TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025158333
公報種別
公開特許公報(A)
公開日
2025-10-17
出願番号
2024060767
出願日
2024-04-04
発明の名称
モバイルマニピュレータ
出願人
トヨタ自動車株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20251009BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】衝突もしくは接触の方向に応じて、慣性力もしくは慣性トルクが小さくなる姿勢を採ることにより、衝突もしくは接触する相手部材との間に生じる力を低減するように構成したモバイルマニピュレータを提供する。
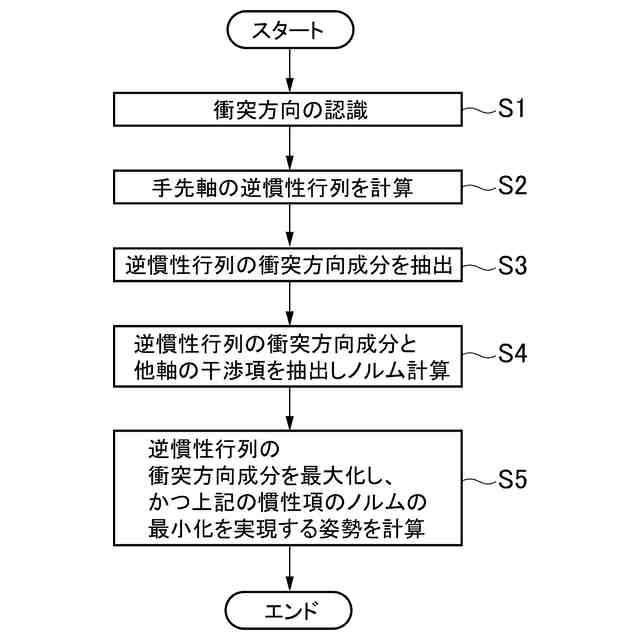
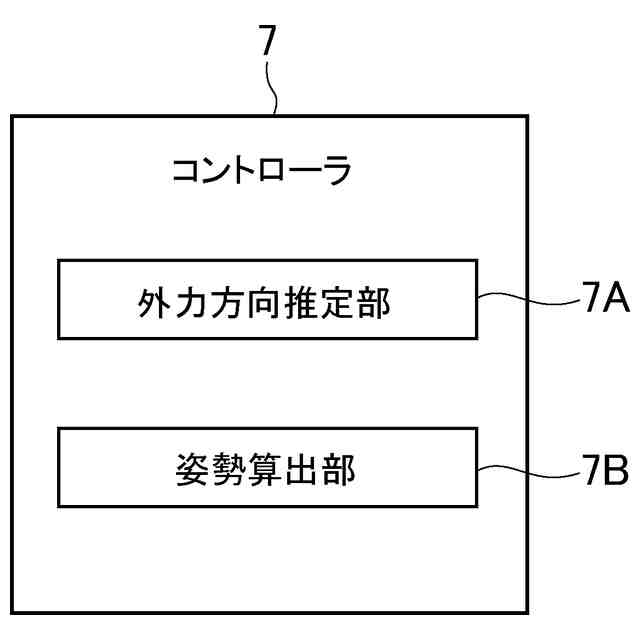
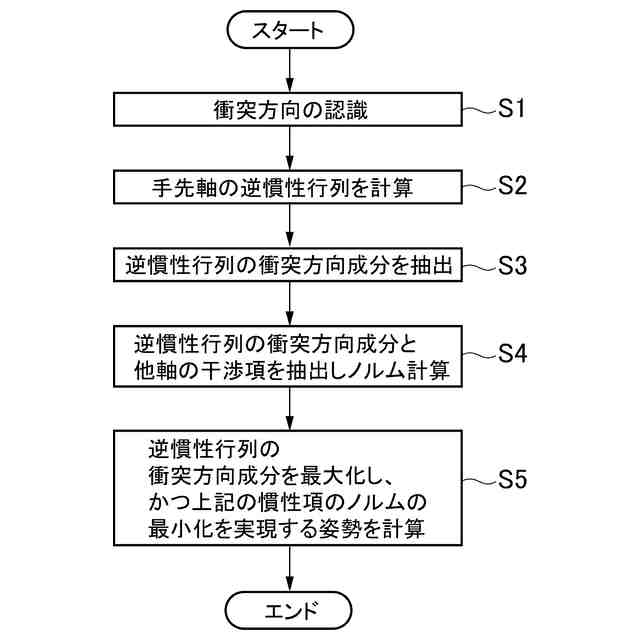
【解決手段】所定の操作を行う手先部を有するとともに複数の関節部によって姿勢を変化させるマニピュレータが、歩行もしくは走行する台車部に取り付けられたモバイルマニピュレータであって、手先部を移動させる過程における、手先部に外力が作用する方向を推定する外力方向推定部(ステップS1)と、外力方向推定部によって推定された方向から外力が作用して姿勢が変化した場合の、手先部から見た慣性モーメントを最小化する姿勢を算出する姿勢算出部(ステップS2~S5)とを備えている。
【選択図】図3
特許請求の範囲
【請求項1】
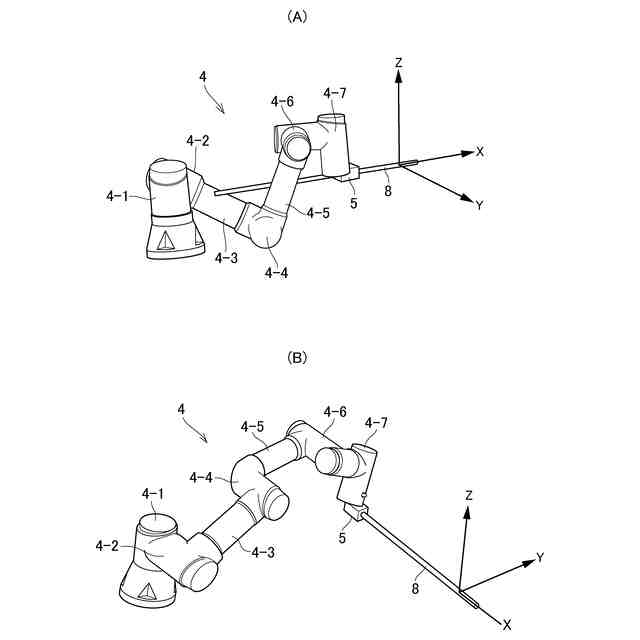
所定の操作を行う手先部を有するとともに複数の関節部によって姿勢を変化させるマニピュレータが、歩行もしくは走行する台車部に取り付けられたモバイルマニピュレータであって、
前記手先部を移動させる過程における、前記手先部に外力が作用する方向を推定する外力方向推定部と、
前記外力方向推定部によって推定された方向から外力が作用して前記姿勢が変化した場合の、前記手先部から見た慣性モーメントを最小化する前記姿勢を算出する姿勢算出部とを備えている
ことを特徴とするモバイルマニピュレータ。
続きを表示(約 480 文字)
【請求項2】
請求項1に記載のモバイルマニピュレータであって、
前記手先部は、手先軸を有する関節部によって保持され、
前記姿勢算出部は、
前記手先軸の前記手先部から見た逆慣性行列を演算し、
前記逆慣性行列の前記外力が作用する方向の成分を抽出し、
前記逆慣性行列の前記外力が作用する方向の成分と前記手先軸以外の関節部における回転軸との干渉項を抽出してノルムを計算し、
前記逆慣性行列の前記外力が作用する方向の成分を最大化するとともに前記ノルムを最小化する姿勢を計算する
ように構成されている
ことを特徴とするモバイルマニピュレータ。
【請求項3】
請求項1または2に記載のモバイルマニピュレータであって、
前記台車部の移動方向での前方と前記手先部を延ばす方向との少なくともいずれか一方を撮像するカメラを有し、
前記外力方向推定部は、前記カメラで得られた画像に基づいて前記外力が作用する方向を推定する
ことを特徴とするモバイルマニピュレータ。
発明の詳細な説明
【技術分野】
【0001】
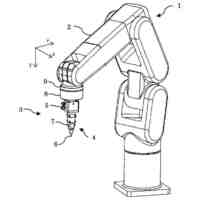
本発明は、台車などの走行体に搭載されたマニピュレータや移動ロボットに設けられたマニピュレータなどの移動性のあるマニピュレータに関し、特に移動時の姿勢を適宜に変化させることのできるマニピュレータに関するものである。
続きを表示(約 2,700 文字)
【背景技術】
【0002】
モバイルマニピュレータは、人間に代わって種々の作業を行うことを想定して構成されるのが一般的である。その作業の一例は、マニピュレータを延ばして対象物を掴んで持ち上げ、その状態で目標位置に走行した後、対象物を所定の箇所に下ろして把持を解除し、さらにはマニピュレータを折り畳むなどの一連の動作である。また、作業の他の例は、目標位置に接近して停止した状態でマニピュレータを延ばして、ハンドルなどを把持するとともにハンドルを回転させ、さらにハンドルを押し、もしくは引くためにマニピュレータを伸縮させ、その後、ハンドルの把持を解除する一連の動作である。その把持を行ういわゆる手に相当する部分は、対象物やハンドル、あるいはそれらが置かれもしくは取り付けられる部材(以下、環境部材と記すことがある。)に接触または衝突してしまうことがある。また、目標位置に移動している過程でマニピュレータが人間などの他の移動体あるいは環境部材に接触してしまう可能性がある。
【0003】
マニピュレータが対象物や環境部材に衝突もしくは接触した場合に相手の部材に作用する力は、慣性力に応じて大きくなる。慣性力の影響を低減もしくは抑制するように構成した移動ロボットの一例が特許文献1に記載されている。その移動ロボットは、ロボット本体に取り付けられている多関節アームを有しており、その多関節アームの伸縮の状態や伸縮の方向などによって移動ロボットの全体としての重心が変化することを利用し、走行に伴う加減速度によって生じる重心周りのモーメントを、重心の位置を変化させることにより減殺するように構成されている。具体的には、走行した場合の加減速量により生じる慣性力をあらかじめ算出し、算出された重心の位置と、算出された慣性力とに基づいて算出される重心周りのモーメントに対し、重心の移動によって重心周りのモーメントを相殺する重心位置を算出し、ロボット本体の重心が、算出された重心周りのモーメントを相殺する重心位置と一致するように、多関節アームを動作させる制御量を算出し、その制御量に基づいて多関節アームの動作を制御している。
【先行技術文献】
【特許文献】
【0004】
特開2022-36688号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載されている移動ロボットで考慮されている慣性力は、移動ロボットが走行した場合の加減速量に基づく慣性力である。しかもその慣性力は、移動ロボットが走行を開始する場合や停止する場合の加減速量に基づく慣性力であって、走行状態に応じて予め定めてある量である。すなわち、特許文献1の発明における慣性力は、走行状態に基づくものに限られ、そのため特許文献1に記載の発明では、環境部材などとの衝突あるいは接触のように、偶発的もしくは突発的な慣性力が生じる事態には対応できない。また、特許文献1に記載された移動ロボットは、本体の重心で慣性力を受けるように構成されているから、その慣性力が環境部材との衝突もしくは接触によって生じる場合には、移動ロボットの全慣性質量に応じた慣性力が、その衝突もしくは接触する相手部材に対して作用してしまう。すなわち、相手部材を損傷させる要因となる慣性力を増大させてしまう可能性がある。
【0006】
本発明は上記の技術的課題に着目してなされたものであって、衝突もしくは接触の方向に応じて、慣性力もしくは慣性トルクが小さくなる姿勢を採ることにより、衝突もしくは接触する相手部材との間に生じる力を低減するように構成したモバイルマニピュレータを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
本発明は、上記の目的を達成するために、所定の操作を行う手先部を有するとともに複数の関節部によって姿勢を変化させるマニピュレータが、歩行もしくは走行する台車部に取り付けられたモバイルマニピュレータであって、前記手先部を移動させる過程における、前記手先部に外力が作用する方向を推定する外力方向推定部と、前記外力方向推定部によって推定された方向から外力が作用して前記姿勢が変化した場合の、前記手先部から見た慣性モーメントを最小化する前記姿勢を算出する姿勢算出部とを備えていることを特徴とするものである。
【0008】
本発明においては、前記手先部は、手先軸を有する関節部によって保持され、前記姿勢算出部は、前記手先軸の逆慣性行列を演算し、前記逆慣性行列の前記外力が作用する方向の成分を抽出し、前記逆慣性行列の前記外力が作用する方向の成分と前記手先軸以外の関節部における回転軸との干渉項を抽出してノルムを計算し、前記逆慣性行列の前記外力が作用する方向の成分を最大化するとともに前記ノルムを最小化する姿勢を計算するように構成されていてよい。
【0009】
本発明においては、前記台車部の移動方向での前方と前記手先部を延ばす方向との少なくともいずれか一方を撮像するカメラを有し、前記外力方向推定部は、前記カメラで得られた画像に基づいて前記外力が作用する方向を推定してよい。
【発明の効果】
【0010】
本発明によれば、台車部で移動し、あるいは関節部で回転させて姿勢を変化させるなどのことによって手先部を移動させる場合に、外力が作用する方向を推定し、その方向から外力が作用したとした場合の、手先部から見た慣性モーメントを最小化するように姿勢を設定する。したがって、当該方向から外力が作用した場合、外力を作用させる相手部材に対する慣性力を小さくすることができる。すなわち、相手部材との接触や衝突などによる損傷を未然に回避もしくは軽減できるから、いわゆる安全性の高いモバイルマニピュレータとすることができ、さらには手先部の移動を、安全性を損なわない範囲で高速化でき、モバイルマニピュレータを使用した作業の効率化を図ることが可能になる。また、本発明によれば、接触あるいは衝突などによる外力の作用方向を予め推定し、その方向での慣性モーメントの最小化を行うので、いわゆる安全な姿勢の演算を簡素化あるいは高速化することができ、それに伴い実用性の高いモバイルマニピュレータとすることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
トヨタ自動車株式会社
学習装置
17日前
CKD株式会社
把持装置
2日前
川崎重工業株式会社
ハンド
1か月前
ダイセイ株式会社
ロボット自動刻印装置
2日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
瓜生製作株式会社
電動締付工具
10日前
トヨタ自動車株式会社
ロボット
2か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社安川電機
ロボット
1か月前
株式会社不二越
垂直多関節ロボット
17日前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社マキタ
集塵アタッチメント
9日前
株式会社三共コーポレーション
工具保持具
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
株式会社マキタ
回転打撃工具
2か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
山九株式会社
レンチ保持治具
2か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
株式会社マキタ
作業機
1か月前
NTN株式会社
把持装置
2日前
株式会社マキタ
電動工具
17日前
学校法人立命館
ロボットハンド制御システム
1か月前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
東レエンジニアリング株式会社
ツール動作機構
2か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
川崎重工業株式会社
監視システム
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
株式会社人機一体
有脚ロボット
1か月前
国立大学法人東京科学大学
多自由度入力装置用制御装置
9日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ