TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025166091
公報種別
公開特許公報(A)
公開日
2025-11-05
出願番号
2025132325,2024078170
出願日
2025-08-07,2020-08-04
発明の名称
ロボット
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B25J
15/00 20060101AFI20251028BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】物品に対して側方からアプローチし搬送することを可能にするロボットハンド等を提供する
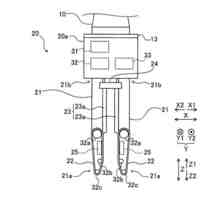
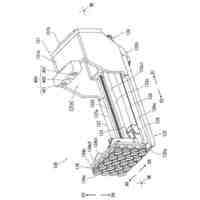
【解決手段】ロボットハンドは、物品を搬送するロボットハンドであって、前記物品を保持し且つ第1方向に移動する保持部と、前記物品を載せることができる搬送面を有し且つ前記第1方向に前記搬送面を移動させるように駆動する駆動ベルトと、前記駆動ベルトを駆動する第1駆動装置とを備え、前記保持部は、前記第1方向に移動することで、保持している前記物品を前記搬送面上に載せるように構成される。
【選択図】図3
特許請求の範囲
【請求項1】
物品を搬送するロボットハンドであって、
前記物品を保持し且つ第1方向に移動する保持部と、
前記物品を載せることができる搬送面を有し且つ前記第1方向に前記搬送面を移動させるように駆動する駆動ベルトと、
前記駆動ベルトを駆動する第1駆動装置とを備え、
前記保持部は、前記第1方向に移動することで、保持している前記物品を前記搬送面上に載せるように構成される
ロボットハンド。
続きを表示(約 990 文字)
【請求項2】
前記保持部は、前記搬送面と共に移動するように前記駆動ベルトに固定されている
請求項1に記載のロボットハンド。
【請求項3】
前記保持部を前記第1方向に移動させる第2駆動装置をさらに備える
請求項1に記載のロボットハンド。
【請求項4】
前記保持部は、前記第1方向と反対方向である第2方向に存在する前記物品を保持するように指向されている
請求項1~3のいずれか一項に記載のロボットハンド。
【請求項5】
前記保持部は、前記物品を付着させることで保持する付着部を有する
請求項1~4のいずれか一項に記載のロボットハンド。
【請求項6】
前記付着部は、前記物品を吸着する吸着装置を含む
請求項5に記載のロボットハンド。
【請求項7】
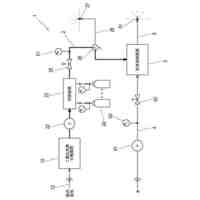
前記付着部は、複数の前記吸着装置を含み、
前記複数の吸着装置のうちの第1吸着装置は、第1系統を介して負圧発生装置と接続され、前記負圧発生装置が発生する負圧によって前記物品を吸着し、
前記複数の吸着装置のうちの第2吸着装置は、第2系統を介して前記負圧発生装置と接続され、前記負圧発生装置が発生する負圧によって前記物品を吸着し、
前記負圧発生装置は、前記第1系統及び前記第2系統の少なくとも1つを選択して負圧を発生させる
請求項6に記載のロボットハンド。
【請求項8】
前記付着部は、複数の前記吸着装置を含み、
前記複数の吸着装置は、前記搬送面と交差する方向で前記搬送面に接近する方向及び離れる方向に配列され、
前記搬送面から遠位の前記吸着装置は、前記搬送面から近位の前記吸着装置よりも、前記第1方向に配置される
請求項6または7に記載のロボットハンド。
【請求項9】
前記保持部を、前記搬送面と交差する方向で前記搬送面に接近する方向及び離れる方向に移動させる第3駆動装置をさらに備える
請求項1~8のいずれか一項に記載のロボットハンド。
【請求項10】
前記保持部の指向方向を変える第4駆動装置をさらに備える
請求項1~9のいずれか一項に記載のロボットハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットハンド、ロボット、ロボットシステム及び搬送方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、ワークを搬送するためにロボットが用いられている。例えば、特許文献1は、ワークを吸着することで搬送する複数の吸着アセンブリを備えるロボットハンドを開示している。このロボットハンドは、複数の吸着アセンブリを移動することができるように構成され、それにより、複数の吸着アセンブリ間の距離を変更する。
【先行技術文献】
【特許文献】
【0003】
特開2016-60039号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
近年、物流分野においてロボットを用いた作業の自動化が進められている。例えば、段ボールケースの搬送にロボットが適用される場合がある。コンテナ又はトラックの箱状の荷台のような周囲が囲まれた空間内に、複数の段ボールケースが積み上げられた状態で収容されている場合がある。この場合、ロボットは、段ボールケースに側方からロボットハンドをアプローチさせ引き出し搬送する必要がある。しかしながら、特許文献1のロボットハンドは、このような搬送に適さない。
【0005】
そこで、本開示は、ワーク等の物品に対して側方からアプローチし搬送することを可能にするロボットハンド、ロボット、ロボットシステム及び搬送方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
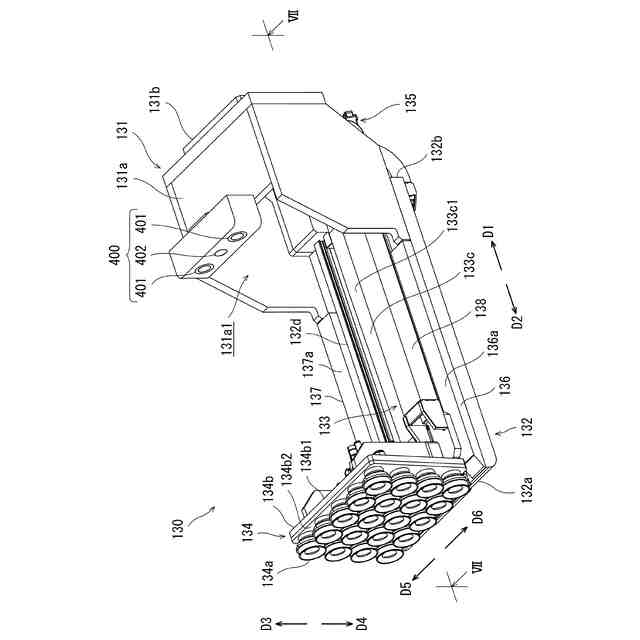
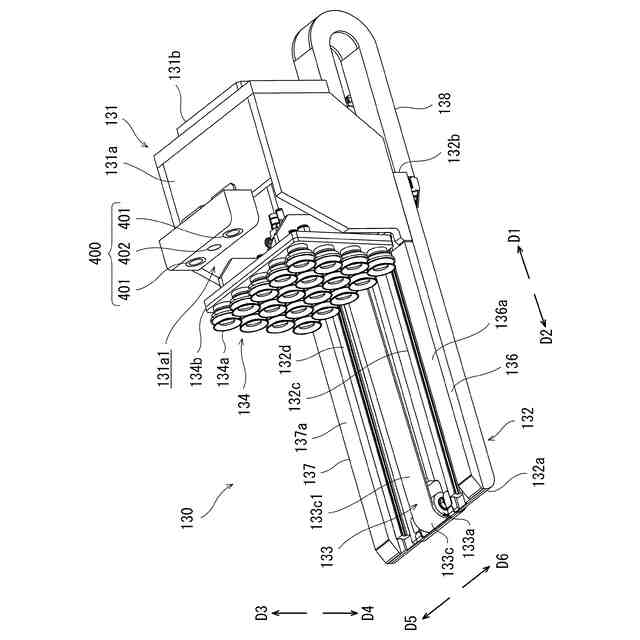
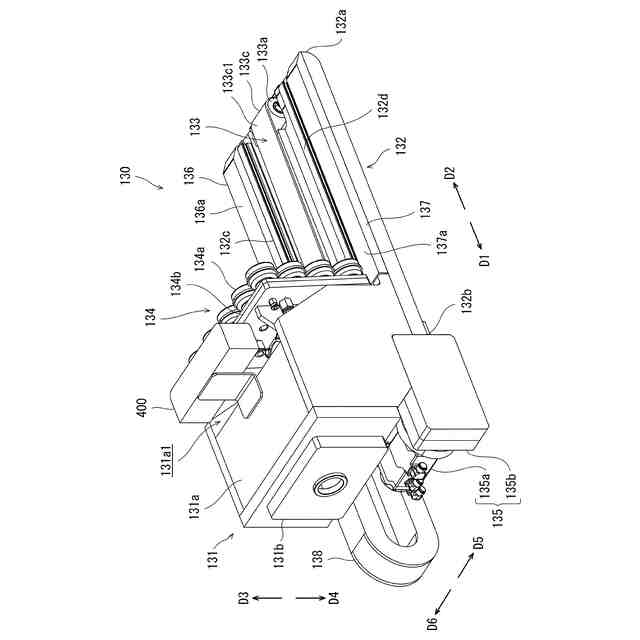
上記目的を達成するために、本開示の一態様に係るロボットハンドは、物品を搬送するロボットハンドであって、前記物品を保持し且つ第1方向に移動する保持部と、前記物品を載せることができる搬送面を有し且つ前記第1方向に前記搬送面を移動させるように駆動する駆動ベルトと、前記駆動ベルトを駆動する第1駆動装置とを備え、前記保持部は、前記第1方向に移動することで、保持している前記物品を前記搬送面上に載せるように構成される。
【0007】
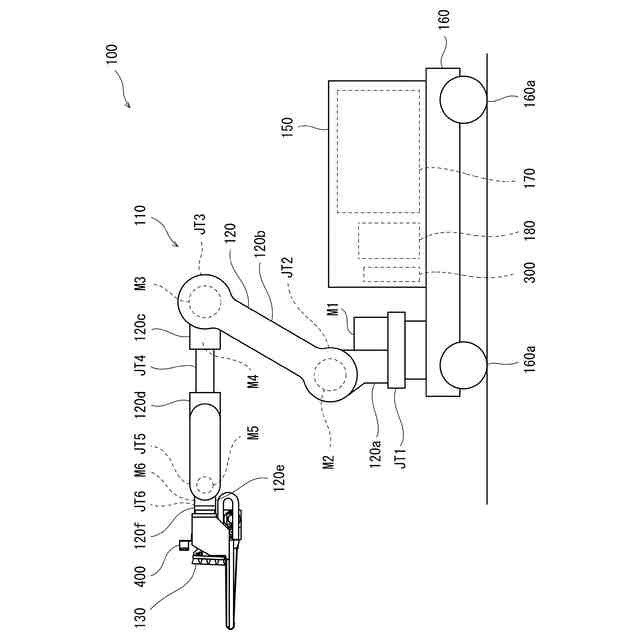
本開示の一態様に係るロボットは、本開示の一態様に係るロボットハンドと、前記ロボットハンドが端部に接続されたロボットアームと、前記ロボットハンドの前記駆動装置の動作と、前記ロボットアームを駆動する第5駆動装置の動作とを制御する制御装置とを備える。
【0008】
本開示の一態様に係るロボットシステムは、本開示の一態様に係るロボットと、前記ロボットによって移送される前記物品を受け取ることができる受付装置とを備え、前記ロボットハンドは、前記物品を載せることができるベースをさらに備え、前記ベースは、前記第1方向と反対方向の端部に少なくとも1つの切り欠き部を有し、前記受付装置は、前記切り欠き部を上下方向に通過することができるように構成される少なくとも1つの突出部を含み、前記ロボットハンドは、前記ロボットアームによって前記受付装置へ向かって下降されることで、前記少なくとも1つの切り欠き部に下方から前記少なくとも1つの突出部を挿入し、前記ベースに載せられた前記物品を前記少なくとも1つの突出部に支持させることができるように構成される。
【0009】
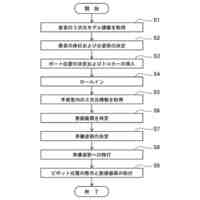
本開示の一態様に係る搬送方法は、本開示の一態様に係るロボットを用いて物品を搬送する搬送方法であって、前記ロボットアームに前記ロボットハンドの前記保持部を前記物品に接近させて、前記保持部に前記物品を保持させ、前記ロボットハンドに、前記物品を保持する前記保持部を前記第1方向に移動させつつ、前記第1方向に前記搬送面を移動させるように前記駆動ベルトを駆動させ、前記物品を前記搬送面の上に移動させる。
【0010】
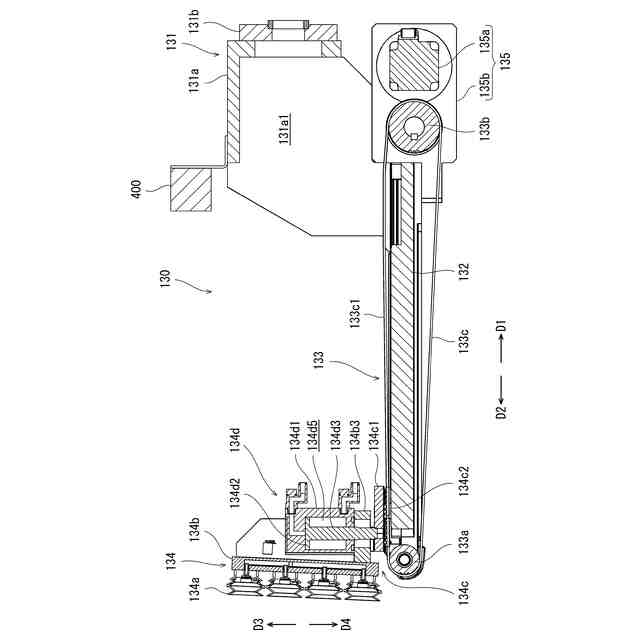
本開示の一態様に係る搬送方法は、本開示の一態様に係るロボットを用いて載置面に載置された物品を搬送する搬送方法であって、前記ロボットハンドは、前記搬送面と交差する方向で前記搬送面に接近する方向及び離れる方向に前記保持部を移動させる第3駆動装置をさらに備え、前記ロボットアームに前記ロボットハンドの姿勢を、前記物品から離れるに従って前記載置面から離れるように前記搬送面が傾斜する第1姿勢にさせ、前記ロボットアームに前記第1姿勢の前記ロボットハンドの前記保持部を前記物品に接近させて、前記保持部に前記物品を保持させ、前記ロボットハンドに、前記物品を保持する前記保持部を前記搬送面から離れる方向に移動させ、前記ロボットハンドに、前記搬送面から離れる方向に移動させた前記保持部を前記第1方向に移動させつつ、前記第1方向に前記搬送面を移動させるように前記駆動ベルトを駆動させ、前記物品を前記搬送面の上に移動させる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
断熱配管
1か月前
川崎重工業株式会社
水中構造体
1か月前
川崎重工業株式会社
液化空気保護装置
2日前
川崎重工業株式会社
遠心式ターボ機械
1か月前
川崎重工業株式会社
バーナおよび燃焼器
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
川崎重工業株式会社
ダイクッション装置
1か月前
川崎重工業株式会社
多段遠心ターボ機械
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
多段ラジアルタービン
23日前
川崎重工業株式会社
ガスタービンエンジン
1か月前
川崎重工業株式会社
航空機の電気機械システム
1か月前
川崎重工業株式会社
支援システムおよび支援方法
1か月前
川崎重工業株式会社
経路作成方法及び経路作成装置
1か月前
川崎重工業株式会社
クローズドインペラの製造方法
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
1か月前
川崎重工業株式会社
アンモニア回収システム及び方法
1か月前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
1か月前
川崎重工業株式会社
情報処理装置および情報提供方法
4日前
横浜ゴム株式会社
多層空洞音響材
23日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1か月前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
1か月前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1か月前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1か月前
川崎重工業株式会社
情報処理装置および情報処理装置の制御方法
2日前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
1か月前
川崎重工業株式会社
ポペット弁装置、及びそれを備える液圧駆動システム
1か月前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
1か月前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1か月前
川崎重工業株式会社
多段遠心圧縮機のケーシング、及び、多段遠心圧縮機
10日前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1か月前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
26日前
川崎重工業株式会社
ワーク搬送ロボットおよびワーク搬送ロボットの制御方法
1か月前
川崎重工業株式会社
ロボット
25日前
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ