TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025148025
公報種別
公開特許公報(A)
公開日
2025-10-07
出願番号
2024048593
出願日
2024-03-25
発明の名称
軌道生成装置
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
5/00 20060101AFI20250930BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットなどの移動体を動作させる軌道の時間最適化の効率化を図り、また軌道の成立性の検証を正確に行う。
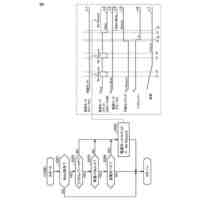
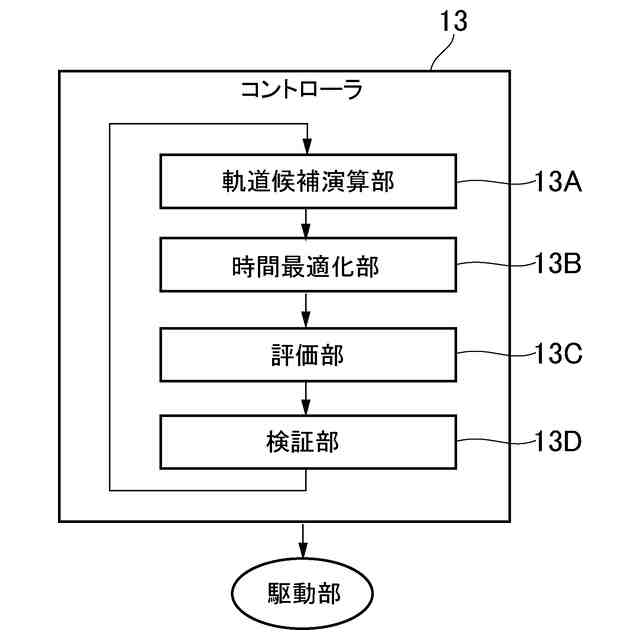
【解決手段】目標とする動作状態に到るまでの経由状態が互いに異なる複数の軌道候補を演算して求める軌道候補演算部13Aと、複数の軌道候補のそれぞれについて、駆動機構によって動作させることのできる最短の動作時間を求める最適化を行う時間最適化部13Bと、最適化されている複数の軌道候補のそれぞれについて、予め定めた評価項目で評価する評価部13Cと、評価された複数の動候補について、目標とする動作状態に到る過程における障害物の回避の成立性を検証する検証部13Dとを有し、障害物の回避の成立が検証部によって検証された複数の軌道候補のうち、評価部による評価が最も高い軌道候補を、目標とする動作状態に到るまでの軌道とする。
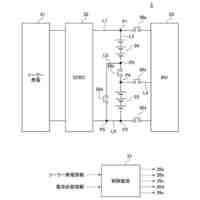
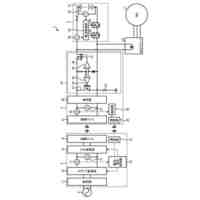
【選択図】図2
特許請求の範囲
【請求項1】
駆動機構によって所定の動作を行う移動体の目標とする動作状態に到るまでの軌道を生成する軌道生成装置であって、
前記目標とする動作状態に到るまでの経由状態が互いに異なる複数の軌道候補を演算して求める軌道候補演算部と、
複数の前記軌道候補のそれぞれについて、前記駆動機構によって動作させることのできる最短の動作時間を求める最適化を行う時間最適化部と、
前記最適化されている複数の前記軌道候補のそれぞれについて、予め定めた評価項目で評価する評価部と、
前記評価された複数の前記軌道候補について、前記目標とする動作状態に到る過程における障害物の回避の成立性を検証する検証部とを有し、
前記障害物の回避の成立が前記検証部によって検証された複数の前記軌道候補のうち、前記評価部による評価が最も高い軌道候補を、前記目標とする動作状態に到るまでの軌道とするように構成されている
ことを特徴とする軌道生成装置。
続きを表示(約 210 文字)
【請求項2】
請求項1に記載の軌道生成装置であって、
前記評価部は、前記時間最適化がなされている複数の前記軌道候補を、最適化されている前記動作時間で順序づけするように構成されている
ことを特徴とする軌道生成装置。
【請求項3】
請求項1または2に記載の軌道生成装置であって、
前記障害物は、前記移動体が存在している環境内を移動する物体を含む
ことを特徴とする軌道生成装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットなどの自律的に移動あるいは動作する移動体の動作すべき軌道を生成する装置に関するものである。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
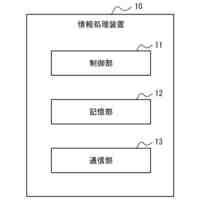
特許文献1にはこの種の軌道生成装置の一例が記載されている。その構成を簡単に説明すると、その装置は、ロボットが現在位置から目標位置まで走行する軌道、あるいは物を掴むアームの軌道を生成する装置であって、ロボットに搭載され、あるいはロボットの外部に設置されている制御装置を備えている。制御装置は、コンピュータを主体とした装置であって、機能的構成として、演算部と、評価部と、チェック部と、最適化部とを有している。
【0003】
演算部は、現在の状態(例えば現在位置)から目標とする状態(例えば目標位置)に到る動作の経路(軌道)の候補を複数生成する。評価部は、生成されている軌道候補について、予め定めた項目に基づいて評価を行う。評価項目は、必要に応じて適宜に設定し、例えば距離の長短や動作の限界などの拘束条件の充足などである。チェック部は、干渉回避の成立性のチェック(検証)を行う機能的構成であり、予め用意してある三次元(3D)もしくは二次元(2D)のデータに基づいて軌道候補のそれぞれについて検証を行い、検証の済んだ複数の軌道候補を評価の高い順に並べる。最適化部は、動作時間の最適化を行う機能的構成であり、検証が済んで評価の最も高い軌道に沿って、ロボットの各部を最適な時間(最短の時間)で動作させる制御を行う。
【0004】
上記の軌道候補の演算ならびに評価、チェック、時間最適化を短時間で繰り返し実行することによって、現在の動作で経由する経由点に続く、その前方の軌道を求め、こうして求めた短い区間(経由点間)の軌道を繋いで、最終的な目標状態(目標位置)までの軌道を求め、ロボットがその軌道に即して制御されて(動作して)、目標状態(目標位置)に達する。
【先行技術文献】
【特許文献】
【0005】
特開2020-093364号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上述した特許文献1に記載の装置は、複数の軌道候補を演算した後、それらの複数の軌道候補について評価を行っている。その評価項目はソフト上の条件や軌道の長短などであるが、時間最適化をチェック(検証)の後に行うこととしているので、評価は、時々刻々変化するロボットの動作については行われない。そのため、例えばロボットの動作時間の短い軌道を抽出するなどの評価を行うことができない。同様に、チェック部で検証の対象となる軌道候補は、ロボットの動作のデータ(もしくは時間的要因)を含まない軌道候補であるから、すなわち正確な動作が判っていないため、正確な検証とはならない可能性がある。あるいは、検証の対象には、時間に応じた動作が含まれていないので、ロボットの動作環境中の他の移動体との衝突の検証などを行うことができない可能性がある。
【0007】
さらに、特許文献1に記載されているような従来の技術では、軌道候補についての時間最適化をチェック(検証)の後の最終段階で行っているから、その時間最適化の対象は、チェック部を通過した軌道候補のうちの評価が最上の1つの軌道候補に限られることになり、時間最適化の成功の確率が低くなる可能性がある。そして、上記の時間最適化で対象とする軌道候補は、細かい経由点を設定して成立性(干渉回避の成立性)の検証を受けたものであって、細かい経由点(経由状態)を経ることの制約を受けたものとなるために、時間最適化の成功率が低下し、あるいは計算時間が長くなってしまうなどの可能性がある。
【0008】
本発明は上記の技術的課題に着目してなされたものであって、軌道の時間最適化の効率化を図り、また軌道の成立性の検証を正確に行うことのできる軌道生成装置を提供することを目的とするものである。
【課題を解決するための手段】
【0009】
本発明は、上記の目的を達成するために、駆動機構によって所定の動作を行う移動体の目標とする動作状態に到るまでの軌道を生成する軌道生成装置であって、前記目標とする動作状態に到るまでの経由状態が互いに異なる複数の軌道候補を演算して求める軌道候補演算部と、複数の前記軌道候補のそれぞれについて、前記駆動機構によって動作させることのできる最短の動作時間を求める最適化を行う時間最適化部と、前記最適化されている複数の前記軌道候補のそれぞれについて、予め定めた評価項目で評価する評価部と、前記評価された複数の前記軌道候補について、前記目標とする動作状態に到る過程における障害物の回避の成立性を検証する検証部とを有し、前記障害物の回避の成立が前記検証部によって検証された複数の前記軌道候補のうち、前記評価部による評価が最も高い軌道候補を、前記目標とする動作状態に到るまでの軌道とするように構成されていることを特徴とするものである。
【0010】
本発明では、前記評価部は、前記時間最適化がなされている複数の前記軌道候補を、最適化されている前記動作時間で順序づけするように構成されていてよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
トヨタ自動車株式会社
車両
1日前
トヨタ自動車株式会社
方法
今日
トヨタ自動車株式会社
エンジン
今日
トヨタ自動車株式会社
車載装置
1日前
トヨタ自動車株式会社
蓄電装置
2日前
トヨタ自動車株式会社
接合構造
今日
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
制御装置
今日
トヨタ自動車株式会社
蓄電装置
1日前
トヨタ自動車株式会社
冷凍回路
今日
トヨタ自動車株式会社
駆動装置
今日
トヨタ自動車株式会社
受電装置
今日
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
正極活物質
今日
トヨタ自動車株式会社
電池パック
1日前
トヨタ自動車株式会社
予測モデル
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
電気自動車
2日前
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
車両制御装置
1日前
トヨタ自動車株式会社
車両締結構造
6日前
トヨタ自動車株式会社
情報処理装置
1日前
トヨタ自動車株式会社
車両下部構造
6日前
トヨタ自動車株式会社
車両側部構造
6日前
トヨタ自動車株式会社
本人認証方法
1日前
トヨタ自動車株式会社
動力伝達装置
今日
トヨタ自動車株式会社
車両前部構造
1日前
トヨタ自動車株式会社
情報処理装置
今日
トヨタ自動車株式会社
車両下部構造
6日前
トヨタ自動車株式会社
回転トランス
2日前
トヨタ自動車株式会社
充電制御装置
2日前
トヨタ自動車株式会社
ダッシュパネル
2日前
トヨタ自動車株式会社
車両用駆動装置
今日
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ