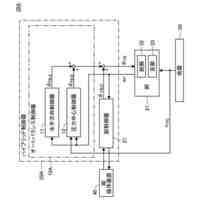
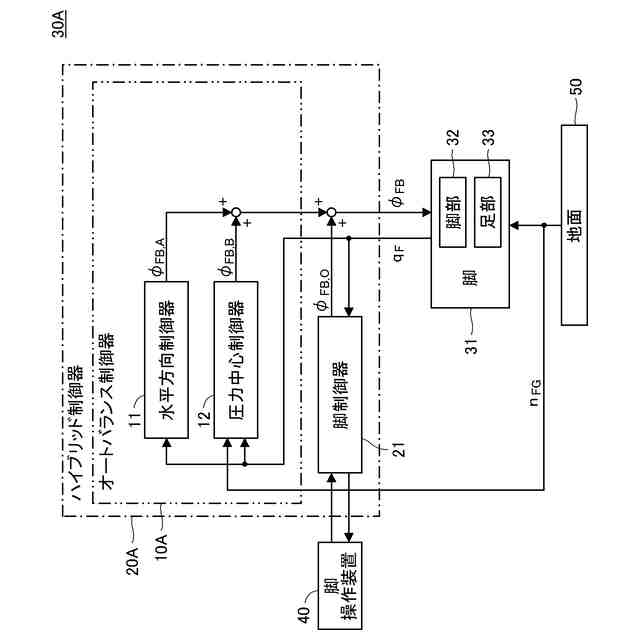
発明の詳細な説明【技術分野】 【0001】 本発明は、有脚ロボットに関し、特に、操作者の指令に基づいて脚を制御する脚制御器とバランス維持を自動で行うためのオートバランス制御器とを含むハイブリッド制御器を備えた有脚ロボットに関する。 続きを表示(約 3,000 文字)【背景技術】 【0002】 危険な環境下で人に代わって各種作業を行う有脚ロボットの実現が望まれているが、完全自律化には未だ多くの課題がある。このため、遠隔操作型の有脚ロボットの開発が進められている。遠隔操作型の有脚ロボットを操作する手法としては、例えば、非特許文献1に記載されたグラフィカルユーザインターフェース(GUI)を介して操作者が歩行経路を指令する手法や、非特許文献2に記載されたモーションキャプチャによって撮影された操作者の動きをロボットに反映させる手法等が知られている。 【0003】 有脚ロボットは一般に、多くの自由度を有する不安定な機構であり、基本動作の1つである歩行は転倒のリスクが高い。この課題に対しては、例えば、非特許文献3,4に記載された実時間で歩行パターンを自動的・自律的に生成する手法が有効である。しかしながら、この手法では、歩行のための脚の動きを逐一操作者が操作できるようになっていない。このため、この手法が適用された有脚ロボットは、建設現場や災害現場のような不整地を歩行する際に必要となる、操作者の判断による足の踏み替えを行うことができない可能性がある。 【0004】 このように、遠隔操作型の有脚ロボットは、操作者の意図通りに脚を動かし、かつロボット全体のバランス維持を自動で行うように脚を動かす制御器を備えていることが望ましい。このような有脚ロボットとして、例えば、特許文献1に記載されたものが知られている。この有脚ロボットは、トルク指令ベースのオートバランス制御器(すなわち、足関節にトルク指令を出力するオートバランス制御器)を備えている。そして、このオートバランス制御器は、操作者の指令に対応したトルク指令を出力する任意の脚制御器と組み合わせて使用することができるように構成されている。このオートバランス制御器によれば、脚制御器の出力がオートバランス制御器に干渉すること、すなわち、オートバランス制御器によるバランスを崩さない範囲で、操作者が脚を意図通りに動かすことができる。 【先行技術文献】 【非特許文献】 【0005】 S. Nakaoka, M. Morisawa, K. Kaneko, S. Kajita, and F. Kanehiro:“Development of an indirect-type teleoperation interface for biped humanoid robots,” Proceedings of 2014 IEEE/SICE International Symposium on System Integration, pp.590-596, 2014. I. Almetwally and M. Mallem:“Real-time tele-operation and tele-walking of humanoid robot NAO using Kinect Depth Camera,” Proceedings of 2013 10th IEEE International Conference on Networking, Sensing and Control, pp.463-466, 2013. J. Ding, M. Yang, J. Zhou, D. Yao, and X. Xiao:“Robust real-time walking pattern generation with dynamical consistency: An analytical method combined with optimal solution,”Proceedings of 2017 IEEE International Conference on Robotics and Biomimetics, pp.1806-1811, 2017. T. Sato, S. Sakaino, and K. Ohnishi:“Real-time walking trajectory generation method with three-mass models at constant body height for three-dimensional biped robots,”IEEE Transactions on Industrial Electronics, vol.58, no.2, pp.376-383, 2011. 【特許文献】 【0006】 特許第5268107号公報 【発明の概要】 【発明が解決しようとする課題】 【0007】 しかしながら、特許文献1に記載の有脚ロボットのオートバランス制御器は、ロボットに持続的な外力が加えられた場合を含む様々な状況において、バランスを維持することができない場合があった。 【0008】 本発明は、上記事情に鑑みてなされたものであって、従来よりも確実にバランスが維持された有脚ロボットを提供することを課題とする。 【課題を解決するための手段】 【0009】 上記課題を解決するために、本発明に係る第1の有脚ロボットは、胴体と、胴体に接続された脚と、脚を制御するハイブリッド制御器とを備えたロボットであって、 脚は、地面に接することができる足裏を有する足部と、脚部と、少なくとも1つの関節とを含み、 ハイブリッド制御器は、自動的なバランスの維持に関する第1トルク指令を出力するオートバランス制御器と、任意の制御に基づく第2トルク指令を出力する脚制御器とを含み、第1トルク指令および第2トルク指令が示すトルク量の合計を示すトルク指令を関節のアクチュエータが発生すべきトルクに関する指令として出力するように構成され、 オートバランス制御器は、第3トルク指令を出力する水平方向制御器と、第4トルク指令を出力する圧力中心制御器とを含み、第3トルク指令および第4トルク指令が示すトルク量の合計を示すトルク指令を第1トルク指令として出力するように構成され、 第3トルク指令は、胴体が足裏の略鉛直上方にあるようにするために関節のアクチュエータが発生すべきトルクに関する指令であり、第4トルク指令は、足裏が地面から受ける床反力の圧力中心点が足裏内の所定位置にあるようにするために関節のアクチュエータが発生すべきトルクに関する指令であり、第4トルク指令が示すトルク量は、際限なく大きくなることがないように制限されている、との構成を有している。 【0010】 上記第1の有脚ロボットのオートバランス制御器は、第5トルク指令を出力する鉛直方向制御器をさらに含み、第3トルク指令、第4トルク指令および第5トルク指令が示すトルク量の合計を示すトルク指令を第1トルク指令として出力するように構成されていてもよい。第5トルク指令は、胴体の略鉛直方向の位置が所定の中立状態に近づくようにするために関節のアクチュエータが発生すべきトルクに関する指令、または、関節の変位が所定の中立状態に近づくようにするために関節のアクチュエータが発生すべきトルクに関する指令である。 (【0011】以降は省略されています) この特許をJ-PlatPat(特許庁公式サイト)で参照する





 特許ウォッチ
特許ウォッチ