TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154949
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024058260
出願日
2024-03-29
発明の名称
ワーク搬送ロボット
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
13/08 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットアーム部におけるワーク保持ハンドの取り付け位置から離間した位置にセンサ部を配置することなく、ワーク保持ハンドの取り付け位置から離間した位置を検出することが可能なワーク搬送ロボットを提供する。
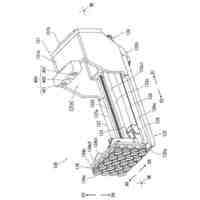
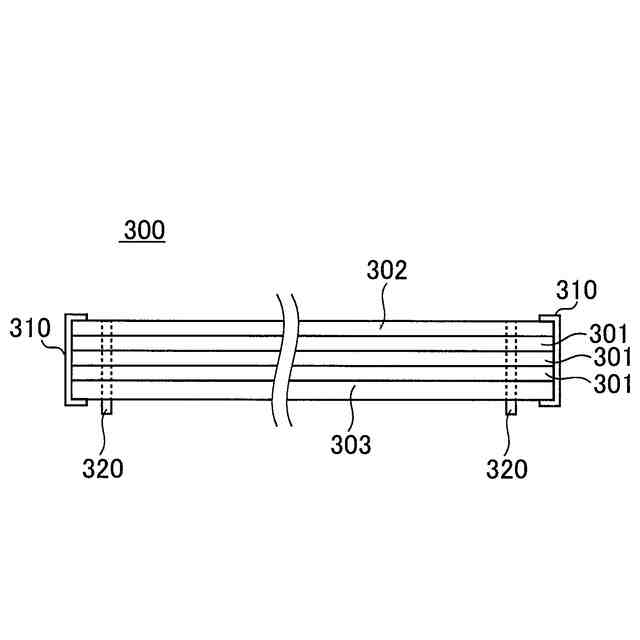
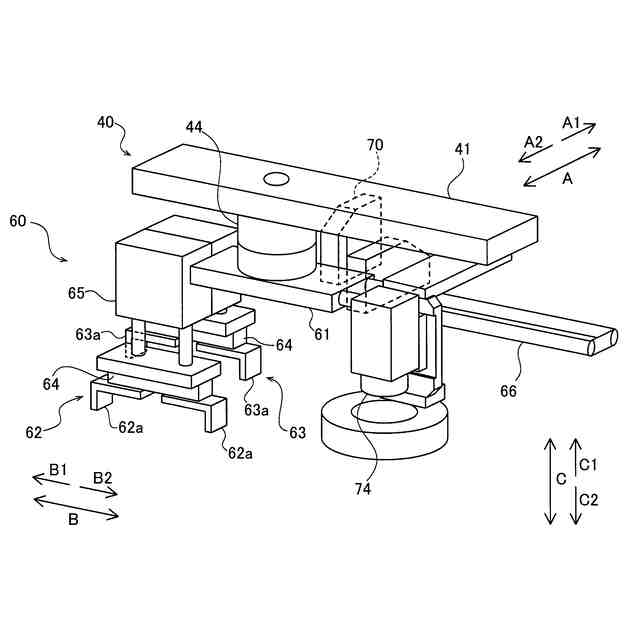
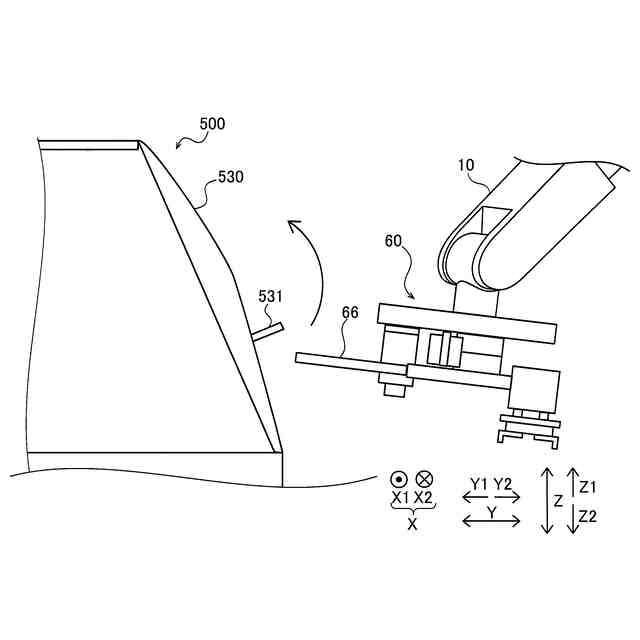
【解決手段】この基板搬送ロボット100は、ロボットアーム部と、ロボットアーム部に取り付けられ、基板300を保持するハンド50と、ロボットアーム部に取り付けられ、基板載置部を含む検出対象の位置を検出するために、検出光を照射するとともに検出光を受光するセンサ部70と、ハンド50に配置され、センサ部70から照射された検出光を検出対象に向かって反射するとともに、検出対象から反射された検出光をセンサ部70に向かって反射するミラー部73と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットアーム部と、
前記ロボットアーム部に取り付けられ、ワークを保持するワーク保持ハンドと、
前記ロボットアーム部に取り付けられ、前記ワークが載置されるワーク載置部を含む検出対象の位置を検出するために、検出光を照射するとともに前記検出光を受光するセンサ部と、
前記ワーク保持ハンドに配置され、前記センサ部から照射された前記検出光を前記検出対象に向かって反射するとともに、前記検出対象から反射された前記検出光を前記センサ部に向かって反射するミラー部と、を備える、ワーク搬送ロボット。
続きを表示(約 1,700 文字)
【請求項2】
前記ワーク保持ハンドに配置され、前記ミラー部を移動させる移動機構をさらに備える、請求項1に記載のワーク搬送ロボット。
【請求項3】
前記ワーク保持ハンドは、前記ワークの端部を把持する把持部を含み、
前記移動機構は、前記ワークの大きさに応じて前記把持部を移動させ、
前記ミラー部は、前記移動機構により前記把持部と一体的に移動される、請求項2に記載のワーク搬送ロボット。
【請求項4】
前記把持部とは別個に前記ワーク保持ハンドに配置され、載置された状態の前記ワークを移動させるために前記ワークに当接する当接部材をさらに備え、
前記把持部、前記ミラー部、および、前記当接部材は、前記移動機構により一体的に移動される、請求項3に記載のワーク搬送ロボット。
【請求項5】
前記移動機構は、前記ミラー部を前記検出光の照射方向に沿って直線移動させる直線移動機構を含み、
前記センサ部は、前記ロボットアーム部に固定されている、請求項2~4のいずれか1項に記載のワーク搬送ロボット。
【請求項6】
前記ワーク保持ハンドは、所定の方向に沿って延びる支持部を含み、前記支持部の延びる方向の一方側において前記ロボットアーム部に取り付けられ、
前記センサ部は、前記支持部の延びる方向の一方側に配置されており、
前記ミラー部は、前記ワーク保持ハンドにおいて前記支持部の延びる方向の他方側に配置されている、請求項1~4のいずれか1項に記載のワーク搬送ロボット。
【請求項7】
前記ワーク保持ハンドが交換可能に取り付けられるツール取り付け部をさらに備え、
前記ロボットアーム部は、前記ツール取り付け部を介して前記ワーク保持ハンドが取り付けられ、
前記センサ部は、前記ツール取り付け部を介して前記ロボットアーム部に取り付けられている、請求項1~4のいずれか1項に記載のワーク搬送ロボット。
【請求項8】
前記ワークに対して処理を行うための処理部材を収納する処理部材カートリッジを保持するカートリッジ保持ハンドをさらに備え、
前記ツール取り付け部は、前記ワーク保持ハンド、および、前記カートリッジ保持ハンドのいずれかが交換可能に取り付けられ、
前記ロボットアーム部は、前記ツール取り付け部を介して前記カートリッジ保持ハンドおよび前記ワーク保持ハンドのいずれかが取り付けられ、
前記センサ部は、前記ツール取り付け部を介して、前記ワーク保持ハンド、および、前記カートリッジ保持ハンドのいずれかと一体的に前記ロボットアーム部に取り付けられている、請求項7に記載のワーク搬送ロボット。
【請求項9】
前記センサ部は、前記ツール取り付け部に前記ワーク保持ハンドが取り付けられている場合に、前記ミラー部に向かって前記検出光を照射する第1センサ部と、前記第1センサ部とは異なる方向に沿って前記検出光を照射する第2センサ部とを含み、
前記第2センサ部は、前記ワークに対して処理を行う処理装置において前記処理部材カートリッジが載置されるカートリッジ載置部を含む前記検出対象の位置を検出するために前記検出光を照射する、請求項8に記載のワーク搬送ロボット。
【請求項10】
前記センサ部の向きを、前記ミラー部に向かう第1の方向と前記検出対象に向かう第2の方向とに変更する方向転換機構をさらに備え、
前記センサ部は、
前記ツール取り付け部に前記ワーク保持ハンドが取り付けられている場合に、前記方向転換機構により向きを変更されることによって、前記第1の方向と前記第2の方向との各々に前記検出光を照射し、
前記ツール取り付け部に前記カートリッジ保持ハンドが取り付けられている場合に、前記ワークに対して処理を行う処理装置において前記処理部材カートリッジが載置されるカートリッジ載置部を含む前記検出対象の位置を検出するために、前記方向転換機構により前記第2の方向に向きを変更された状態で前記検出光を照射する、請求項8に記載のワーク搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ワーク搬送ロボットに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来、ワーク搬送ロボットが開示されている。特許文献1には、工業用ロボットが開示されている。工業用ロボットは、ワーク保持装置を備えている。ワーク保持装置は、ワークとなるガラス基板を保持する。
【先行技術文献】
【特許文献】
【0003】
特開平5-154431号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上記特許文献1に記載の工業用ロボットのようにワークとなる基板を保持することによって搬送する場合には、ロボットアーム部と、ロボットアーム部に取り付けられたワーク保持ハンドとを動作させることによって、ワークが搬送される。その場合に、ワークを載置する載置位置、または、載置されているワーク自体の位置を検出するためのセンサ部をワーク保持ハンドに取り付ける場合には、センサ部の重量に起因してロボットアーム部におけるワーク保持ハンドの取り付け位置に加わる荷重が大きくなる。また、ワーク保持ハンドの先端にセンサ部を配置する場合には、基板保持ハンドの取り付け位置に加わる荷重がより大きくなるため、基板保持ハンドの取り付け位置から離間した位置を検出することが困難となる。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットアーム部におけるワーク保持ハンドの取り付け位置から離間した位置にセンサ部を配置することなく、ワーク保持ハンドの取り付け位置から離間した位置を検出することが可能なワーク搬送ロボットを提供することである。
【課題を解決するための手段】
【0006】
この開示の一の局面によるワーク搬送ロボットは、ロボットアーム部と、ロボットアーム部に取り付けられ、ワークを保持するワーク保持ハンドと、ロボットアーム部に取り付けられ、ワークが載置されるワーク載置部を含む検出対象の位置を検出するために、検出光を照射するとともに検出光を受光するセンサ部と、ワーク保持ハンドに配置され、センサ部から照射された検出光を検出対象に向かって反射するとともに、検出対象から反射された検出光をセンサ部に向かって反射するミラー部と、を備える。
【0007】
この開示の一の局面による基板搬送ロボットは、上記のように、ワーク保持ハンドに配置され、センサ部から照射された検出光を検出対象に向かって反射するとともに、検出対象から反射された検出光をセンサ部に向かって反射するミラー部を備える。これにより、ミラー部によって、センサ部からの検出光を反射することができるので、ロボットアーム部におけるワーク保持ハンドの取り付け位置から離間した位置にセンサ部を配置することなく、ワーク保持ハンドの取り付け位置から離間した位置を検出できる。
【発明の効果】
【0008】
本開示によれば、ロボットアーム部におけるワーク保持ハンドの取り付け位置から離間した位置にセンサ部を配置することなく、ワーク保持ハンドの取り付け位置から離間した位置を検出できる。
【図面の簡単な説明】
【0009】
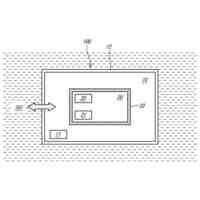
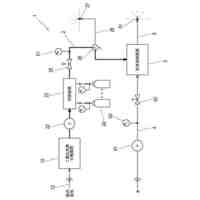
第1実施形態による基板搬送ロボットのブロック図を示す図である。
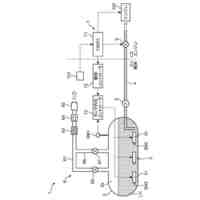
第1実施形態による基板搬送ロボットおよび処理装置を示す図である。
第1実施形態による基板を保持するハンドを先端側から見た斜視図である。
第1実施形態による基板を保持するハンドを基端側から見た斜視図である。
第1実施形態による基板を保持するハンドを側方から見た図である。
第1実施形態による基板搬送ロボットとは別個に配置された収容部と、自走式台車に配置された収容部とを示した図である。
基板の側面図である。
カートリッジを保持するハンドの斜視図である。
処理装置の扉部の開放を説明するための図である。
互いに異なる3つの位置の検出を説明するための図である。
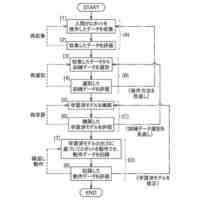
第1実施形態による基板搬送ロボットによる処理装置に対する搬送動作の制御方法を説明するためのフロー図である。
基板搬送ロボットとは別個に配置された収容部の検出を説明するための図である。
載置された基板の浮き状態の検出を説明するための図である。
第1実施形態による基板搬送ロボットによるカートリッジの交換動作の制御方法を説明するためのフロー図である。
第2実施形態による基板搬送ロボットのブロック図を示す図である。
第2実施形態による基板を保持するハンドを先端側から見た斜視図である。
方向転換機構によるセンサ部の向きの変更を説明するための図である。
方向転換機構の詳細を説明するための斜視図である。
【発明を実施するための形態】
【0010】
以下、本開示を具体化した本開示の実施形態を図面に基づいて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水中構造体
11日前
川崎重工業株式会社
遠心式ターボ機械
10日前
川崎重工業株式会社
廃棄物処理システム
23日前
川崎重工業株式会社
多段遠心ターボ機械
16日前
川崎重工業株式会社
バーナおよび燃焼器
11日前
川崎重工業株式会社
ダイクッション装置
10日前
川崎重工業株式会社
多段ラジアルタービン
2日前
川崎重工業株式会社
ガスタービンエンジン
12日前
川崎重工業株式会社
航空機の電気機械システム
12日前
川崎重工業株式会社
付加製造方法及び付加製造装置
10日前
川崎重工業株式会社
クローズドインペラの製造方法
13日前
川崎重工業株式会社
付加製造方法及び付加製造装置
10日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
10日前
横浜ゴム株式会社
多層空洞音響材
2日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
10日前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
12日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
10日前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
5日前
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
10日前
川崎重工業株式会社
ロボット
4日前
川崎重工業株式会社
学習済モデルの構築方法
9日前
川崎重工業株式会社
水素航空機の燃料供給システム
18日前
横浜ゴム株式会社
水中音響材の被取り付け面への取り付け構造および水中音響材
2日前
株式会社Eサーモジェンテック
熱電発電システムの製造方法
2日前
横浜ゴム株式会社
水中音響材の被取り付け面への取り付け構造および水中構造体の被取り付け面を水中音響材で覆う構造ならびに水中音響材
2日前
個人
フラワーホッチキス。
26日前
個人
手持ち挟持具
4日前
川崎重工業株式会社
ロボット
1か月前
株式会社不二越
ロボット
1か月前
株式会社竹中工務店
補助セット
1か月前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
13日前
株式会社マキタ
ハンマドリル
13日前
株式会社不二越
移動ロボットシステム
1か月前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ