TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025177704
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084756
出願日
2024-05-24
発明の名称
ロボット制御システム
出願人
ダイハツ工業株式会社
代理人
個人
,
個人
,
個人
主分類
B25J
19/06 20060101AFI20251128BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者が人協働ロボットと共に作業を行うにあたり、作業者がなるべく人協働ロボットの近くで作業可能とする。
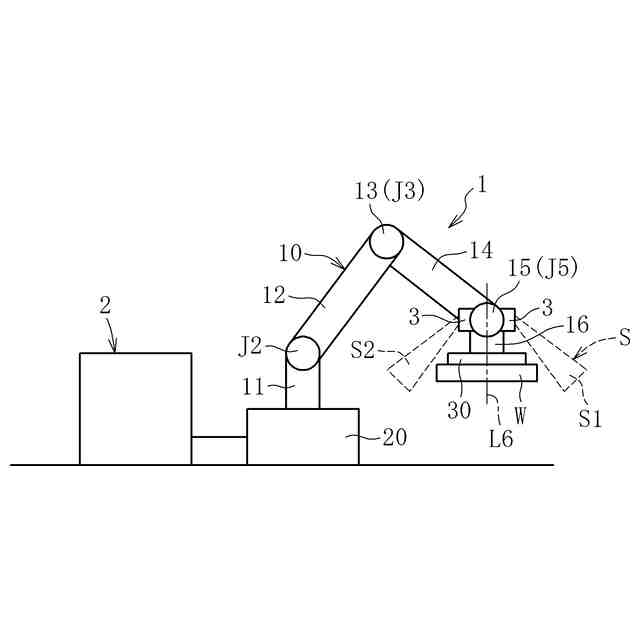
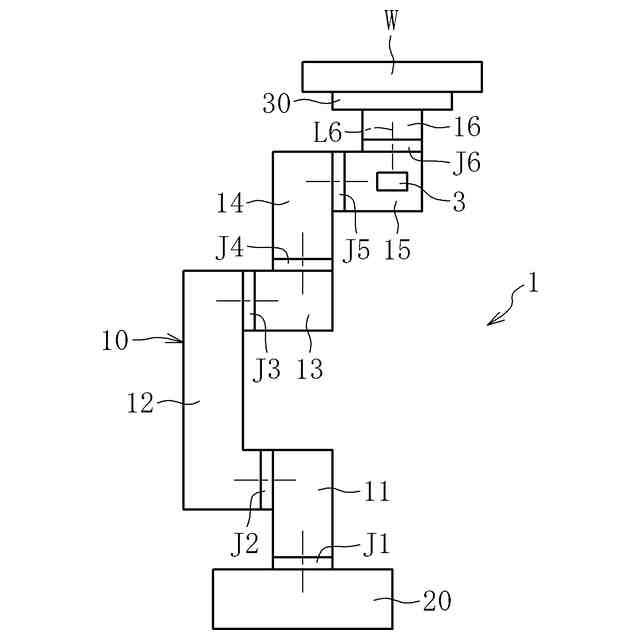
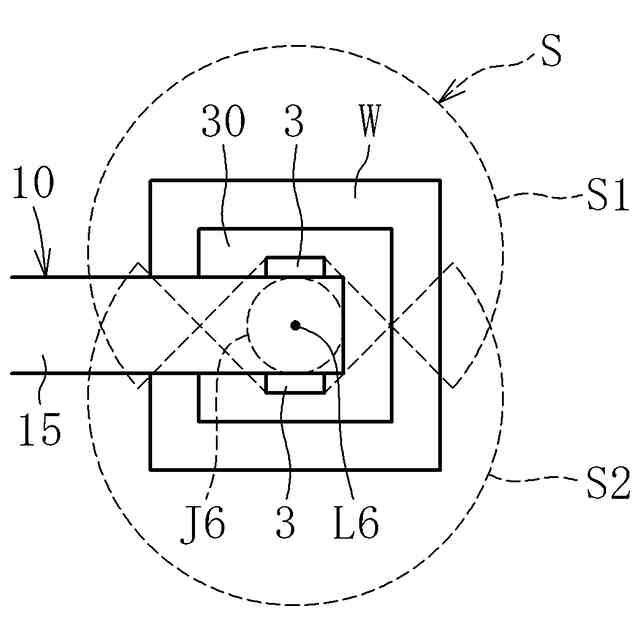
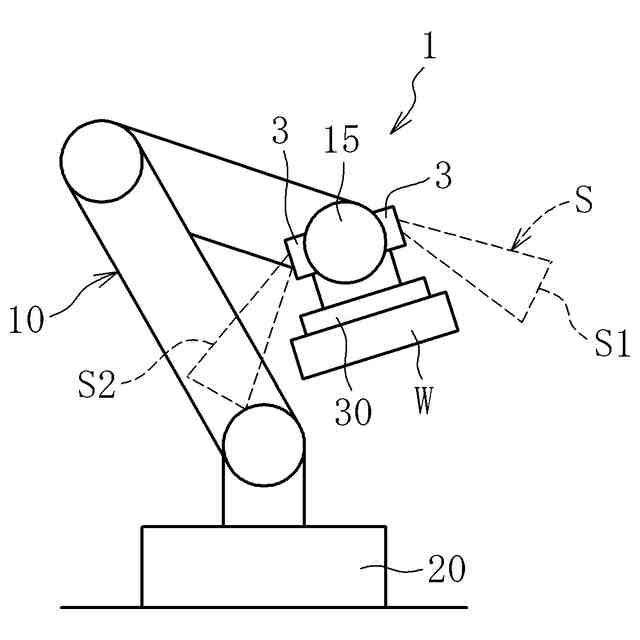
【解決手段】ロボットアーム10に、ツール30付近に設定された検出範囲S内における物体の有無を検出する物体検出手段3を取り付け、この物体検出手段3の検出結果に基づいて安全性を判定する判定部44を設ける。
【選択図】図1
特許請求の範囲
【請求項1】
先端にツールが取り付けられたロボットアームを備えたロボットを制御するロボット制御システムであって、
前記ロボットアームに取り付けられ、前記ツール付近に設定された検出範囲内における物体の有無を検出する物体検出手段と、前記物体検出手段の検出結果に基づいて安全性を判定する判定部とを有するロボット制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボット制御システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
人協働ロボットは、ISO/TS15066やJIS B 8433-1、8433-2に定められた安全要求事項を満たし、人と同じ環境で作業することができるロボットである。しかし、人協働ロボットのロボットアームの先端に取り付けられるツール(エンドエフェクタ)は、ユーザが自由に取り換えることができるため、ロボット自身が安全であっても、ツールに鋭利なエッジや突起があれば、人に危害を加える恐れがある。また、ロボットアームの先端に取り付けた搬送用ツールでワークを把持した場合、ワークに鋭利なエッジがあったり、ワークの重量によるエネルギーや移動速度による運動エネルギーが生じたりすることで、ワークが危険源となり得る。従って、ロボットアーム自体が、上記の規格の要件を満たしていることで安全性が保証されていても、その先端に取り付けられたツール及びワークを含めた安全性を考慮する必要がある。このように、人協働ロボットは、物理的な防護柵を設けることなく人と同じ環境で作業できる点が注目されるが、実際は、ツール等と人との干渉を防止するための安全防護方策が必要となる。
【0003】
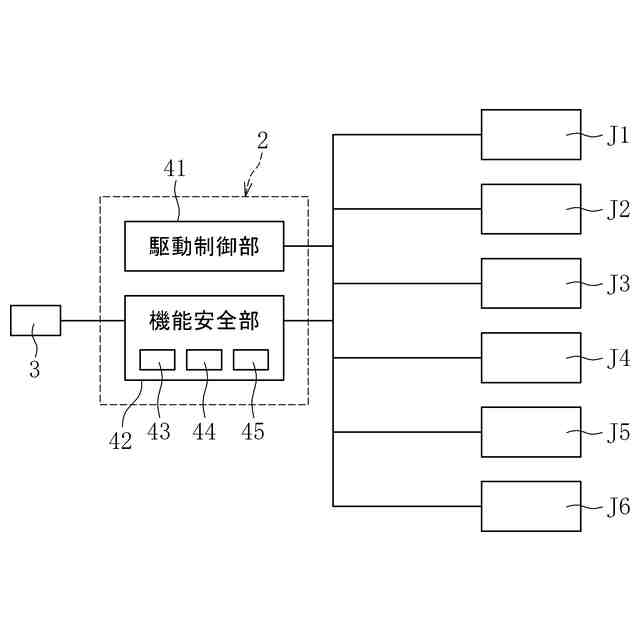
上記のような安全防護方策として、下記の特許文献1に示されたロボットの制御装置は、機能安全部と、物体接近検出部を有している。
【0004】
機能安全部は、ロボットに関する検出結果をモニターし、モニター結果に異常を認めた場合にロボットを緊急停止させることで、安全を確保するものである。例えば、機能安全部で設定される仮想空間内に仮想安全柵を設け、ロボットアーム及びこれに取り付けられたツールやワークが仮想安全柵に接触したらロボットを緊急停止させることで、ツールやワークを含む可動体を常に所定範囲内(仮想安全柵内)で稼動させることができる。
【0005】
物体接近検出部は、例えば、ライトカーテンやレーザスキャナ等で構成され、ロボットに物体(人)が予め設定された距離よりも接近したことを検出すると、ロボットを緊急停止させることで安全が確保される。下記の特許文献1では、物体接近検出部が固定側(具体的には、ロボットシステムの基台)に設けられている。
【先行技術文献】
【特許文献】
【0006】
特開2020-11357号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記のような安全防護方策では、作業者が作業できるエリアは、機能安全部で設定された仮想安全柵の外側に相当する領域で、且つ、物体接近検出部の検出範囲外の領域に限られる。ロボットアームの先端に設けられるツールやワークを考慮した場合、上記の仮想安全柵で囲まれる領域や物体接近検出部の検出範囲は広めに設定する必要があるため、作業者の作業可能範囲がさらに限定されて、人協働ロボットを用いることによるメリットが十分に享受できない。
【0008】
そこで、本発明は、作業者が人協働ロボットと共に作業を行うにあたり、作業者がなるべく人協働ロボットの近くで安全に作業可能とすることを目的とする。
【課題を解決するための手段】
【0009】
前記課題を解決するために、本発明は、先端にツールが取り付けられたロボットアームを備えたロボットを制御するロボット制御システムであって、
前記ロボットアームに取り付けられ、前記ツール付近に設定された検出範囲内における物体の有無を検出する物体検出手段と、前記物体検出手段の検出結果に基づいて安全性を判定する判定部とを有するロボット制御システムを提供する。
【0010】
このように、物体検出手段を、固定側ではなく、可動側であるロボットアームに設けることで、物体検出手段の検出範囲が、ロボットアームの動作に伴って移動する。そのため、ロボットアームが動いた場合でも、常に、ロボットアームの先端のツール周囲に検出範囲を設定することができる。このように、移動するツールの近傍に、物体(人)の有無を検出する検出範囲を連続的に生成することで、固定的な検出範囲を設ける場合と比べて、人が侵入できないエリアを最小限に抑えることができるため、人がロボットの近くで作業することが可能となる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
1か月前
川崎重工業株式会社
ロボット
2か月前
株式会社不二越
ロボット
2か月前
CKD株式会社
把持装置
1日前
トヨタ自動車株式会社
学習装置
16日前
株式会社竹中工務店
補助セット
2か月前
ダイセイ株式会社
ロボット自動刻印装置
1日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボット
2か月前
瓜生製作株式会社
電動締付工具
9日前
株式会社安川電機
ロボット
1か月前
川崎重工業株式会社
塗装システム
1か月前
株式会社三共コーポレーション
工具保持具
1か月前
株式会社マキタ
集塵アタッチメント
8日前
株式会社不二越
垂直多関節ロボット
16日前
トヨタ自動車株式会社
軌道生成装置
2か月前
アネックスツール株式会社
ドライバービット
2か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社マキタ
現場用作業機
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
ワールド技研株式会社
ロボットセル装置
2か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
回転打撃工具
2か月前
NTN株式会社
ハンド
2か月前
セイコーエプソン株式会社
ロボット
2か月前
トヨタ自動車株式会社
ロボットの制御装置
2か月前
山九株式会社
レンチ保持治具
2か月前
NTN株式会社
把持装置
2か月前
ニデックインスツルメンツ株式会社
産業用ロボット
29日前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
電動工具
16日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ