TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025142795
公報種別
公開特許公報(A)
公開日
2025-10-01
出願番号
2024042356
出願日
2024-03-18
発明の名称
把持装置
出願人
NTN株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
15/08 20060101AFI20250924BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】段取り替え時に把持する対象のワークの高さが異なる場合でも、簡単に爪の根元から揺動回転軸までの長さを変更することができる把持装置を提供する。
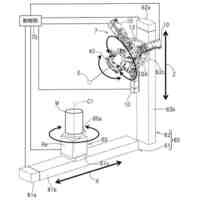
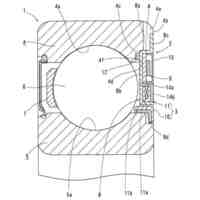
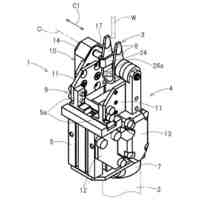
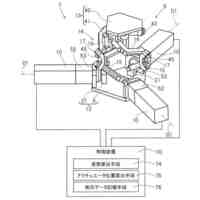
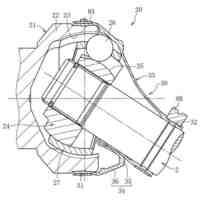
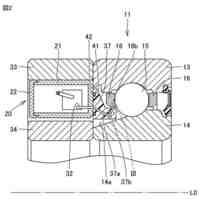
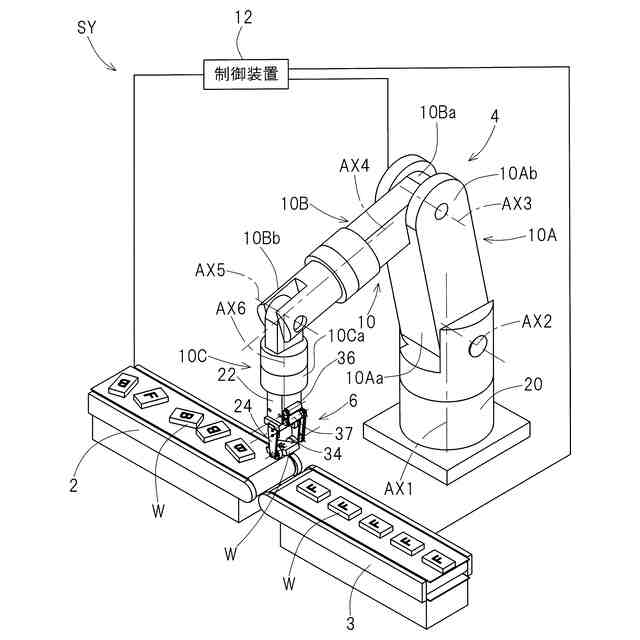
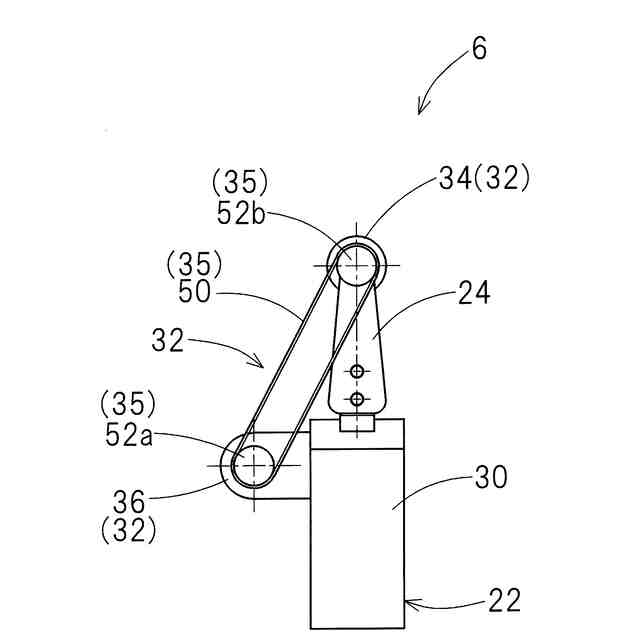
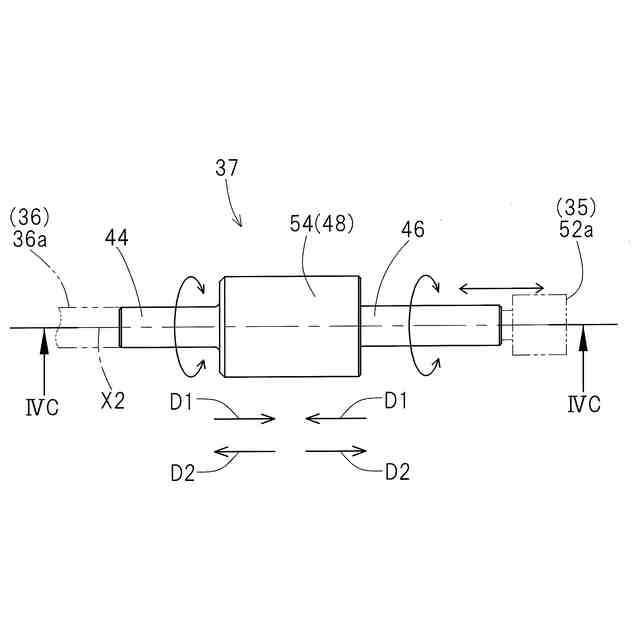
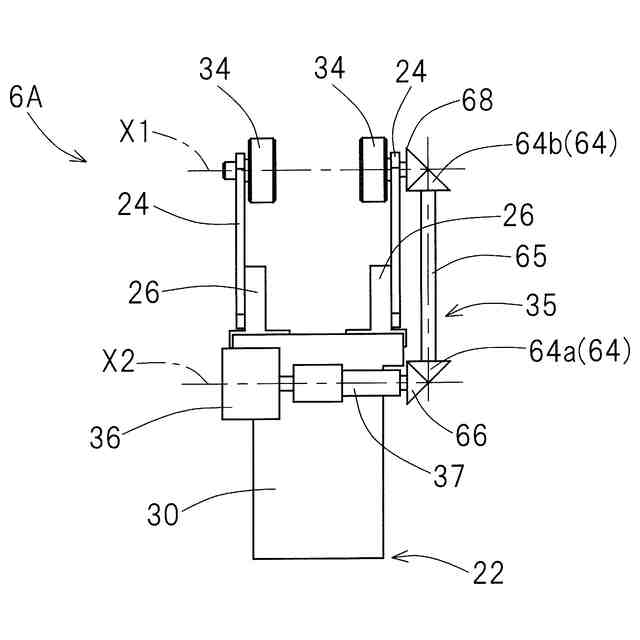
【解決手段】本開示の把持装置6は、ワークWを把持または解放する複数の爪部24と、開閉方向に爪部24を移動させる把持部22と、爪部24で把持されたワークWを開閉方向に平行な回転軸心X1回りに回転させる回転伝達機構32とを備えている。回転伝達機構32は、各爪部24に取り付けられて爪部24とともに開閉方向に移動し、爪部24に対して回転軸心X1回りに回転可能な回転部34と、回転部34を回転駆動させる第2駆動源36と、回転部34に連結されて回転部34とともに開閉方向に移動し、第2駆動源36の動力を回転部34に伝達する動力伝達機構と、開閉方向に伸縮可能で、且つ、第2駆動源36の回転を動力伝達機構35に伝達する伸縮回転機構37とを有している。
【選択図】図2A
特許請求の範囲
【請求項1】
ワークを把持または解放する複数の爪部と、
前記ワークを把持する把持方向および前記ワークを離す解放方向に前記爪部を移動させる把持部と、
前記爪部で把持された前記ワークを把持方向および解放方向に平行な回転軸心回りに回転させる回転伝達機構と、
を備え、
前記把持部は、前記爪部が取り付けられて把持方向および解放方向に移動する把持機構と、前記把持機構を把持方向および解放方向に移動させる第1駆動源とを有し、
前記回転伝達機構は、
複数の前記爪部の各々に取り付けられて前記爪部とともに把持方向および解放方向に移動し、前記爪部に対して前記回転軸心回りに回転可能な回転部と、
前記回転部を前記回転軸心回りに回転駆動させる第2駆動源と、
少なくとも一つの前記回転部に連結されて前記回転部とともに把持方向および解放方向に移動し、前記第2駆動源の動力を前記回転部に伝達する動力伝達機構と、
前記把持方向および解放方向に伸縮可能で、且つ、前記第2駆動源の回転を前記動力伝達機構に伝達する伸縮回転機構と、を有している把持装置。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の把持装置において、前記回転伝達機構と前記爪部が一体化されてサブアッシーを構成し、
前記サブアッシーが、前記把持部に取り付けられている把持装置。
【請求項3】
請求項1または2に記載の把持装置において、前記伸縮回転機構が、
前記第2駆動源の出力軸に連結される第1の回転軸と、
前記動力伝達機構の入口回転体に連結される第2の回転軸と、
前記第1の回転軸の回転を前記第2の回転軸に伝達するとともに、前記第1の回転軸に対して前記第2の回転軸を前記把持方向および解放方向に移動可能に支持する伸縮回転構造体と、を有している把持装置。
【請求項4】
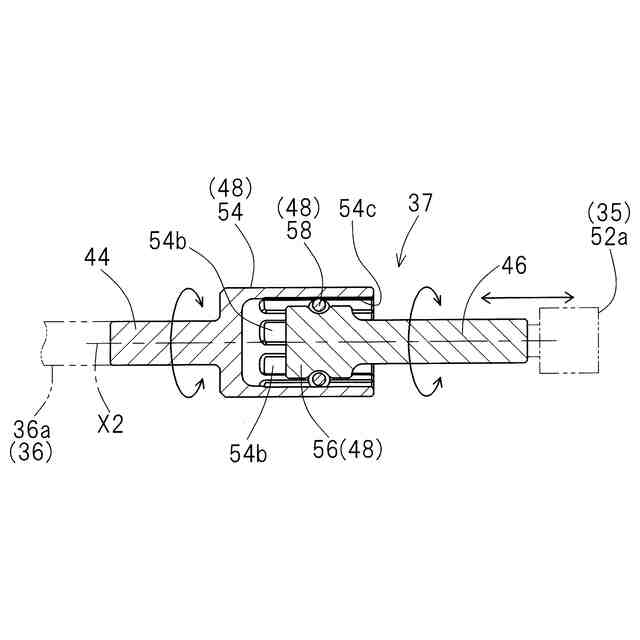
請求項3に記載の把持装置において、前記伸縮回転構造体が、
前記第1の回転軸および前記第2の回転軸の一方の軸端部に設けられた筒状の外側部材と、
前記第1の回転軸および前記第2の回転軸の他方の軸端部に設けられて、前記外側部材の中空孔に挿通された内側部材と、
前記外側部材と前記内側部材との間に介在されて、前記外側部材の回転を前記内側部材に伝達するとともに、前記第1の回転軸に設けられた部材に対して前記第2の回転軸に設けられた部材を前記把持方向および解放方向に移動可能に支持する転動体と、
を有している把持装置。
【請求項5】
請求項3に記載の把持装置において、前記伸縮回転構造体が、
前記第1の回転軸および前記第2の回転軸の一方に設けられて、前記把持機構の開閉幅よりも軸方向寸法が長い第1の歯車と、
前記第1の回転軸および前記第2の回転軸の他方に設けられ、前記第1の歯車と噛み合って、前記第1の歯車の回転が伝達されるとともに、前記第1の歯車に対して前記把持方向および解放方向に移動可能な第2の歯車と、
を有している把持装置。
【請求項6】
請求項1または2に記載の把持装置において、前記第2駆動源がモータである把持装置。
【請求項7】
請求項1または2に記載の把持装置において、前記動力伝達機構が、帯状の無端動力伝達部材を有している把持装置。
【請求項8】
請求項1または2に記載の把持装置において、前記動力伝達機構が、両端部に傘歯車が設けられたロッドを有している把持装置。
【請求項9】
請求項1または2に記載の把持装置において、前記動力伝達機構が、複数の平歯車を有している把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、機械部品、電子部品等のワークを把持する把持装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
多関節ロボット等の先端に設置されたハンドにおいて、爪を直線方向に開閉することでワークを把持し、爪で把持した状態でワークの姿勢を変更するものがある(例えば、特許文献1,2)。
【先行技術文献】
【特許文献】
【0003】
特許5617512号公報
特許6029561号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
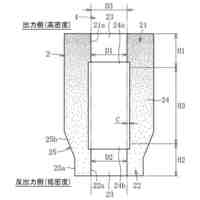
特許文献1のハンドは、爪の開閉方向に延びるシャフトに回転可能にナットが設けられ、このナットを介して爪に回転を伝達することで、ワークを把持したまま爪を揺動させている。特許文献2のハンドは、爪の開閉方向に延びるボールねじにナットが螺合され、このナットを介して爪に回転を伝達することで、ワークを把持したまま爪を揺動させている。このように、特許文献1および2のハンドでは、ワークを把持する機構と、把持したワークの姿勢を変更する機構とが一体になっている。そのため、例えば、段取り替え時に把持する対象のワークの高さが異なる場合、爪の根元から揺動回転軸までの長さを簡単に変更することができなかった。
【0005】
本発明の目的は、段取り替え時に把持する対象のワークの高さが異なる場合でも、簡単に爪の根元から揺動回転軸までの長さを変更することができる把持装置を提供する。
【課題を解決するための手段】
【0006】
本発明の把持装置は、
ワークを把持または解放する複数の爪部と、
前記ワークを把持する把持方向および前記ワークを離す解放方向に前記爪部を移動させる把持部と、
前記爪部で把持された前記ワークを把持方向および解放方向に平行な回転軸心回りに回転させる回転伝達機構と、
を備え、
前記把持部は、前記爪部が取り付けられて把持方向および解放方向に移動する把持機構と、前記把持機構を把持方向および解放方向に移動させる第1駆動源とを有し、
前記回転伝達機構は、
複数の前記爪部の各々に取り付けられて前記爪部とともに把持方向および解放方向に移動し、前記爪部に対して前記回転軸心回りに回転可能な回転部と、
前記回転部を前記回転軸心回りに回転駆動させる第2駆動源と、
少なくとも一つの前記回転部に連結されて前記回転部とともに把持方向および解放方向に移動し、前記第2駆動源の動力を前記回転部に伝達する動力伝達機構と、
前記把持方向および解放方向に伸縮可能で、且つ、前記第2駆動源の回転を前記動力伝達機構に伝達する伸縮回転機構と、を有している。
【0007】
この構成によれば、把持部の把持機構に取り付けられた爪部の先端に、回転伝達機構の回転部が別途設けられており、回転部が、爪部の把持方向および解放方向に平行な回転軸心回りにワークを回転させる。把持機構は第1駆動源の動力で移動し、回転部は第2駆動源の動力で回転する。つまり、把持機構と回転部は独立して設けられている。これにより、段取り替え時に把持する対象のワークの高さが異なる場合であっても、爪部およびこれに支持された回転伝達機構の交換で済み、把持部を変更する必要はない。その結果、爪部の根元から回転軸までの長さを簡単に変更することができる。
【0008】
また、第2駆動源が、把持部の把持機構とともに把持方向および解放方向に移動しない。そのため、把持方向および解放方向に対する負荷が小さくなるから、把持機構が高速に動作可能となる。さらに、把持部全体ではなく回転部のみを回転させるので、回転対象がワークと回転部のみとなり、回転対象の重量および慣性モーメントが小さくなる。その結果、回転部の高速回転および第2駆動源の低トルク化が可能となり、第2駆動源の小型化、軽量化を図ることができる。
【0009】
本発明において、前記回転伝達機構と前記爪部が一体化されてサブアッシーを構成し、前記サブアッシーが前記把持部に取り付けられていてもよい。具体的には、回転部、爪部、動力伝達機構、伸縮回転機構および第2駆動源が一体化されている。この構成によれば、回転伝達機構を有する爪部を既存の把持部に適用できる。特に、把持機構のサイズ、爪部の長さに対応しやすいので、汎用性が高い。
【0010】
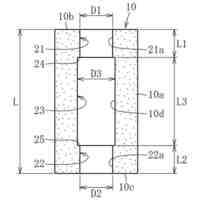
本発明において、前記伸縮回転機構が、前記第2駆動源の出力軸に連結される第1の回転軸と、前記動力伝達機構の入口回転体に連結される第2の回転軸と、前記第1の回転軸の回転を前記第2の回転軸に伝達するとともに、前記第1の回転軸に対して前記第2の回転軸を前記把持方向および解放方向に移動可能に支持する伸縮回転構造体とを有していてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
NTN株式会社
玉軸受
2か月前
NTN株式会社
作業装置
2か月前
NTN株式会社
焼成軸受
1か月前
NTN株式会社
密封装置
2か月前
NTN株式会社
軸受装置
2か月前
NTN株式会社
軸受装置
2か月前
NTN株式会社
焼結軸受
2か月前
NTN株式会社
軸受装置
2か月前
NTN株式会社
把持装置
5日前
NTN株式会社
焼成軸受
1か月前
NTN株式会社
軸受装置
2か月前
NTN株式会社
焼入れ方法
1か月前
NTN株式会社
転がり軸受
2か月前
NTN株式会社
荷積込装置
2か月前
NTN株式会社
ボールねじ
1か月前
NTN株式会社
転がり軸受
2か月前
NTN株式会社
回転伝達装置
2か月前
NTN株式会社
回転伝達装置
2か月前
NTN株式会社
シール付軸受
2か月前
NTN株式会社
リンク作動装置
2か月前
NTN株式会社
車輪用軸受装置
2か月前
NTN株式会社
円すいころ軸受
1か月前
NTN株式会社
ボールねじ装置
1か月前
NTN株式会社
ボールねじ装置
1か月前
NTN株式会社
車輪用軸受装置
2か月前
NTN株式会社
軸受装置及び間座
2か月前
NTN株式会社
密封装置付き軸受
1か月前
NTN株式会社
シェル形針状ころ軸受
2か月前
NTN株式会社
等速自在継手用ブーツ
2か月前
NTN株式会社
ブーツ付等速自在継手
2か月前
NTN株式会社
転がり軸受の設計方法
1か月前
NTN株式会社
転動部材及び転動部品
12日前
NTN株式会社
軸受装置および機械装置
2か月前
NTN株式会社
環状部品の抜け止め構造
1か月前
NTN株式会社
等速自在継手の外側継手部材
2か月前
NTN株式会社
連結機構及びこれを備えた研削盤
2か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ