TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025165468
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2024069505
出願日
2024-04-23
発明の名称
手持ち挟持具
出願人
個人
代理人
個人
,
個人
主分類
B25B
9/02 20060101AFI20251028BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物を挟持する際に、対象物が回転することなく、少ない力でも重い対象物を挟持することができる手持ち挟持具を提供すること。
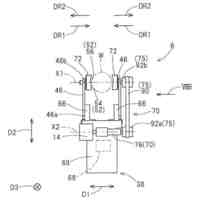
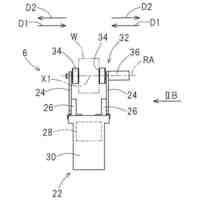
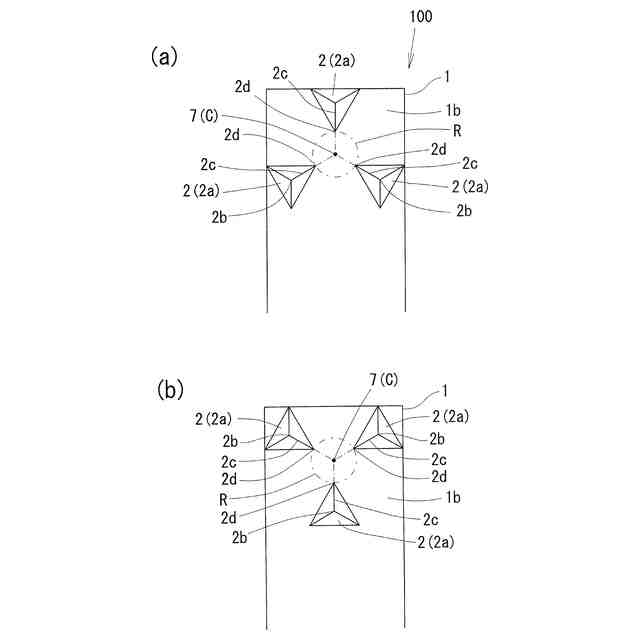
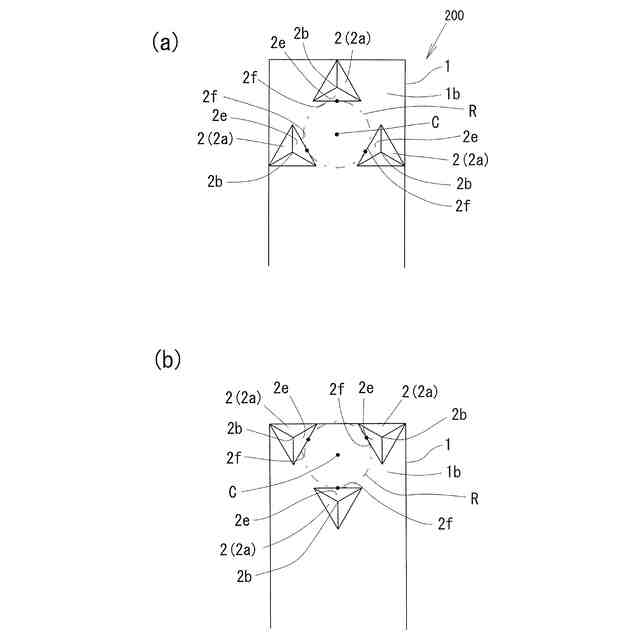
【解決手段】対象物Oを挟む一対の挟持棒1と、挟持棒1の一端部1aにおいて、対象物Oを挟持するために相対向する2つの挟持面1bと、2つの挟持面1bにそれぞれ設けられた対象物Oに接触する3つの把持部2と、を有し、3つの把持部2は、対象物Oに点接触する接触頂点2bを結ぶと、三角形となるように挟持面1b上に設けられていることを特徴としたこと。
【選択図】図1
特許請求の範囲
【請求項1】
対象物を挟む一対の挟持棒と、
前記挟持棒の一端部において、前記対象物を挟持するために相対向する2つの挟持面と、
2つの前記挟持面にそれぞれ設けられた前記対象物に接触する3つの把持部と、を有し、
3つの前記把持部は、前記対象物に点接触する接触頂点を結ぶと、三角形となるように前記挟持面上に設けられていることを特徴とする手持ち挟持具。
続きを表示(約 320 文字)
【請求項2】
前記把持部は、形状が錐体の錐体把持部であることを特徴とする請求項1に記載の手持ち挟持具。
【請求項3】
3つの前記錐体把持部は、前記錐体把持部の母線のうち、前記対象物に対して線接触する接触母線を備え、前記錐体把持部は、各前記接触母線同士が一点に向かうようにして、前記挟持面に設けられていることを特徴とする請求項2に記載の手持ち挟持具。
【請求項4】
3つの前記錐体把持部は、前記錐体把持部の側面のうち、前記対象物に対して面接触する接触側面を備え、前記錐体把持部は、各前記接触側面が前記対象物の方向を向くようにして、前記挟持面に設けられていることを特徴とする請求項2に記載の手持ち挟持具。
発明の詳細な説明
【技術分野】
【0001】
本発明は、手持ち挟持具に関するものである。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
通常、対象物を挟んで持つときは、対象物に対して一定の摩擦力を有すること、及び対象物の重心位置を捉えて挟み込みを行うことが必要である。対象物に対して一定の摩擦力を有さずに挟み込みを行っても、滑ってしまい持つことができない。また、ある程度の摩擦力を有した状態でも重心位置を捉えずに対象物に対して挟み込みを行うと、接触点が軸となり、回転モーメントが働き対象物が回転してうまく持つことができない。
【0003】
そこで、上記課題点を克服するため、特許文献1では、凸部を把持部の近傍に設けることで、把持部と凸部とにより、4点で掴むので対象物の回転を防止することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2023-000026
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1に記載のトングでは、凸部が把持部より内側に突出しているので、対象物に対して2点支持となる可能性がある。その結果、凸部が回転軸として機能し、対象物が回転する可能性があり、特に重い対象物を把持する際、回転せずに挟持するのためには力を入れる必要があった。
【0006】
そこで、本発明は上記事情を鑑みたものであって、対象物を挟持する際に、対象物が回転することなく、少ない力でも重い対象物を挟持することができる手持ち挟持具を提供するものである。
【課題を解決するための手段】
【0007】
上記課題に鑑み、本発明に係る手持ち挟持具は、対象物を挟む一対の挟持棒と、挟持棒の一端部において、対象物を挟持するために相対向する2つの挟持面と、2つの挟持面にそれぞれ設けられた対象物に接触する3つの把持部と、を有し、3つの把持部は、対象物に点接触する接触頂点を結ぶと、三角形となるように挟持面上に設けられている
【0008】
また、把持部は、形状が錐体の錐体把持部であることを特徴としたことにある。
【0009】
また、3つの錐体把持部は、錐体把持部の母線のうち、対象物に対して線接触する接触母線を備え、錐体把持部の向きが、各接触母線同士が一点に向かうようにして、挟持面に設けられていることを特徴としたことにある。
【0010】
また、3つの錐体把持部は、錐体把持部の側面のうち、前記対象物に対して面接触する接触側面を備え、錐体把持部の向きが、前記錐体把持部は、各前記接触側面が前記対象物の方向を向くようにして、挟持面に設けられていることを特徴としたことにある。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
25日前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
学習装置
10日前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
2か月前
瓜生製作株式会社
電動締付工具
3日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
1か月前
本田技研工業株式会社
装置
2か月前
株式会社三共コーポレーション
工具保持具
25日前
トヨタ自動車株式会社
軌道生成装置
1か月前
株式会社マキタ
集塵アタッチメント
2日前
株式会社不二越
垂直多関節ロボット
10日前
シンフォニアテクノロジー株式会社
搬送装置
2か月前
アネックスツール株式会社
ドライバービット
1か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
回転打撃工具
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
セイコーエプソン株式会社
ロボット
1か月前
山九株式会社
レンチ保持治具
1か月前
NTN株式会社
ハンド
2か月前
学校法人立命館
ロボットハンド制御システム
1か月前
NTN株式会社
把持装置
2か月前
株式会社マキタ
電動工具
10日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ