TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025141062
公報種別
公開特許公報(A)
公開日
2025-09-29
出願番号
2024040804
出願日
2024-03-15
発明の名称
搬送装置
出願人
シンフォニアテクノロジー株式会社
代理人
個人
主分類
B25J
9/10 20060101AFI20250919BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】初期の搬送位置とティーチングで得られる搬送位置の間に位置ずれが生じている場合に、オフライン上で生成した軌道特性を損なうことなく位置ずれに応じて搬送軌道を補正する搬送装置を提供する。
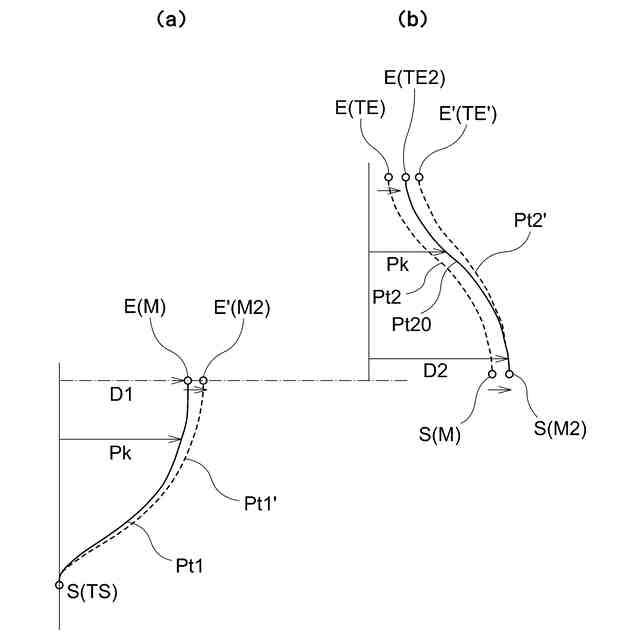
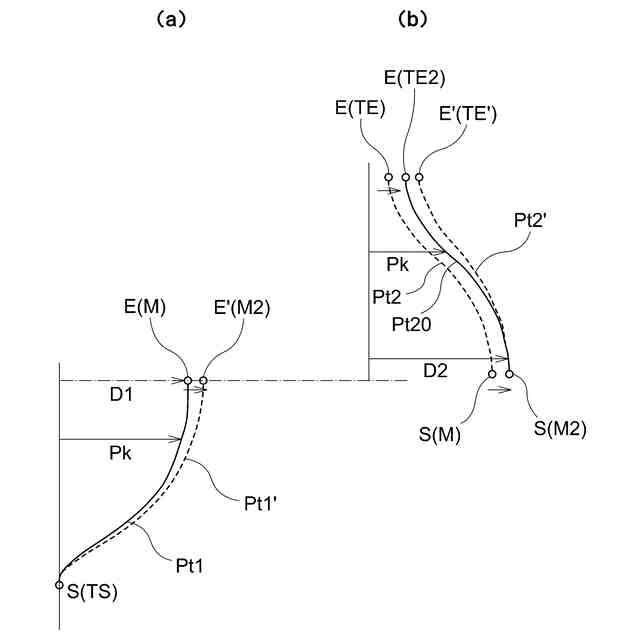
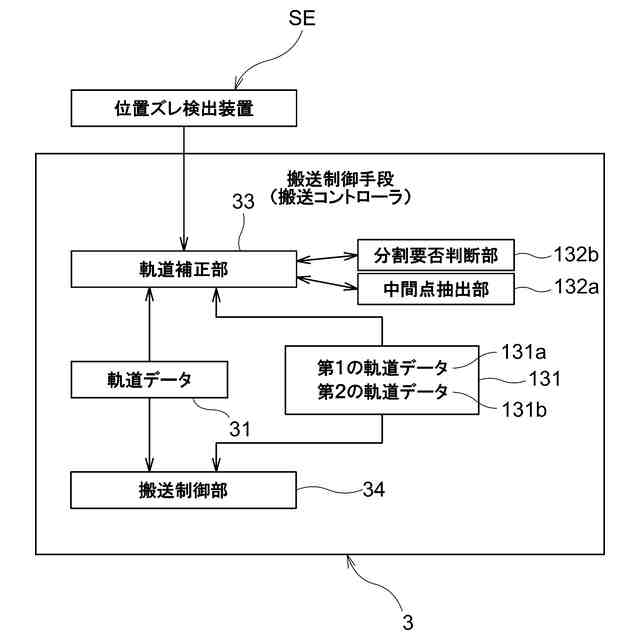
【解決手段】目標となる終点E’が搬送軌道Ptの終点Eから位置ずれしている場合に搬送軌道Ptの終点Eが目標終点E’となるように搬送軌道Ptを補正する軌道補正部を具備し、軌道補正部は、搬送開始位置を始点とし搬送停止位置を終点とする軌道の補正では途中に軌道の逸脱が生じる場合に、搬送開始位置TSと搬送停止位置TEの間に中間点Mを設定し、搬送開始位置TSを始点Sとし中間点Mを終点Eとする第1の軌道Pt1と、中間点Mを始点Sとし搬送停止位置TEを終点Eとする第2の軌道Pt2に分けて、軌道の補正を行う。
【選択図】図7
特許請求の範囲
【請求項1】
搬送開始位置から搬送停止位置まで搬送軌道に沿って搬送対象物を搬送する搬送装置であって、
ある始点からある終点まで予め設定された搬送軌道を用いて搬送制御を行うにあたり、目標となる終点が前記搬送軌道の終点から位置ずれしている場合に搬送軌道の終点が目標終点となるように前記搬送軌道を補正する軌道補正部を具備し、
前記軌道補正部は、補正前の終点と補正後の目標終点とを結ぶ方向をずれ方向とし、補正前軌道上の始点から或る点までの距離のうちずれ方向成分の距離を補正前距離とし、補正後軌道上の点のうち前記或る点を通るずれ方向に沿った軸上に位置する点を対応点として補正後軌道上の始点から前記対応点までの距離のうちずれ方向成分の距離を補正後距離とした場合に、前記或る点が軌道上の所定の点のうちいずれにあっても補正前距離と補正後距離との比率が同一となるように、始点を基準として補正前距離をずれ方向に沿って拡大又は縮小することにより当該軌道を補正するものであり、
前記軌道補正部は、前記搬送開始位置と前記搬送停止位置の間に1又は2以上の中間点を設定し、
搬送開始位置を始点とし中間点を終点とする軌道と、中間点を始点とし搬送停止位置を終点とする軌道に分けて、軌道の補正を行う、ことを特徴とする搬送装置。
続きを表示(約 1,100 文字)
【請求項2】
搬送開始位置から搬送停止位置まで搬送軌道に沿って搬送対象物を搬送する搬送装置であって、
ある始点からある終点まで予め設定された搬送軌道を用いて搬送制御を行うにあたり、目標となる始点が前記搬送軌道の始点から位置ずれしている場合に搬送軌道の始点が目標始点となるように前記搬送軌道を補正する軌道補正部を具備し、
前記軌道補正部は、補正前の始点と補正後の目標始点とを結ぶ方向をずれ方向とし、補正前軌道上の或る点から終点までの距離のうちずれ方向成分の距離を補正前距離とし、補正後軌道上の点のうち前記或る点を通るずれ方向に沿った軸上に位置する点を対応点として補正後軌道上の前記対応点から終点までの距離のうちずれ方向成分の距離を補正後距離とした場合に、前記或る点が軌道上の所定の点のうちいずれにあっても補正前距離と補正後距離との比率が同一となるように、終点を基準として補正前距離をずれ方向に沿って拡大又は縮小することにより当該軌道を補正するものであり、
前記軌道補正部は、前記搬送開始位置と前記搬送停止位置の間に1又は2以上の中間点を設定し、
搬送開始位置を始点とし中間点を終点とする第1の軌道と、中間点を始点とし搬送停止位置を終点とする第2の軌道に分けて、軌道の補正を行う、ことを特徴とする搬送装置。
【請求項3】
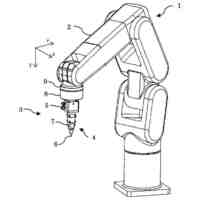
複数のリンクを屈折可能に接続した多関節ロボット式の搬送機構を用いて前記搬送対象物を搬送する搬送装置であって、
前記搬送軌道は、多関節ロボットを構成する各リンクの角度により表されており、
前記軌道補正部は、前記搬送軌道を示す各リンクの角度の少なくとも何れかを補正するにあたり、
リンクの角度変化の方向が通過前後で反転する変曲点がある場合に、当該変曲点を中間点とする、請求項1又は2に記載の搬送装置。
【請求項4】
前記軌道補正部は、前記搬送開始位置と前記搬送停止位置の距離に対して搬送終点位置における位置ずれが予め定めた閾値以上となる場合に、前記中間点を用いた軌道補正を行う、請求項1又は2に記載の搬送装置。
【請求項5】
前記軌道補正部は、第1の軌道を補正する際の終点となる中間位置の位置ずれ量と、第1の軌道補正を踏まえて第2の軌道を補正する際に事前に第2の軌道全体をオフセットするためのオフセット量とを算出するものであり、
前記搬送開始位置から前記搬送停止位置までの搬送時間と、前記搬送開始位置から前記中間点までの搬送時間との比率に、前記搬送停止位置における位置ずれ量を乗じて、前記第1の軌道補正時における中間目標点の位置ずれ量とし、かつ、前記オフセット量とする、請求項1又は2に記載の搬送装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、搬送軌道に沿って搬送対象物を搬送する搬送装置に係り、特に予め設定された搬送軌道と目標位置とのずれを補正する機能を適正化した搬送装置に関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
ウェーハを搬送する水平多関節ロボットは、搬送効率を高めるために予めオフライン上で生成した先端の軌道を用いて動作が行われることが多い。オフライン上で生成される軌道は、周辺装置(真空チャンバー)の寸法等を考慮した軌道であるが、実際には外部からの影響やロボットをチャンバに組付ける際の組付け誤差を微調整する作業(ティーチング)が行われる。
【0003】
この際、オフライン上で生成される停止位置とティーチングで調整された停止位置に位置ずれが生じる。実運用時は、ティーチングで調整した停止位置を基準として搬送動作を行う必要があるため、位置ずれ分を考慮する必要がある。
【0004】
1つの案として、特許文献1では、図12(a)に示すように、オフラインPt上で生成したウェーハWの搬送軌道を変化させずに調節するやり方、すなわち、開始位置Sから一度オフライン上で求めた停止位置Eへ移動し、そこから更に、ティーチングした停止位置E´へ移動する方法がある。しかしながら、これでは搬送効率の低下や振動発生の恐れがある。
【0005】
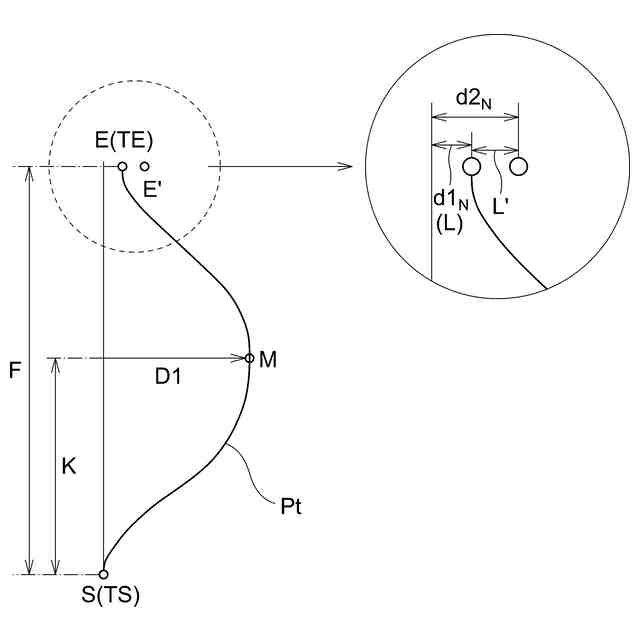
このことを顧みて先行文献2では、搬送効率の低下や搬送軌道の特性を損なうことなく位置ずれを補正する手法を提案している。具体例として、図13(a)に示すオフライン軌道Ptに対して、開始位置Sは同じで、オフライン上で求められた停止位置Eとティーチングで設定された停止位置E’の間に位置ずれが生じた場合を説明する。勿論、図14に示すように、停止位置Eが同じで開始位置Sがずれていても、両方ずれていても同様である。
【0006】
図13(a)、(b)において、開始位置Sから停止位置E及び目標停止位置E’までのそれぞれの距離d1N及びd2N(これについては後述)を求めることができる。軌道上の位置は関節軸の回転角によって表現されるから、オフライン上の搬送開始位置をθ1、オフライン上の搬送停止位置をθN、ティーチング停止位置をθN´とした場合、係数βは、
β=d2N/d1N=(θN´-θ1)/(θN-θ1)
で表すことができる。
【0007】
よって、このd1N及びd2Nの比(補正係数β)を開始位置S(θ1)から停止位置E(θN)の間にある各点Pkにおいて補正するとすれば、
β=d2k/d1k=(θk´-θ1)/(θk-θ1)
θk´=β(θk-θ1)+θ1
となり、この点を連ねた軌道Pt´を補正後の軌道とすることができる。
【0008】
上記のような補正を行うことで、開始位置Sや停止位置Eで別途の移動をする必要がないため搬送効率の低下が起こらない。また、位置補正を行ったことによる動作中の速度・加速度の変化もd1N及びd2Nの比が係数として掛けた値となるが、ティーチングによる位置ずれLは開始位置と停止位置の距離d1Nに対して一般的に微々たるものである。そのため、補正係数は1に近い値となり搬送特性が大きく変化することがない、と特許文献2に記載されている(段落0031、0032)。
【先行技術文献】
【特許文献】
【0009】
特開2003-145461号公報
特開2011-167828号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、実際には搬送開始位置Sと搬送停止位置Eの距離d1Nが微小となる場合がある。そして、移動途中の距離が過大となる可能性が存在し、搬送軌道及び搬送特性を大きく損なう可能性がある。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
CKD株式会社
把持装置
6日前
トヨタ自動車株式会社
学習装置
21日前
ダイセイ株式会社
ロボット自動刻印装置
6日前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
2か月前
瓜生製作株式会社
電動締付工具
14日前
株式会社安川電機
ロボット
1か月前
株式会社マキタ
集塵アタッチメント
13日前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社不二越
垂直多関節ロボット
21日前
株式会社やまびこ
電動作業機
今日
トヨタ自動車株式会社
ロボットハンド
1か月前
新電元工業株式会社
インピーダンス制御装置
今日
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
パナソニック株式会社
工具
今日
住友重機械工業株式会社
ロボット教示装置
1日前
株式会社マキタ
電動工具
21日前
株式会社マキタ
作業機
1か月前
ニデックインスツルメンツ株式会社
産業用ロボット
1か月前
NTN株式会社
把持装置
6日前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
電動作業機
1日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
株式会社人機一体
有脚ロボット
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
1か月前
ファナック株式会社
経路データセット生成
1か月前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
国立大学法人東京科学大学
多自由度入力装置用制御装置
13日前
積水ハウス株式会社
固定ピン保持用アタッチメント
1か月前
ダイハツ工業株式会社
ロボット制御システム
6日前
株式会社マキタ
インパクト工具
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ