TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025158471
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024061037
出願日
2024-04-04
発明の名称
ロボットに用いる伝送路
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20251009BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットに用いる伝送路のノイズ耐性を向上させる。
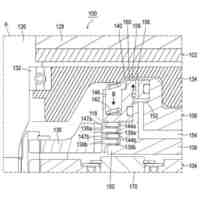
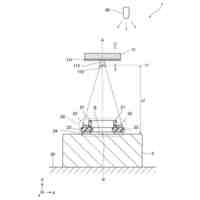
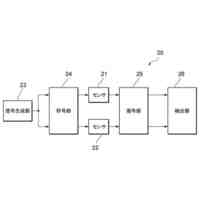
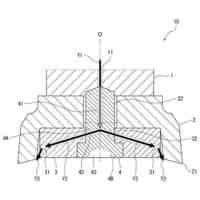
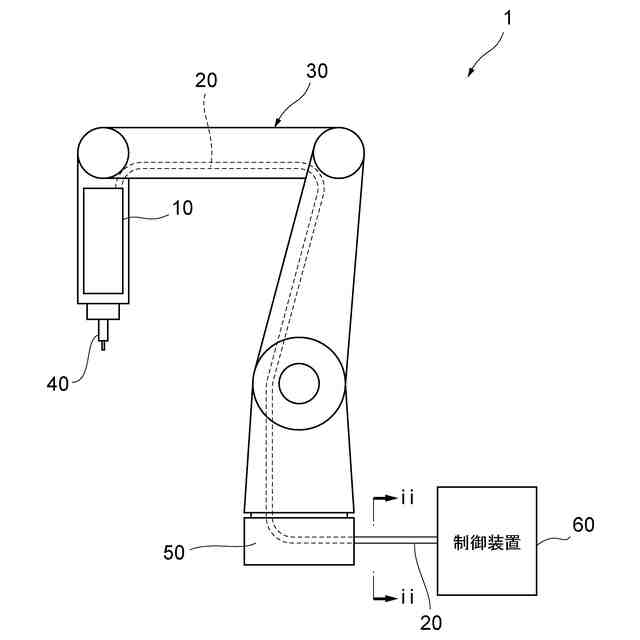
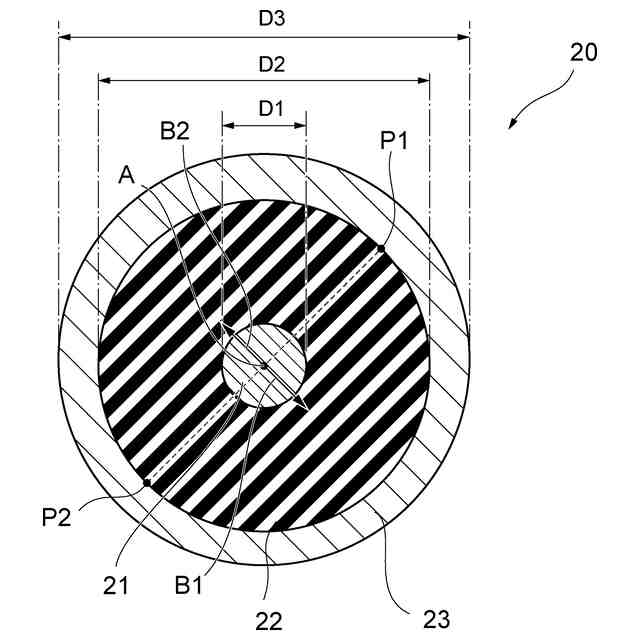
【解決手段】伝送路(20)は、信号線(21)と、円筒状の絶縁材料によって形成されており、かつ信号線の外周面を覆うように設けられる絶縁層(22)と、絶縁層の外周面を覆うように、かつ信号線及び絶縁層と同軸的に設けられるとともに、ロボット(1)に搭載された近接センサ(10)に電力を供給する円筒状の電力線(23)とを備える。
【選択図】図2
特許請求の範囲
【請求項1】
信号線と、
円筒状の絶縁材料によって形成されており、かつ前記信号線の外周面を覆うように設けられる絶縁層と、
前記絶縁層の外周面を覆うように、かつ前記信号線及び前記絶縁層と同軸的に設けられるとともに、ロボットに搭載された近接センサに電力を供給する円筒状の電力線と、
を備えることを特徴とするロボットに用いる伝送路。
続きを表示(約 330 文字)
【請求項2】
前記近接センサは、静電容量センサであり、
前記信号線は、前記静電容量センサとの間で信号を伝送することを特徴とする請求項1に記載のロボットに用いる伝送路。
【請求項3】
前記電力線は、ロボットにおける可動アームのフレームの内側に設けられていることを特徴とする請求項1又は2に記載のロボットに用いる伝送路。
【請求項4】
前記絶縁層は、外径が前記信号線の外径よりも大きく前記信号線の外径の2倍以下であることを特徴とする請求項1又は2に記載のロボットに用いる伝送路。
【請求項5】
前記電力線は、回路基板用のスペーサであることを特徴とする請求項1又は2に記載のロボットに用いる伝送路。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに用いる伝送路に関する。
続きを表示(約 970 文字)
【背景技術】
【0002】
従来から、複数の信号線を含んで構成される伝送路が知られている。また、物体とセンサとの間に発生する静電容量の変化を検出することによって、物体を検出する静電容量方式の近接センサが知られている。
【0003】
これに関し、特許文献1に、複数の信号線が撚られてなる撚線と、撚線の側周を囲うように撚線と同心の円周上に分配され、撚線を中心にして撚られてなる複数の電力線複合ケーブルとを備える信号ケーブルが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2018-85302号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、静電容量方式の近接センサは、物体の検出に伴う電圧の変化が極めて微小であり、電力線などに発生するノイズの影響を受け易い。特許文献1に記載の技術では、信号ケーブルを静電容量方式の近接センサに用いる場合、電圧が変化した場合に、物体検出に伴う電圧の変化か又は電力線に発生したノイズかの判別が難しいという問題があった。
【0006】
本発明はこのような問題に鑑みてなされたものであり、その目的は、ノイズ耐性を向上させることができるロボットに用いる伝送路を提供することにある。
【課題を解決するための手段】
【0007】
上記課題を解決するために、信号線と、円筒状の絶縁材料によって形成されており、かつ前記信号線の外周面を覆うように設けられる絶縁層と、前記絶縁層の外周面を覆うように、かつ前記信号線及び前記絶縁層と同軸的に設けられるとともに、ロボットに搭載された近接センサに電力を供給する円筒状の電力線と、を備える。
【0008】
また、前記近接センサは、静電容量センサであり、前記信号線は、前記静電容量センサとの間で信号を伝送する。
【0009】
また、前記電力線は、ロボットにおける可動アームのフレームの内側に設けられている。
【0010】
また、前記絶縁層は、外径が前記信号線の外径よりも大きく前記信号線の外径の2倍以下である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社不二越
ロボット
1か月前
株式会社不二越
エンドミル
23日前
株式会社不二越
流路切換弁
2日前
株式会社不二越
歯車加工装置
18日前
株式会社不二越
歯車加工装置
18日前
株式会社不二越
歯車加工装置
18日前
株式会社不二越
X線測定装置
23日前
株式会社不二越
噛み込み検知装置
1か月前
株式会社不二越
回転駆動システム
4日前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
X線測定システム
1か月前
株式会社不二越
垂直多関節ロボット
10日前
株式会社不二越
斜板式ピストンポンプ
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社不二越
固定構造および固定治具
1か月前
株式会社不二越
ダイヤモンド膜の密着性能評価方法
4日前
株式会社不二越
センサシステム及びロボットシステム
1か月前
株式会社不二越
超硬合金およびこれを用いた切削工具
1か月前
株式会社不二越
歯切工具用部品およびそれを用いた歯切工具
2日前
株式会社不二越
冷間金型用合金鋼およびそれを用いた冷間金型
1か月前
株式会社不二越
直動軸受用合金鋼およびそれを用いた直動軸受
1か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
25日前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
学習装置
10日前
株式会社竹中工務店
補助セット
1か月前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社不二越
移動ロボットシステム
2か月前
瓜生製作株式会社
電動締付工具
3日前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
1か月前
株式会社安川電機
ロボット
1か月前
本田技研工業株式会社
装置
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ