TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025133169
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024030947
出願日
2024-03-01
発明の名称
移載装置
出願人
株式会社三協システム
代理人
個人
主分類
B25J
15/04 20060101AFI20250904BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアーム先端に装着される吸着ボックスを自動で正確に交換することのできる移載装置を提供する。
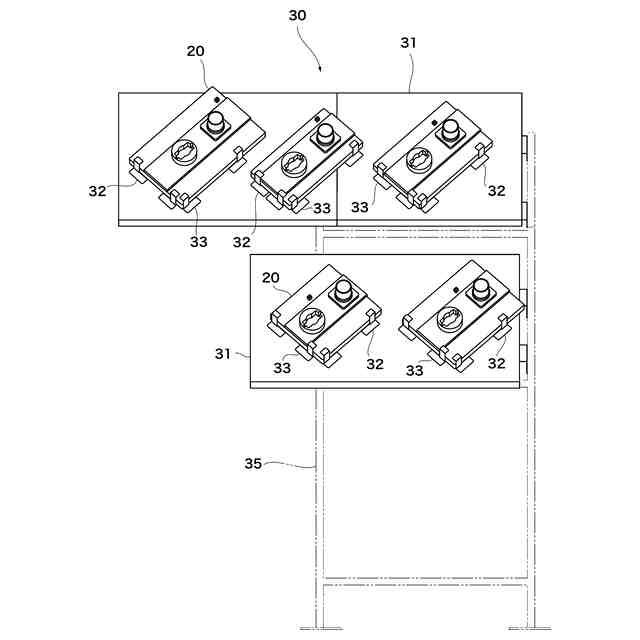
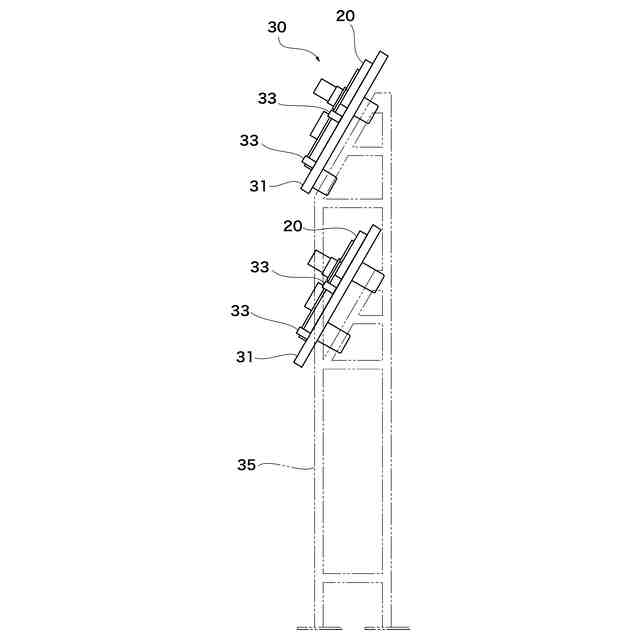
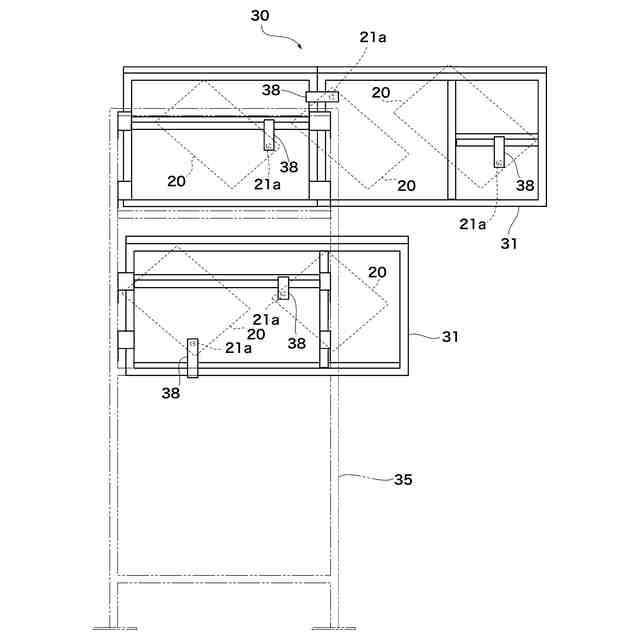
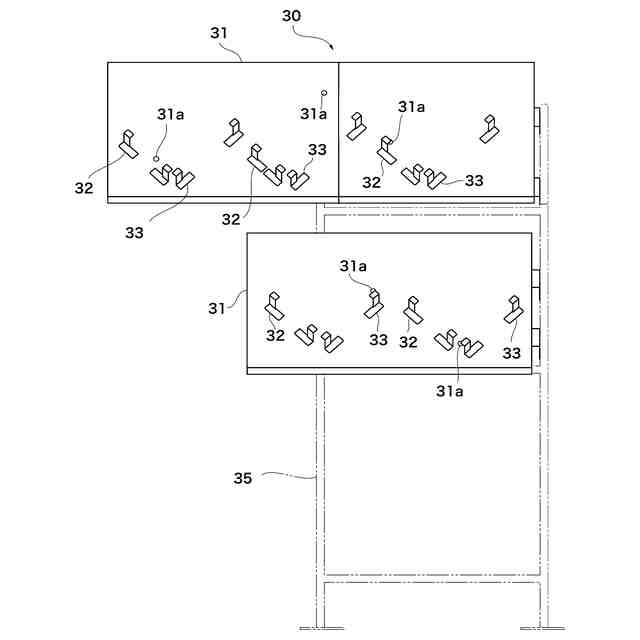
【解決手段】物品3を吸着して移動させるための移載装置10は、物品3を吸着して保持する複数の吸着ボックス20と、吸着ボックス20を着脱自在に装着するためのボックス接続部16を先端に有するロボットアーム15と、使用していない吸着ボックス20を収納するボックス収納部30であって、傾斜して設置された傾斜収納パネル31と、傾斜収納パネル31のパネル表面から表側に突出する突出部を有し、パネル表面上で自重により落下しようとする吸着ボックス20を突出部により支持して収納場所に位置させるボックス支持部材32と、を有するボックス収納部30と、を備え、ロボットアーム15の先端に装着された吸着ボックス20を自動で交換する。
【選択図】図1
特許請求の範囲
【請求項1】
物品を吸着して移動させるための移載装置において、
前記物品を吸着して保持する複数の吸着ボックスと、
前記吸着ボックスを着脱自在に装着するためのボックス接続部を先端に有するロボットアームと、
使用していない前記吸着ボックスを収納するボックス収納部であって、
傾斜して設置された傾斜収納パネルと、
前記傾斜収納パネルのパネル表面から表側に突出する突出部を有し、前記パネル表面上で自重により落下しようとする前記吸着ボックスを前記突出部により支持して収納場所に位置させるボックス支持部材と、
を有するボックス収納部と、
を備え、前記ロボットアームの先端に装着された前記吸着ボックスを自動で交換することを特徴とする移載装置。
続きを表示(約 570 文字)
【請求項2】
前記ボックス支持部材は、前記パネル表面上で下方に向けて凸の角で直交する左右の直交二辺上に前記突出部が位置し、前記吸着ボックスの左右両側から接触することで支持するV字状であることを特徴とする請求項1記載の移載装置。
【請求項3】
前記傾斜収納パネルは、上下に複数段設置されていることを特徴とする請求項1記載の移載装置。
【請求項4】
複数の前記吸着ボックスは、それぞれ形状が異なり、前記ボックス収納部の収納場所は、前記吸着ボックス毎に固定されていることを特徴とする請求項1記載の移載装置。
【請求項5】
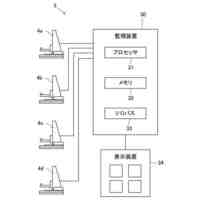
前記ボックス収納部に設置された収納部用投受光器と、前記吸着ボックスに設置された収納部用反射板とを有し、前記収納場所に収納された前記吸着ボックスが正規のものであるか否かを確認する収納部ボックス検出器をさらに備えることを特徴とする請求項4記載の移載装置。
【請求項6】
前記移載装置のフレームに設置されたアーム先端用投受光器と、前記吸着ボックスに設置されたアーム先端用反射板とを有し、前記多関節ロボットアームの先端に装着された前記吸着ボックスが所望のものであるか否かを確認するアーム先端ボックス検出器をさらに備えることを特徴とする請求項1記載の移載装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、物品を移動させるための移載装置に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、製品(物品)を段ボール箱に箱詰めする移載装置である箱詰め装置(製品投入装置)が提供されており、例えば、下記特許文献1に開示されている。下記特許文献1では、ロボットアームの先端に装着された吸着部材により製品を吸引・吸着してから段ボール箱内に移載し、その後、吸着部材の吸引を解除して製品を解放することで、箱詰めを行っている。
【先行技術文献】
【特許文献】
【0003】
特開2021-50023号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、製品を吸引・吸着するための吸着部材は、吸着する製品及び箱詰めする段ボール箱の形状に合わせた形状となっており、箱詰めする製品や段ボール箱の形状やサイズが変更される場合には、いったん箱詰め装置を停止させ、ロボットアームに装着された吸着部材を変更後の製品や段ボール箱に合わせた形状のものに、作業者が手動で変更する必要がある。
【0005】
しかし、作業者が手動で吸着部材の交換を行う場合には、交換作業の度に作業者を配置して交換作業を行う必要があり、製造効率が低下する。また、人間の作業にはヒューマンエラーがつきものであり、間違ったサイズの吸着部材が装着されてしまうおそれもある。
【0006】
本発明は、このような課題に鑑みてなされたものであり、ロボットアーム先端に装着される吸着ボックスを自動で正確に交換することのできる移載装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係る移載装置は、物品を吸着して移動させるための移載装置において、前記物品を吸着して保持する複数の吸着ボックスと、前記吸着ボックスを着脱自在に装着するためのボックス接続部を先端に有するロボットアームと、使用していない前記吸着ボックスを収納するボックス収納部であって、傾斜して設置された傾斜収納パネルと、前記傾斜収納パネルのパネル表面から表側に突出する突出部を有し、前記パネル表面上で自重により落下しようとする前記吸着ボックスを前記突出部により支持して収納場所に位置させるボックス支持部材と、を有するボックス収納部と、を備え、前記ロボットアームの先端に装着された前記吸着ボックスを自動で交換することを特徴とする。
【発明の効果】
【0008】
本発明に係る移載装置によれば、ロボットアーム先端に装着される吸着ボックスを自動で正確に交換することができる。
【図面の簡単な説明】
【0009】
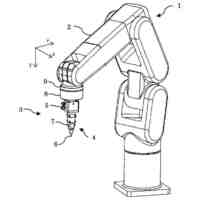
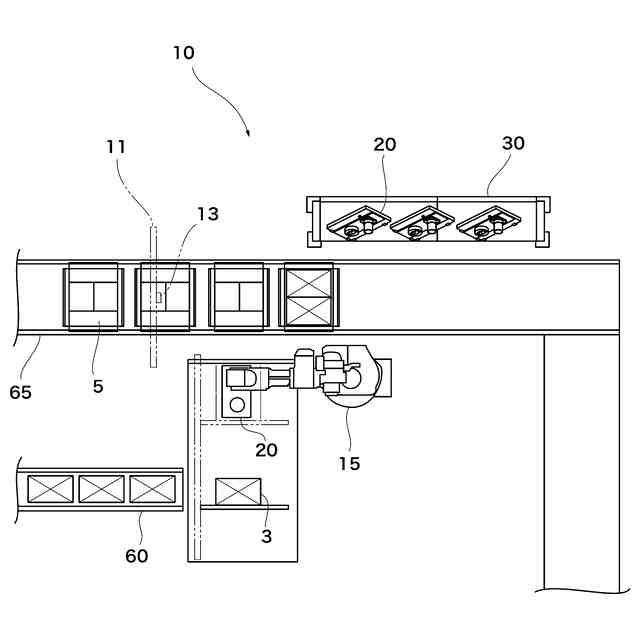
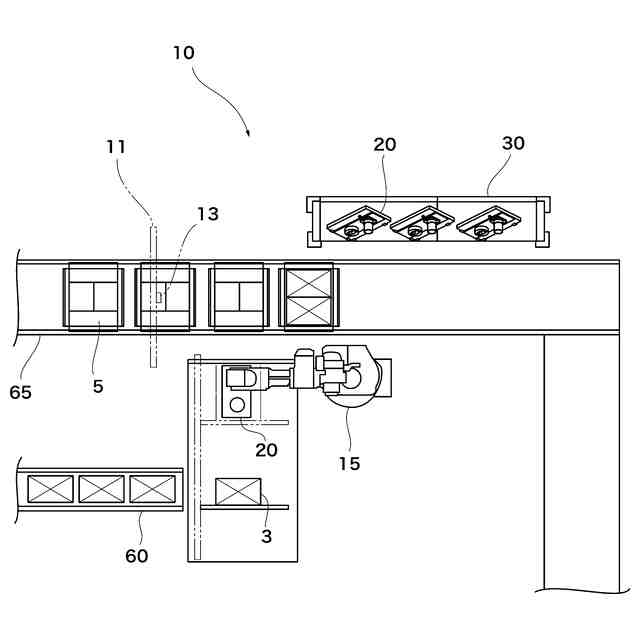
図1は、本発明の実施形態に係る製品投入装置の構成を示す図である。
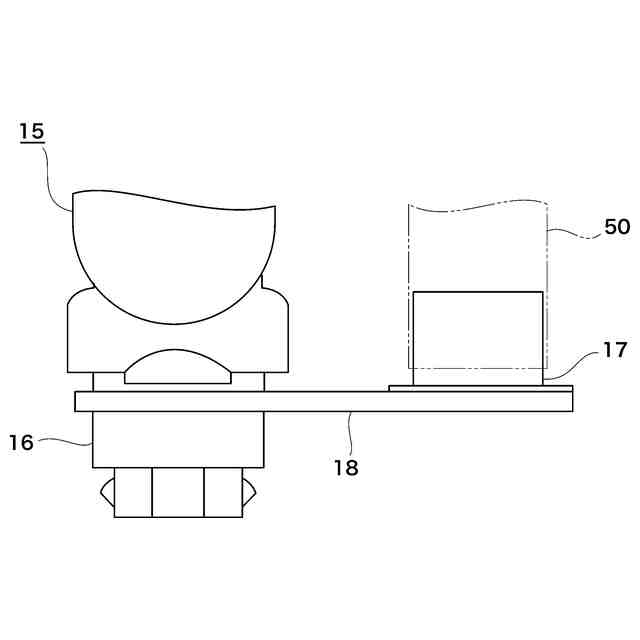
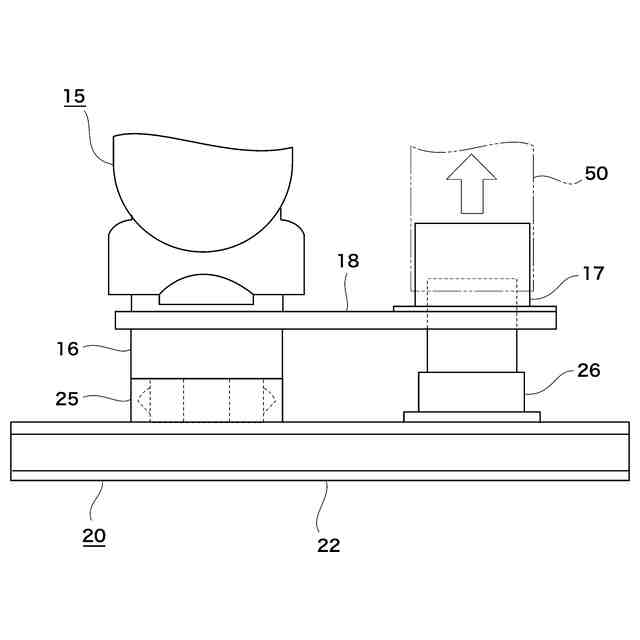
図2は、本発明の実施形態に係る多関節ロボットアームの先端拡大正面図である。
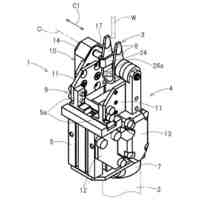
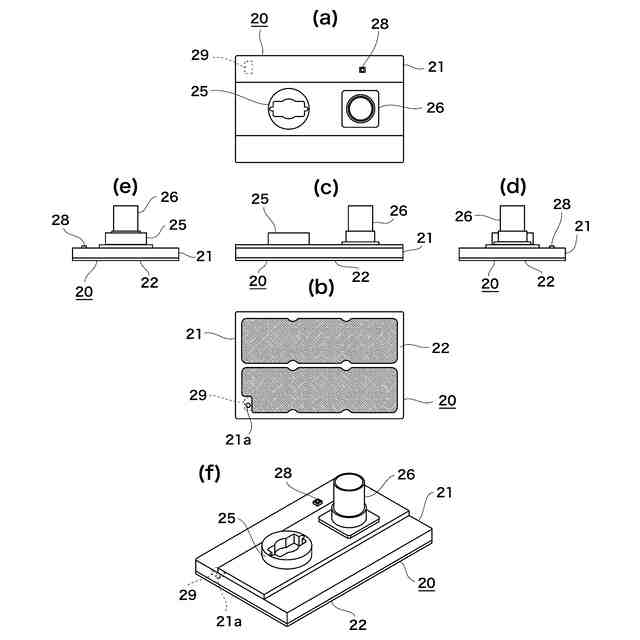
図3は、本発明の実施形態に係る吸着ボックスの構成を示す図である。
図4は、本発明の実施形態に係る多関節ロボットアームの先端に吸着ボックスを装着した状態の拡大正面図である。
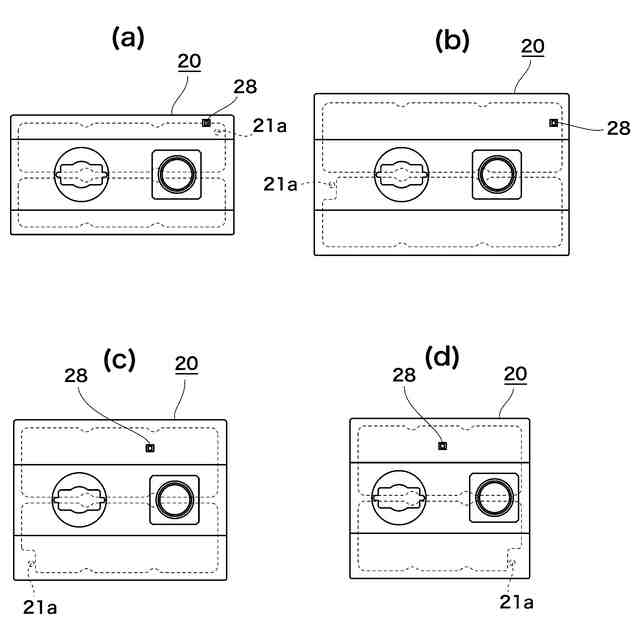
図5は、本発明の実施形態に係る複数の吸着ボックスの構成を示す図である。
図6は、本発明の実施形態に係るボックス収納部の構成を示す正面図である。
図7は、本発明の実施形態に係るボックス収納部の構成を示す側面図である。
図8は、本発明の実施形態に係るボックス収納部の構成を示す背面図である。
図9は、本発明の実施形態に係るボックス収納部の構成を示す正面図である。
【発明を実施するための形態】
【0010】
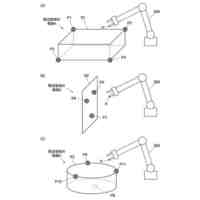
以下、図面を参照しながら、本実施形態に係る移載装置である製品投入装置10について説明する。本実施形態では、製品投入装置10が、製品を吸着するための吸着ボックス20を自動で交換することで、形状の異なる製品(物品)3や形状の異なる段ボール箱5への箱詰めを自動で順次行うことができることを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
20日前
CKD株式会社
把持装置
5日前
川崎重工業株式会社
ハンド
2か月前
ダイセイ株式会社
ロボット自動刻印装置
5日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
2か月前
瓜生製作株式会社
電動締付工具
13日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
2か月前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社不二越
垂直多関節ロボット
20日前
株式会社マキタ
集塵アタッチメント
12日前
トヨタ自動車株式会社
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
住友重機械工業株式会社
ロボット教示装置
今日
株式会社マキタ
電動工具
20日前
NTN株式会社
把持装置
5日前
学校法人立命館
ロボットハンド制御システム
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
株式会社マキタ
作業機
1か月前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
株式会社マキタ
電動作業機
今日
国立大学法人東京科学大学
多自由度入力装置用制御装置
12日前
川崎重工業株式会社
監視システム
2か月前
株式会社人機一体
有脚ロボット
1か月前
ファナック株式会社
経路データセット生成
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
積水ハウス株式会社
固定ピン保持用アタッチメント
1か月前
ダイハツ工業株式会社
ロボット制御システム
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ