TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025167616
公報種別
公開特許公報(A)
公開日
2025-11-07
出願番号
2024072427
出願日
2024-04-26
発明の名称
産業用ロボット
出願人
ニデックインスツルメンツ株式会社
代理人
個人
主分類
B25J
9/06 20060101AFI20251030BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
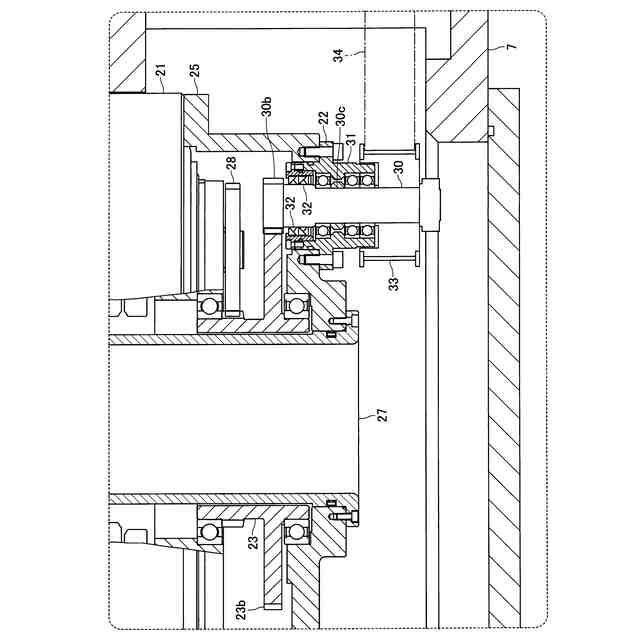
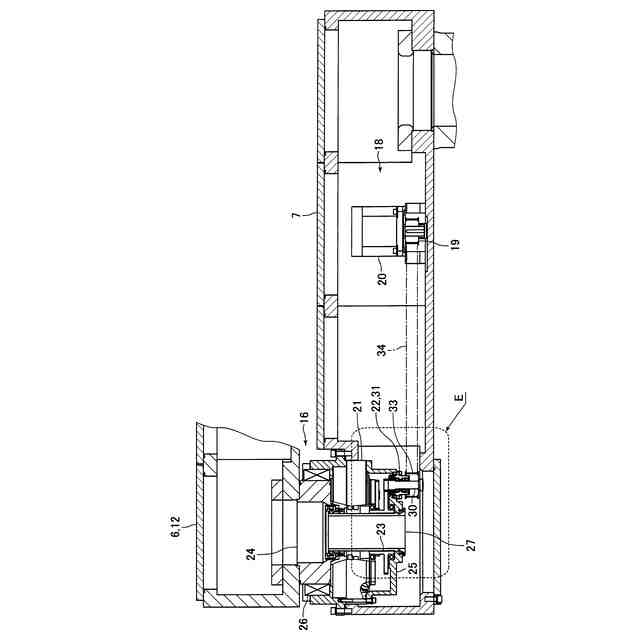
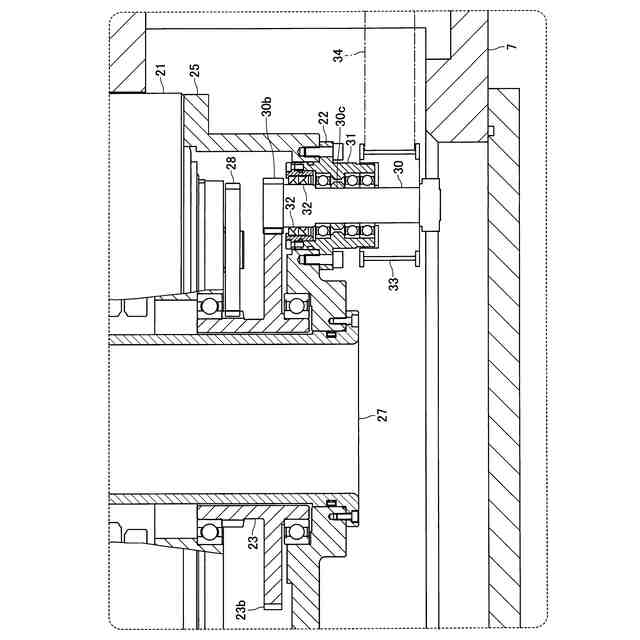
【解決手段】この産業用ロボットは、関節部に配置される中空減速機21と、モータの回転を減速して中空減速機21に伝達するための減速機構22とを備えている。中空減速機21の入力軸23は、中空減速機21のケース体25に収容され、中空減速機21の径方向の中心に配置される固定軸27の一部は、入力軸23の内周側に配置されている。減速機構22の入力用回転軸30は、ケース体25に回転可能に保持される被保持部30cを備え、ケース体25の内部で入力軸23に連結されるとともに、ケース体25の外部でモータに連結されている。ケース体25の内部からの潤滑剤の漏れを防止するためシール部材32は、被保持部30cの外周側に配置され、シール部材32の内周面は、被保持部30cの外周面に接触している。被保持部30cの外径は、固定軸27の外径よりも小さくなっている。
【選択図】図4
特許請求の範囲
【請求項1】
関節部を備える産業用ロボットにおいて、
モータと、前記関節部に配置される中空減速機と、前記モータの回転を減速して前記中空減速機に伝達するための減速機構とを備え、
前記中空減速機は、中空状に形成される入力軸と、前記入力軸を回転可能に保持するケース体と、前記ケース体に固定されるとともに前記中空減速機の径方向の中心に配置される円筒状の固定軸とを備え、
前記減速機構は、前記入力軸および前記モータに連結される入力用回転軸と、前記ケース体の内部からの潤滑剤の漏れを防止するための環状のシール部材とを備え、
前記入力軸は、前記ケース体の内部に配置され、
前記固定軸の一部は、前記入力軸の内周側に配置され、
前記入力用回転軸は、前記ケース体に回転可能に保持される被保持部を備え、前記ケース体の内部で前記入力軸に連結されるとともに、前記ケース体の外部で前記モータに連結され、
前記入力軸の軸心と前記入力用回転軸の軸心とは、互いにずれた位置に配置され、
前記シール部材は、前記被保持部の外周側に配置され、
前記シール部材の内周面は、前記被保持部の外周面に接触し、
前記被保持部の外径は、前記固定軸の外径よりも小さくなっていることを特徴とする産業用ロボット。
続きを表示(約 350 文字)
【請求項2】
前記入力用回転軸の一端部には、前記ケース体の内部に配置される歯車が形成または固定され、
前記入力用回転軸の他端部には、前記ケース体の外部に配置されるプーリが形成または固定されていることを特徴とする請求項1記載の産業用ロボット。
【請求項3】
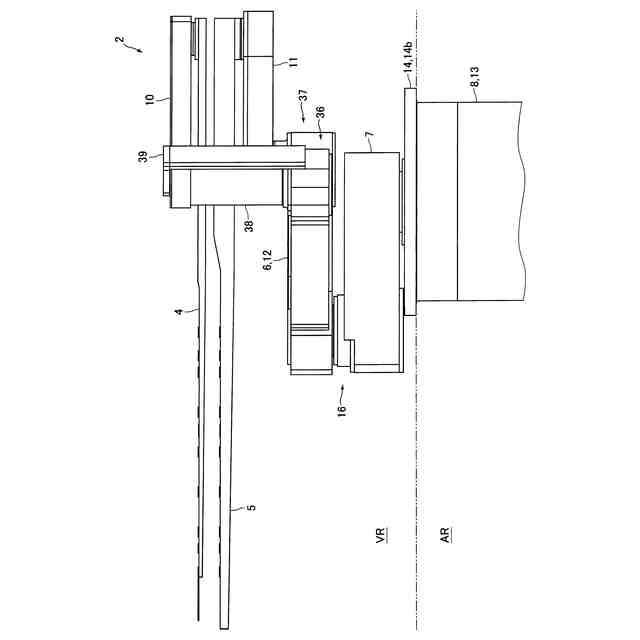
搬送対象物が搭載されるハンドと、前記ハンドが先端側に回動可能に連結されるアームと、前記アームの基端側が回動可能に連結されるアーム支持部とを備え、
少なくとも、前記アームと前記アーム支持部との連結部が前記関節部になっていることを特徴とする請求項1または2記載の産業用ロボット。
【請求項4】
前記中空減速機は、偏心揺動型減速機であることを特徴とする請求項1または2記載の産業用ロボット。
発明の詳細な説明
【技術分野】
【0001】
本発明は、産業用ロボットに関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
従来、真空中でガラス基板を搬送するための産業用ロボットが知られている(たとえば、特許文献1参照)。特許文献1に記載の産業用ロボットは、基板が搭載される2個のハンドと、2個のハンドが連結されるアームと、アームが連結されるスイングアームと、スイングアームが連結される本体部とを備えている。アームは、2個のハンドのそれぞれが先端側に回動可能に連結される2個の先端側アームと、2個の先端側アーム部の基端側が回動可能に連結されるとともにスイングアームの先端側に回動可能に連結される共通アーム部とを備えている。
【0003】
特許文献1に記載の産業用ロボットは、共通アーム部に対して先端側アーム部を回動させるとともに先端側アーム部に対してハンドを回動させる第1駆動機構および第2駆動機構と、スイングアームに対して共通アーム部を回動させる第3駆動機構とを備えている。第3駆動機構は、モータと、モータに連結される減速機とを備えている。減速機は、スイングアームと共通アーム部との連結部である関節部に配置されている。減速機は、中空波動歯車装置である。すなわち、減速機は、中空減速機である。減速機の入力軸は、中空状に形成されており、減速機の径方向の中心に配置されている。
【0004】
特許文献1に記載の産業用ロボットでは、減速機の入力軸は、減速機のケース体に回転可能に保持されている。入力軸の一端部には、ケース体の外部に配置されるプーリが固定されている。ケース体の内部には、潤滑剤としてのグリースが収容されている。入力軸の外周側には、ケース体の内部からグリースが漏れるのを防止するための円環状のシール部材が配置されている。シール部材の内周面は、入力軸の外周面に所定の接触圧で接触している。入力軸の内周側には、円筒状の固定軸が配置されている。固定軸の内周側には、第1駆動機構および第2駆動機構から引き出される配線等が配置されている。
【先行技術文献】
【特許文献】
【0005】
特開2023-54398号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1に記載の産業用ロボットでは、関節部に配置される減速機において、固定軸の内周側に配線等が配置されており、固定軸の外径が大きくなりやすい。そのため、この産業用ロボットでは、固定軸が内周側に配置される入力軸の外径も大きくなりやすい。入力軸の外径が大きくなると、入力軸の回転速度が一定であっても、入力軸の外周面の速度(周速)が速くなって、入力軸の外周面とシール部材の内周面との間で発熱しやすくなる。入力軸の外周面とシール部材の内周面との間で発熱すると、ケース体に収容されるグリースの温度が高くなってグリースの粘度が低下するおそれがある。したがって、特許文献1に記載の産業用ロボットの場合、たとえば、厳しい使用条件で産業用ロボットが使用されると、ケース体に収容されるグリースの粘度が低下して、ケース体の内部からグリースが漏れるおそれが生じる。
【0007】
そこで、本発明の課題は、関節部に中空減速機が配置されている産業用ロボットにおいて、たとえば、厳しい使用条件で産業用ロボットが使用されても、中空減速機のケース体の内部からの潤滑剤の漏れを抑制することが可能な産業用ロボットを提供することにある。
【課題を解決するための手段】
【0008】
上記の課題を解決するため、本発明の一態様の産業用ロボットは、関節部を備える産業用ロボットにおいて、モータと、関節部に配置される中空減速機と、モータの回転を減速して中空減速機に伝達するための減速機構とを備え、中空減速機は、中空状に形成される入力軸と、入力軸を回転可能に保持するケース体と、ケース体に固定されるとともに中空減速機の径方向の中心に配置される円筒状の固定軸とを備え、減速機構は、入力軸およびモータに連結される入力用回転軸と、ケース体の内部からの潤滑剤の漏れを防止するための環状のシール部材とを備え、入力軸は、ケース体の内部に配置され、固定軸の一部は、入力軸の内周側に配置され、入力用回転軸は、ケース体に回転可能に保持される被保持部を備え、ケース体の内部で入力軸に連結されるとともに、ケース体の外部でモータに連結され、入力軸の軸心と入力用回転軸の軸心とは、互いにずれた位置に配置され、シール部材は、被保持部の外周側に配置され、シール部材の内周面は、被保持部の外周面に接触し、被保持部の外径は、固定軸の外径よりも小さくなっていることを特徴とする。
【0009】
本態様の産業用ロボットでは、モータの回転を減速して中空減速機に伝達するための減速機構は、中空減速機の入力軸およびモータに連結される入力用回転軸を備えており、入力軸の軸心と入力用回転軸の軸心とは、互いにずれた位置に配置されている。また、本態様では、入力軸は、ケース体の内部に配置され、かつ、入力用回転軸は、ケース体の内部で入力軸に連結されるとともに、ケース体の外部でモータに連結されている。さらに、本態様では、ケース体の内部から潤滑剤の漏れを防止するためのシール部材の内周面が接触する入力用回転軸の被保持部の外径は、固定軸の外径よりも小さくなっている。
【0010】
そのため、本態様では、入力軸の内周側に配置される円筒状の固定軸の内周側に、たとえば、配線等が配置されていて、固定軸および入力軸の外径が大きくなっていても、入力用回転軸の被保持部の外径を小さくすることが可能になる。したがって、本態様では、シール部材の内周面が接触する被保持部の外周面の速度(周速)を遅くすることが可能になる。その結果、本態様では、入力用回転軸の被保持部の外周面とシール部材の内周面との間の発熱を抑制することが可能になる。そのため、本態様では、たとえば、厳しい使用条件で産業用ロボットが使用されても、ケース体に収容される潤滑剤の粘度の低下を抑制して、ケース体の内部からの潤滑剤の漏れを抑制することが可能になる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
25日前
川崎重工業株式会社
ロボット
2か月前
株式会社竹中工務店
補助セット
1か月前
トヨタ自動車株式会社
学習装置
10日前
株式会社不二越
ロボット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社不二越
移動ロボットシステム
2か月前
トヨタ自動車株式会社
ロボット
1か月前
瓜生製作株式会社
電動締付工具
3日前
川崎重工業株式会社
塗装システム
1か月前
本田技研工業株式会社
装置
2か月前
株式会社安川電機
ロボット
1か月前
株式会社三共コーポレーション
工具保持具
25日前
株式会社不二越
垂直多関節ロボット
10日前
株式会社マキタ
集塵アタッチメント
2日前
トヨタ自動車株式会社
軌道生成装置
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
1か月前
アネックスツール株式会社
ドライバービット
1か月前
シンフォニアテクノロジー株式会社
搬送装置
2か月前
株式会社マキタ
回転打撃工具
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
ワールド技研株式会社
ロボットセル装置
1か月前
株式会社マキタ
現場用作業機
1か月前
NTN株式会社
ハンド
2か月前
セイコーエプソン株式会社
ロボット
1か月前
トヨタ自動車株式会社
ロボットの制御装置
1か月前
山九株式会社
レンチ保持治具
1か月前
株式会社マキタ
電動工具
2か月前
株式会社マキタ
電動工具
2か月前
ニデックインスツルメンツ株式会社
産業用ロボット
23日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ