TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177000
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024083458
出願日
2024-05-22
発明の名称
把持装置
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20251128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来構造よりも軽量化、コンパクト化を図ることができる把持装置を提供する。
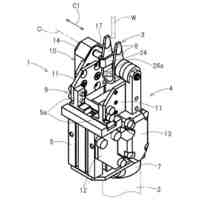
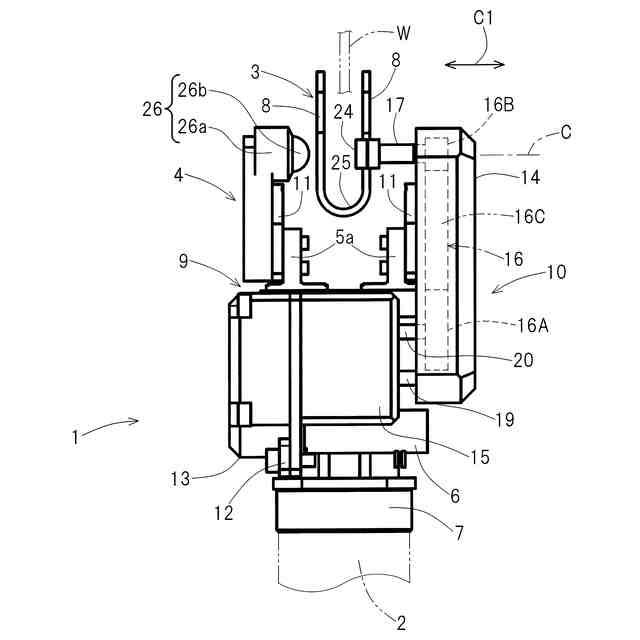
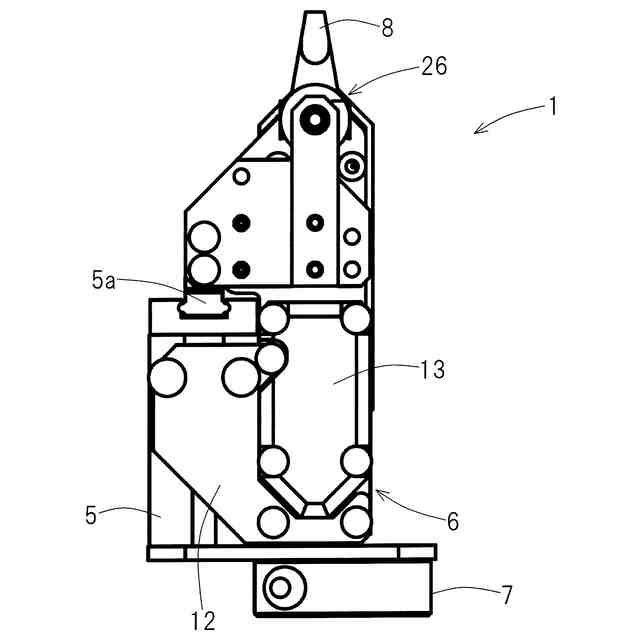
【解決手段】把持装置1は、把持爪ユニット3と、把持爪ユニット3を開閉方向C1に動作可能に支持すると共に開閉方向C1に平行な回転軸心C回りに回転する把持機構4と、把持爪ユニット3を開閉駆動する開閉用駆動源5と、把持爪ユニット3を回転軸心C回りに回転駆動する回転用駆動源とを備える。把持爪ユニット3は、一対の把持爪8,8と、これら把持爪8,8の一部を連結する把持爪連結機構25とを有する。把持機構4は、一方の把持爪7を支持し且つ把持爪ユニット全体を回転軸心C回りに揺動可能に回転支持する揺動回転軸17と、一対の把持爪8,8を開閉方向C1に移動自在にする直動要素11,11を含む開閉機構9とを含む。開閉用駆動源5により、直動要素11,11と揺動回転軸17とで協働して一対の把持爪8,8を開閉駆動する。
【選択図】図1
特許請求の範囲
【請求項1】
ワークを把持および解放する開閉方向に動作する把持爪ユニットと、
この把持爪ユニットを、前記開閉方向に動作可能に支持すると共に、前記開閉方向に平行な回転軸心回りに回転する把持機構と、
前記把持爪ユニットを開閉駆動する開閉用駆動源と、
前記把持爪ユニットを前記回転軸心回りに回転駆動する回転用駆動源と、を備え、
前記把持爪ユニットは、一対の把持爪と、これら把持爪の一部を連結する把持爪連結機構とを有し、
前記把持機構は、
いずれか一方または両方の把持爪を支持し且つ前記把持爪ユニット全体を前記回転軸心回りに揺動可能に回転支持する揺動回転軸と、
前記一対の把持爪を前記開閉方向に移動自在にする直動要素を含む開閉機構と、を含み、
前記開閉用駆動源により、前記直動要素と前記揺動回転軸とで協働して前記一対の把持爪を開閉駆動する把持装置。
続きを表示(約 1,100 文字)
【請求項2】
請求項1に記載の把持装置において、前記把持機構は、前記把持爪ユニットを前記回転軸心回りに回転支持する回転機構を含み、この回転機構は、前記回転用駆動源の回転を前記揺動回転軸に伝達すると共に、前記揺動回転軸を前記開閉方向に移動可能とする伸縮回転機構を有する把持装置。
【請求項3】
請求項1または請求項2に記載の把持装置において、前記回転用駆動源がモータである把持装置。
【請求項4】
請求項1または請求項2に記載の把持装置において、前記揺動回転軸には、前記把持爪ユニットのいずれか一方の把持爪を着脱自在に支持する把持爪着脱部材が設けられている把持装置。
【請求項5】
請求項4に記載の把持装置において、前記把持爪連結機構は、前記いずれか一方の把持爪が他方の把持爪に対して相対的に弾性変形可能な復元力を備え、
前記直動要素における、他方の把持爪に対向する部分には、この他方の把持爪に当接離隔する押下部材が設けられ、
前記開閉用駆動源により前記直動要素を開閉方向一方に移動させることで、前記復元力に抗して、前記押下部材を前記他方の把持爪に当接させて前記一対の把持爪を閉状態とし、
前記開閉用駆動源により前記直動要素を開閉方向他方に移動させることで、前記一対の把持爪を前記復元力により開状態とする把持装置。
【請求項6】
請求項1または請求項2に記載の把持装置において、前記把持爪ユニットは、他方の把持爪を前記把持機構に回転支持する受動回転軸を有する把持装置。
【請求項7】
請求項2に記載の把持装置において、前記伸縮回転機構は、
前記回転用駆動源の回転が伝達され、且つ、前記回転軸心回りに回転支持された入力軸と、
この入力軸に平行に回転支持された出力軸と、
前記入力軸に設けられた第1の歯車と、
前記出力軸に設けられ前記第1の歯車と噛み合って、前記第1の歯車の回転力が伝達されると共に、前記第1の歯車に対して前記開閉方向に平行な軸方向に移動可能な第2の歯車とを有し、
前記第1および第2の歯車のいずれか一方の歯車は、前記把持機構の開閉幅よりも軸方向寸法が長い把持装置。
【請求項8】
請求項7に記載の把持装置において、前記伸縮回転機構は、前記出力軸を前記軸方向に摺動自在に支持する滑り軸受を有する把持装置。
【請求項9】
請求項7に記載の把持装置において、前記回転機構の伝達要素がプーリとベルトである把持装置。
【請求項10】
請求項7に記載の把持装置において、前記回転機構の伝達要素が平歯車である把持装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、機械部品、電子部品等のワークを把持する把持装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
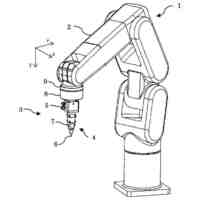
多関節ロボット等の先端に設置されたハンドにおいて、爪を直線方向に開閉することでワークを把持し、爪で把持した状態でワークの姿勢を変更するものがある(例えば、特許文献1,2)。
【0003】
特許文献1のハンドは、把持爪の開閉方向に延びるシャフトに回転可能にナットが設けられ、このナットを介して把持爪に回転を伝達することで、ワークを把持したまま把持爪を揺動させている。特許文献2のハンドは、把持爪の開閉方向に延びるボールねじにナットが螺合され、このナットを介して把持爪に回転を伝達することで、ワークを把持したまま爪を揺動させている。
【先行技術文献】
【特許文献】
【0004】
特許第5617512号公報
特許第6029561号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1および2のハンドでは、ワークを把持する前に把持爪を把持しやすい向きに調整することもできる。この調整は、不規則に積み上げられたワークを把持する用途で有効である。
このとき、ワークを把持するために、一対の把持爪の角度は同期して動く必要がある。従来構造では、1つの駆動源から両方の把持爪に動力を分配する機構を設ける、または独立した機構を同時に駆動させることで、一対の把持爪を同時に動作させている。この場合、ハンドの重量が嵩むうえハンドが大型化する。
【0006】
本発明の目的は、従来構造よりも軽量化、コンパクト化を図ることができる把持装置を提供することである。
【課題を解決するための手段】
【0007】
本発明の把持装置は、ワークを把持および解放する開閉方向に動作する把持爪ユニットと、
この把持爪ユニットを、前記開閉方向に動作可能に支持すると共に、前記開閉方向に平行な回転軸心回りに回転する把持機構と、
前記把持爪ユニットを開閉駆動する開閉用駆動源と、
前記把持爪ユニットを前記回転軸心回りに回転駆動する回転用駆動源と、を備え、
前記把持爪ユニットは、一対の把持爪と、これら把持爪の一部を連結する把持爪連結機構とを有し、
前記把持機構は、
いずれか一方または両方の把持爪を支持し且つ前記把持爪ユニット全体を前記回転軸心回りに揺動可能に回転支持する揺動回転軸と、
前記一対の把持爪を前記開閉方向に移動自在にする直動要素を含む開閉機構と、を含み、
前記開閉用駆動源により、前記直動要素と前記揺動回転軸とで協働して前記一対の把持爪を開閉駆動する。
【0008】
この構成によると、一対の把持爪でワークを把持した状態で把持爪ユニットを揺動回転することができる。よって、この把持装置を連結する作業用機械を動作させることなくワークを揺動回転できる。回転対象が主にワークと把持爪となるため、回転対象の重量および慣性モーメントが小さくなる。その結果、前記作業用機械の高速回転が可能となる。
【0009】
揺動回転軸は一方または両方の把持爪を支持し且つ把持爪ユニット全体を回転支持するうえ、把持爪ユニットは回転用駆動源により回転駆動される。一対の把持爪は、開閉用駆動源により、直動要素と揺動回転軸とで協働して開閉駆動される。このため、前述の従来構造のように1つの駆動源から両方の把持爪に回転動力を分配する機構、独立した機構を同時に回転駆動させる駆動源等を設ける必要がなく、従来構造よりも把持装置全体を簡素な構造にできる。したがって、従来構造よりも把持装置を軽量化およびコンパクト化することができる。
【0010】
前記把持機構は、前記把持爪ユニットを前記回転軸心回りに回転支持する回転機構を含み、この回転機構は、前記回転用駆動源の回転を前記揺動回転軸に伝達すると共に、前記揺動回転軸を前記開閉方向に移動可能とする伸縮回転機構を有してもよい。この場合、把持爪ユニットを、開閉方向に伸縮移動しながらの回転伝達、伸縮移動する前後の2点に停止中の回転伝達、および伸縮移動中の任意の点での回転伝達が全て可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
把持装置
1日前
NTN株式会社
転動部材及び転動部品
8日前
NTN株式会社
転がり軸受及び転がり軸受用転動部品
1日前
NTN株式会社
窒化ケイ素焼結体、機械部品および軸受
8日前
NTN株式会社
スピンドル装置、研削装置、および切削加工装置
3日前
NTN株式会社
ボールねじ装置及びこれを備えた電動アクチュエータ
16日前
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
トヨタ自動車株式会社
学習装置
16日前
株式会社不二越
ロボット
2か月前
株式会社竹中工務店
補助セット
2か月前
CKD株式会社
把持装置
1日前
川崎重工業株式会社
ハンド
1か月前
ダイセイ株式会社
ロボット自動刻印装置
1日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
2か月前
瓜生製作株式会社
電動締付工具
9日前
株式会社不二越
移動ロボットシステム
2か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
8日前
株式会社不二越
垂直多関節ロボット
16日前
トヨタ自動車株式会社
軌道生成装置
2か月前
株式会社三共コーポレーション
工具保持具
1か月前
工機ホールディングス株式会社
作業機
1か月前
アネックスツール株式会社
ドライバービット
2か月前
シンフォニアテクノロジー株式会社
搬送装置
2か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
ワールド技研株式会社
ロボットセル装置
2か月前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
回転打撃工具
2か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ