状態を反映する各軸の状態信号において前記基本データとマッチングする部分の出現の有無を監視し、
予め定めた監視期間での前記出現の回数が一定以下である場合、前記基本データ処理部は新しく基本データを取得し、前記出現の回数が一定以下の前記基本データと入れ替える、状態監視装置。
【請求項3】
請求項1に記載の状態監視装置であって、
前記ロボットが有する複数の軸のうち1以上の軸が動いている場合に、前記ロボットが動作状態であると判定する、状態監視装置。
【請求項4】
請求項1に記載の状態監視装置であって、
前記ロボットが有する全ての軸が所定時間以上停止している場合に、前記ロボットが動作状態でないと判定する、状態監視装置。
【請求項5】
請求項1に記載の状態監視装置であって、
前記ロボットが有する複数の軸の全てが動いている場合に、前記ロボットが動作状態であると判定する、状態監視装置。
【請求項6】
請求項1に記載の状態監視装置であって、
ロボットの動作状態を判定する対象の期間のうち最初の所定時間は、前記ロボットが動作状態にあると判定しない、状態監視装置。
【請求項7】
請求項1に記載の状態監視装置であって、
前記基本データ取得数は、動作状態時間を前記基本データ上限長さで除した値の小数点以下を切り上げて整数とした値である、状態監視装置。
【請求項8】
請求項7に記載の状態監視装置であって、
前記基本データ処理部は、前記位置時系列データから、複数の前記基本データを互いにオーバーラップするように取り出す、状態監視装置。
【請求項9】
請求項1に記載の状態監視装置であって、
前記基本データ取得数は、動作状態時間を前記基本データ上限長さで除した値の小数点以下を切り捨てて整数とした値である、状態監視装置。
【請求項10】
請求項1に記載の状態監視装置であって、
前記基本データ処理部は、前記動作状態時間に相当する前記ロボットの動作状態の各軸の位置時系列データから、前記基本データを1つ取得し、前記基本データを記憶する、状態監視装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、主として、ロボットの寿命予測に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
産業用ロボットを工場等で反復的に稼動させると、ロボットの各部(例えば、機械部品)が劣化していくことが避けられない。状況が進行すると、やがてロボットが故障する。ロボットが故障してラインが長期間停止した場合、大きな損失となることから、ロボットの故障発生前にメンテナンス(保全)を実施することが強く求められている。一方で、メンテナンスを頻繁に行うことも、メンテナンス費用等の観点から困難である。
【0003】
適切なタイミングでメンテナンスを行うために、ロボットの減速機等の残存寿命を予測するための装置が提案されている。特許文献1は、この種のロボット保守支援装置を開示する。
【0004】
特許文献1のロボット保守支援装置は、ロボット駆動系を構成するサーボモータの電流指令値のデータに基づいて電流指令値の将来の変化傾向を診断し、診断された変化傾向に基づいて、電流指令値が、予め設定された値に到達するまでの期間を判定する構成となっている。
【先行技術文献】
【特許文献】
【0005】
特開2016-117148公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1のような装置を用いて残存寿命を予測するためには、ロボットを実際に動作させ、評価のためのデータ(例えば、前述の電流指令値)を収集する必要がある。
【0007】
データ収集のために、ロボットを動作させる特別なプログラムを予め定めておくことが考えられる。ロボットは、専用のプログラムが定期又は不定期に実行されることで、評価のための一定の動作パターンを再生する。しかし、この場合、ロボットに実作業とは異なる特別な動作をさせる必要があり、稼動効率の低下が避けられない。
【0008】
本開示は以上の事情に鑑みてされたものであり、その主な目的は、実作業のためのプログラムを実行してロボットを動作させる過程で、残存寿命を予測するためのデータを収集することにある。
【課題を解決するための手段】
【0009】
本開示の解決しようとする課題は以上の如くであり、次にこの課題を解決するための手段とその効果を説明する。
【0010】
本開示の観点によれば、以下の構成の状態監視装置が提供される。即ち、この状態監視装置は、予め決められた動作を再生可能なロボットの状態を監視する。前記状態監視装置は、動作状態時間計測部と、基本データ処理部と、探索処理部と、時系列データ取得部と、評価値計算部と、寿命推定部と、を備える。前記動作状態時間計測部は、前記ロボットの動作状態を判定し、前記ロボットの動作状態が継続している時間である動作状態時間を計測する。前記基本データ処理部は、前記動作状態時間を予め設定した基本データ上限長さで除して基本データ取得数を算出し、前記動作状態時間に相当する前記ロボットの動作状態の各軸の位置時系列データから、基本データを前記基本データ取得数だけ取得し、少なくとも1つの基本データを記憶する。前記探索処理部は、繰返し再生される各軸の位置時系列データを取得し、前記記憶された基本データとのマッチングの有無を判断する。前記時系列データ取得部は、前記基本データとマッチングした時間区間の前記ロボットの状態を反映する各軸の状態信号の時系列データを取得する。前記評価値計算部は、前記時系列データ取得部により取得された前記時系列データに基づいて、前記ロボットの状態評価のための評価値を取得する。前記寿命推定部は、前記評価値が時間の経過に伴って変化する傾向を表すトレンドラインを作成して、当該トレンドラインが所定の寿命閾値に到達するタイミングを予測寿命タイミングとして求める。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
情報処理装置および情報提供方法
今日
川崎重工業株式会社
多段遠心圧縮機のケーシング、及び、多段遠心圧縮機
6日前
川崎重工業株式会社
モータ制御システム、ロボットシステム、および、モータ制御方法
今日
株式会社Eサーモジェンテック
熱電発電システムの製造方法
19日前
川崎重工業株式会社
手術支援システム、手術支援システムの制御方法およびプログラム
12日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
21日前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
学習装置
6日前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社安川電機
ロボット
27日前
株式会社三共コーポレーション
工具保持具
21日前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
6日前
アネックスツール株式会社
ドライバービット
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
トヨタ自動車株式会社
ロボットハンド
27日前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
回転打撃工具
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
セイコーエプソン株式会社
ロボット
1か月前
NTN株式会社
ハンド
1か月前
山九株式会社
レンチ保持治具
1か月前
NTN株式会社
作業装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ