TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025130916
公報種別
公開特許公報(A)
公開日
2025-09-09
出願番号
2024028311
出願日
2024-02-28
発明の名称
把持装置
出願人
株式会社ミクロブ
,
兵庫県
代理人
個人
主分類
B25J
15/08 20060101AFI20250902BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】簡素な構成でアーム部材を繊細に開閉できる手持ち式の把持装置を提供する。
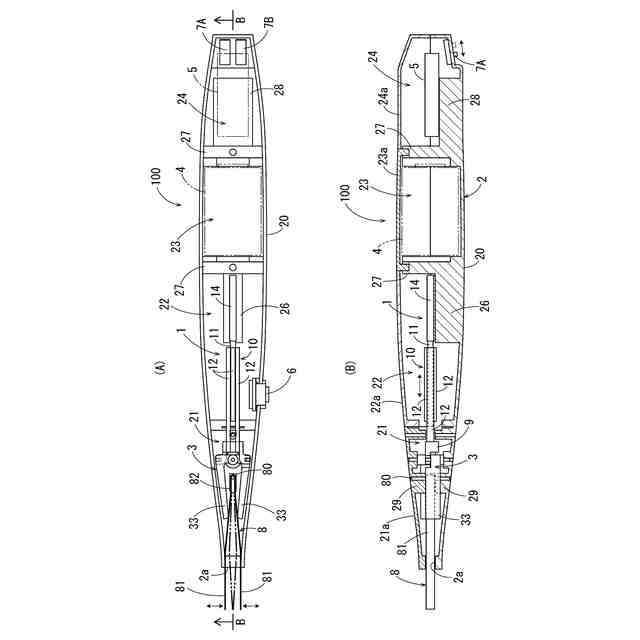
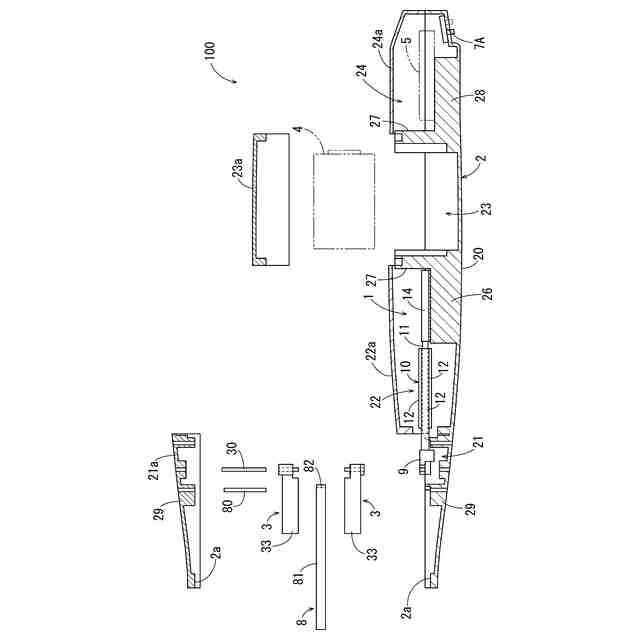
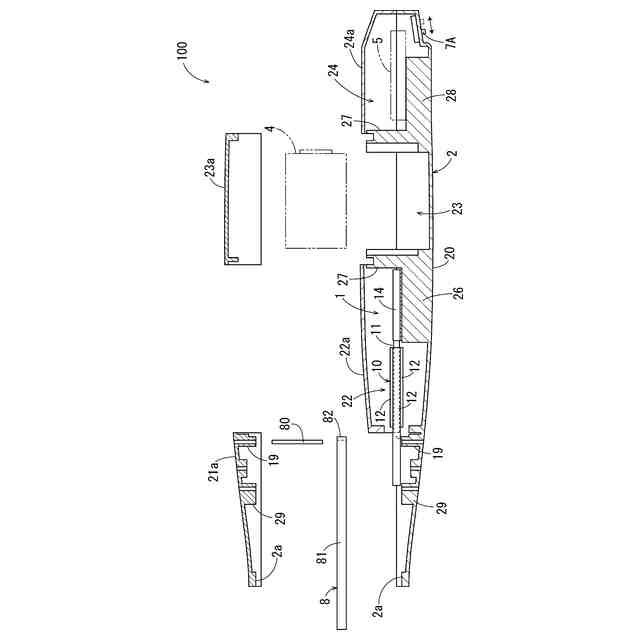
【解決手段】手持ち式の把持装置100は、駆動軸11の一端に固定されて電気信号を機械的な振動に変換する圧電素子14の駆動によって駆動軸11に摩擦係合した摩擦部材12と駆動軸11とを駆動軸11の軸方向に相対移動させる駆動装置1と、駆動装置1を収納するケース2と、駆動軸11の他端側でケース2に支持されるとともに駆動軸11と摩擦部材12の相対移動によって開閉する一対のアーム部材3と、圧電素子14に対して駆動軸11とは反対側でケース2内に収納される電池4と、ケース2に収納されて圧電素子14の駆動を制御するための回路基板5と、ケース2の外壁に設けられて圧電素子14を振動及び停止させる操作スイッチ6と、を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
駆動軸の一端に固定されて電気信号を機械的な振動に変換する圧電素子の駆動によって前記駆動軸に摩擦係合した摩擦部材と前記駆動軸とを前記駆動軸の軸方向に相対移動させる駆動装置と、
前記駆動装置を収納するケースと、
前記駆動軸の他端側で前記ケースに支持されるとともに前記駆動軸と前記摩擦部材の相対移動によって開閉する一対のアーム部材と、
前記圧電素子に対して前記駆動軸とは反対側で前記ケース内に収納される電池と、
前記ケースに収納されて前記圧電素子の駆動を制御するための回路基板と、
前記ケースの外壁に設けられて前記圧電素子を振動及び停止させる操作スイッチと、を備えた手持ち式の把持装置。
続きを表示(約 970 文字)
【請求項2】
前記電池による前記回路基板への電力の供給を入り切りする電源スイッチと、前記駆動装置の動作様式を変化させる動作設定部材のうち少なくとも一方を備え、
前記ケースの外壁において、前記操作スイッチは前記アーム部材寄りの位置に設けられる一方、前記電源スイッチ及び前記動作設定部材は前記電池よりも前記アーム部材から離れた位置に設けられる、
請求項1に記載の把持装置。
【請求項3】
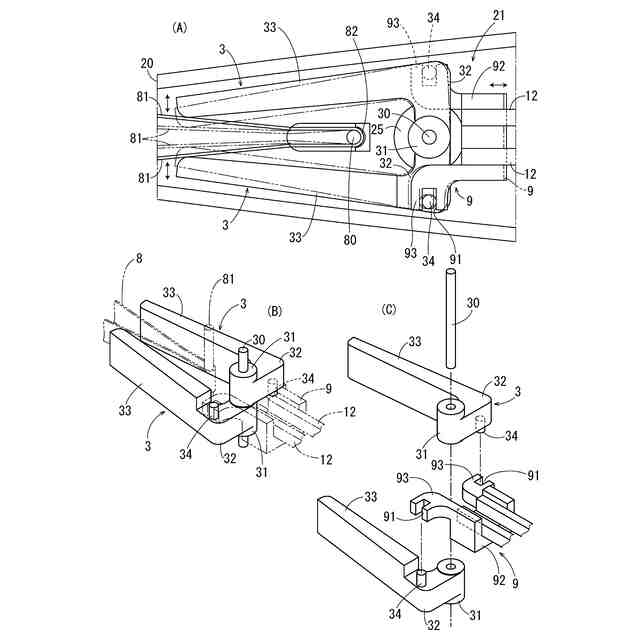
前記摩擦部材又は前記駆動軸に連結されて、前記駆動軸と前記摩擦部材の相対移動によって前記駆動軸の軸方向に沿って移動するカム板を備え、
前記アーム部材は、前記ケースに設けた支軸に回動自在に支持されるアーム支点部と、前記支点部の左右外側に設けたアーム中間部と、前記中間部から前記ケースの先端側へ延出したアーム開閉部と、前記中間部に突設されて前記カム板に設けた左右のカム溝に嵌合するカム従動子とを備えている、
請求項1又は2に記載の把持装置。
【請求項4】
基端部が左右の前記アーム開閉部の先端部位よりも前記アーム支点部寄りの位置で前記ケースに固定されるとともに、先端部同士が互いに間隔をあけて設けられた左右一対の板状弾性部材を備え、
前記左右一対の板状弾性部材は、前記アーム部材の開閉動作に応じて前記板状弾性部材の長手方向中途部に前記アーム開閉部が摺接することで、先端部同士が開閉可能に設けられている、
請求項3に記載の把持装置。
【請求項5】
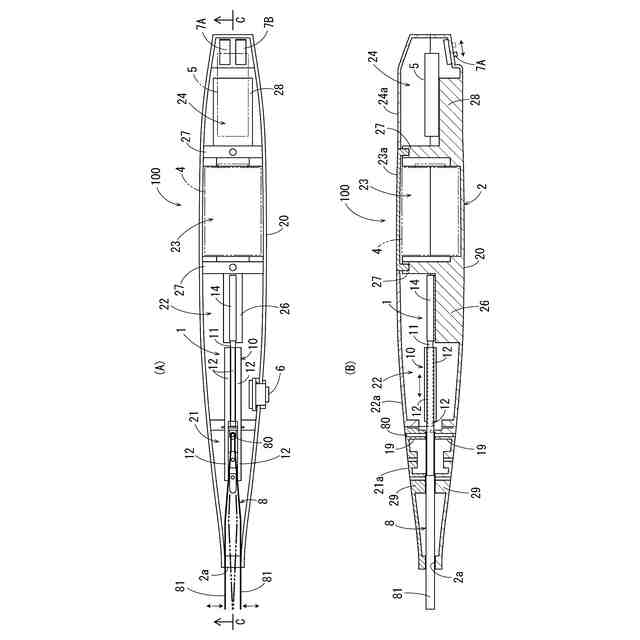
前記摩擦部材又は前記駆動軸に連結されて、前記駆動軸と前記摩擦部材の相対移動によって前記駆動軸の軸方向に沿って摺動可能であって、前記圧電素子とは反対側のスライダー先端部が左右に二股状に形成されたスライダー部材と、
基端部が前記スライダー部材の左右の先端部の間で前記ケースに固定されるとともに、先端部同士が互いに間隔をあけて設けられた、前記アーム部材としての左右一対の板状弾性部材を備え、
前記左右一対の板状弾性部材は、前記スライダー部材の摺動動作に応じて前記板状弾性部材の長手方向中途部に前記スライダー先端部が摺接することで、先端部同士が開閉可能に設けられている、
請求項1又は2に記載の把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、手持ち式の把持装置に関し、特に、電動式、かつ手持ち式の把持装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば微小部品の搬送や組み立て作業などに使用可能な把持装置として、手持ち式の電動ピンセットが提案されている(例えば特許文献1を参照)。従来の電動ピンセットは、モータ、変換機構、一対のアーム部を有する把持部材、スイッチ手段及び電池をケースに収納し、モータ軸の回転を変換機構によって往復の並進変位量に変換する。把持部材は、モータ軸が延びる方向に沿った往復の並進変位量に基づいて一対のアーム部の開閉量を拡大し、把持対象物を開放及び把持するように構成されている。
【先行技術文献】
【特許文献】
【0003】
特許4064299号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の把持装置は、モータ軸の回転量を、モータ軸が延びる方向に沿った往復の並進変位量に変換する変換機構が必要であることから、構造が複雑であるとともに、アーム部の繊細な開閉が困難であるという問題があった。
【課題を解決するための手段】
【0005】
本発明は、このような現状を改善すべく、簡素な構成でアーム部材を繊細に開閉できる手持ち式の把持装置を提供することを技術的課題としている。
【0006】
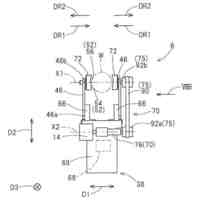
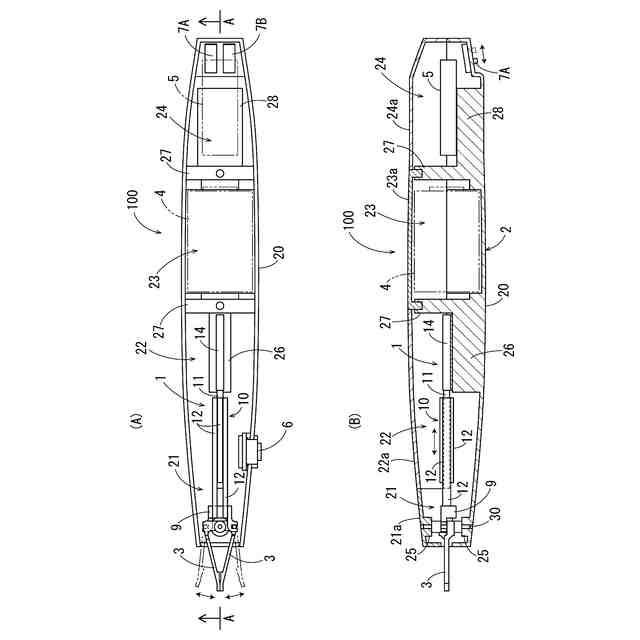
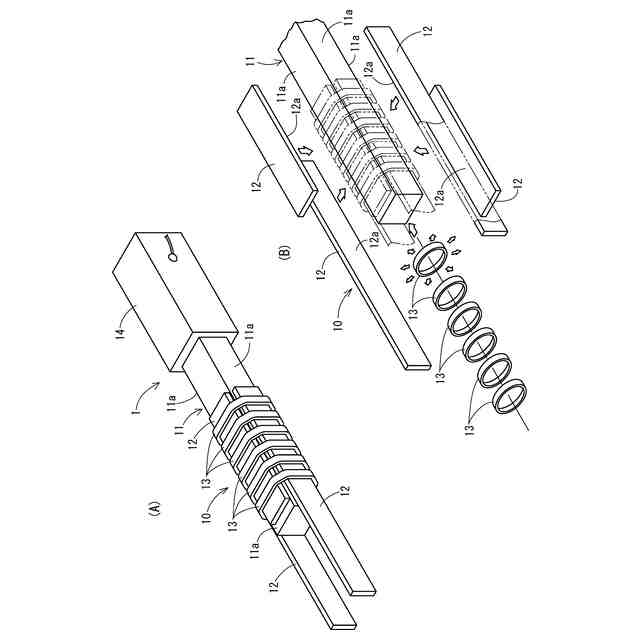
本発明の一実施態様の手持ち式の把持装置は、駆動軸の一端に固定されて電気信号を機械的な振動に変換する圧電素子の駆動によって前記駆動軸に摩擦係合した摩擦部材と前記駆動軸とを前記駆動軸の軸方向に相対移動させる駆動装置と、前記駆動装置を収納するケースと、前記駆動軸の他端側で前記ケースに支持されるとともに前記駆動軸と前記摩擦部材の相対移動によって開閉する一対のアーム部材と、前記圧電素子に対して前記駆動軸とは反対側で前記ケース内に収納される電池と、前記ケースに収納されて前記圧電素子の駆動を制御するための回路基板と、前記ケースの外壁に設けられて前記圧電素子を振動及び停止させる操作スイッチと、を備えたものである。
【0007】
上記一実施態様の把持装置は、一端に圧電素子が固定された駆動軸に摩擦部材を摩擦係合させた簡素な構成を有するとともに、圧電素子の駆動によって駆動軸と摩擦部材とを駆動軸の軸方向に高い分解能で相対移動できる。したがって、一実施態様の把持装置は、簡素な構成で一対のアーム部材を開閉できるとともに、アーム部材を繊細に開閉できる。また、モータ軸を回転させるモータと減速ギアが不要であるから、手持ち式の把持装置を軽量化でき、使用者の負担を低減できる。
【0008】
上記一実施態様の把持装置において、前記電池による前記回路基板への電力の供給を入り切りする電源スイッチと、前記駆動装置の動作様式を変化させる動作設定部材のうち少なくとも一方を備えているようにしても構わない。そして、前記ケースの外壁において、前記操作スイッチは前記アーム部材寄りの位置に設けられる一方、前記電源スイッチ及び前記動作設定部材は前記電池よりも前記アーム部材から離れた位置に設けられるようにしても構わない。
【0009】
このような態様によれば、当該把持装置を使用するにあたり、ケースを指で把持する使用者が操作しやすいアーム部材寄りの位置に操作スイッチを配置している。一方、使用時には操作しない電源スイッチや動作設定部材を使用者の手が触れにくい、操作スイッチや電池から離れた位置に配置している。これにより、使用時に電源スイッチや動作設定部材が意図せずに切り換わることを防止できるから、操作性が向上する。
【0010】
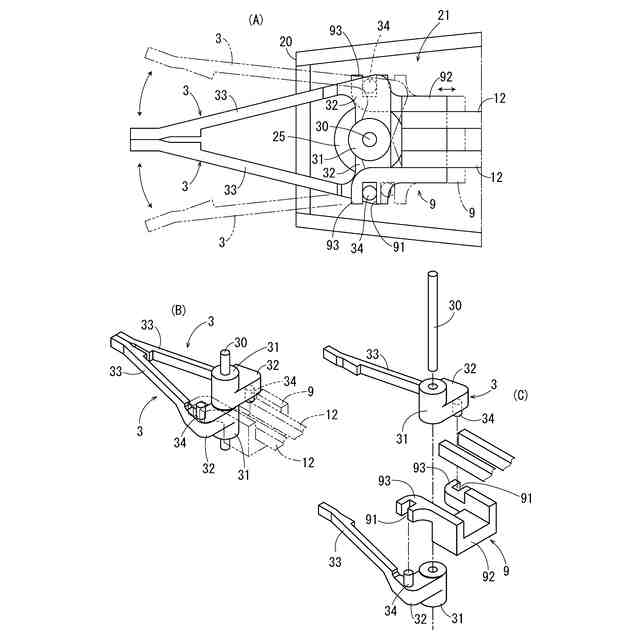
また、上記一実施態様の把持装置において、前記摩擦部材又は前記駆動軸に連結されて、前記駆動軸と前記摩擦部材の相対移動によって前記駆動軸の軸方向に沿って移動するカム板を備え、前記アーム部材は、前記ケースに設けた支軸に回動自在に支持されるアーム支点部と、前記支点部の左右外側に設けたアーム中間部と、前記中間部から前記ケースの先端側へ延出したアーム開閉部と、前記中間部に突設されて前記カム板に設けた左右のカム溝に嵌合するカム従動子とを備えているようにしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社ミクロブ
把持装置
2か月前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
19日前
川崎重工業株式会社
ロボット
1か月前
株式会社三協システム
移載装置
2か月前
株式会社竹中工務店
補助セット
1か月前
トヨタ自動車株式会社
学習装置
4日前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
28日前
株式会社マキタ
ハンマドリル
28日前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
1か月前
本田技研工業株式会社
装置
1か月前
株式会社安川電機
ロボット
25日前
川崎重工業株式会社
塗装システム
1か月前
株式会社不二越
エッジ仕上げ装置
2か月前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社不二越
垂直多関節ロボット
2か月前
株式会社三共コーポレーション
工具保持具
19日前
株式会社不二越
垂直多関節ロボット
4日前
トヨタ自動車株式会社
ロボットハンド
25日前
ライオン株式会社
移載システム
2か月前
工機ホールディングス株式会社
作業機
1か月前
アネックスツール株式会社
ドライバービット
1か月前
シンフォニアテクノロジー株式会社
搬送装置
1か月前
株式会社マキタ
回転打撃工具
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2か月前
NTN株式会社
ハンド
1か月前
山九株式会社
レンチ保持治具
1か月前
セイコーエプソン株式会社
ロボット
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ