TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025164401
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068362
出願日
2024-04-19
発明の名称
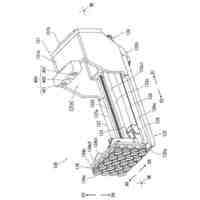
遠心式ターボ機械
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
F04D
29/046 20060101AFI20251023BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】バックツーバック構造において高い軸受性能を得ることができる遠心式ターボ機械を提供する。
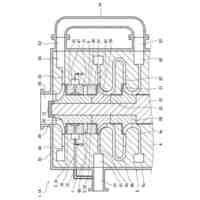
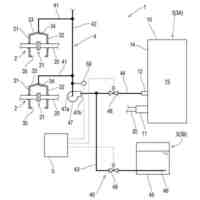
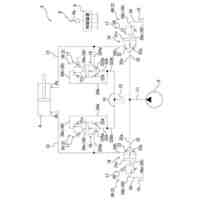
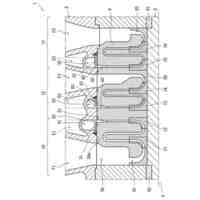
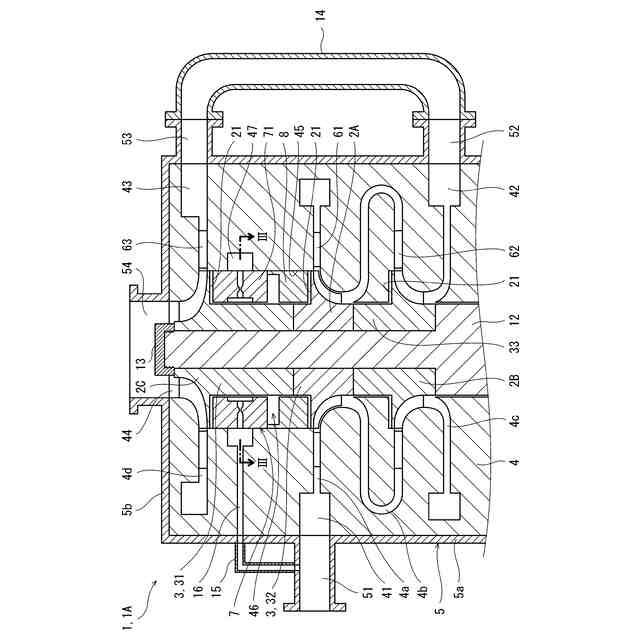
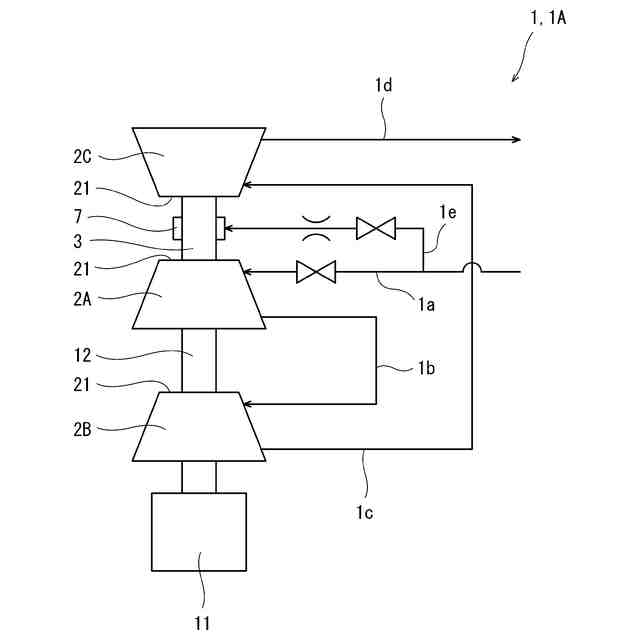
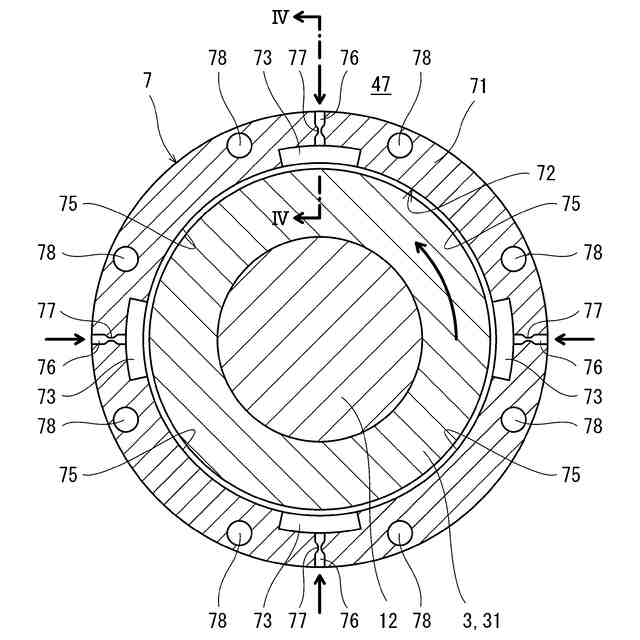
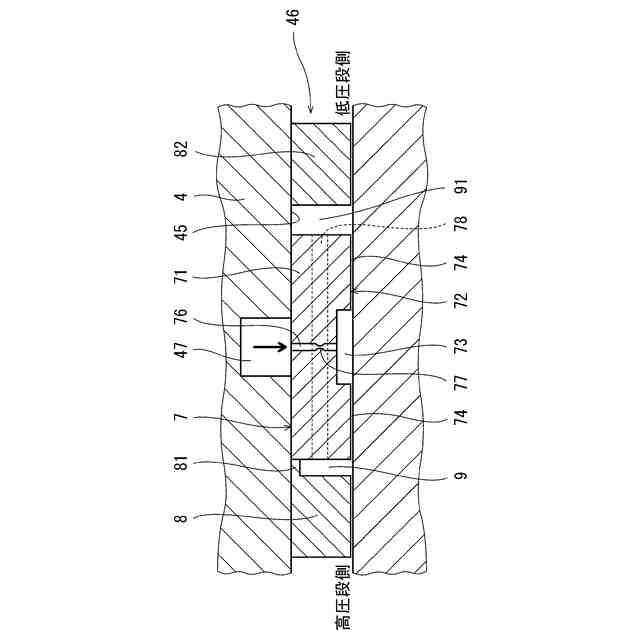
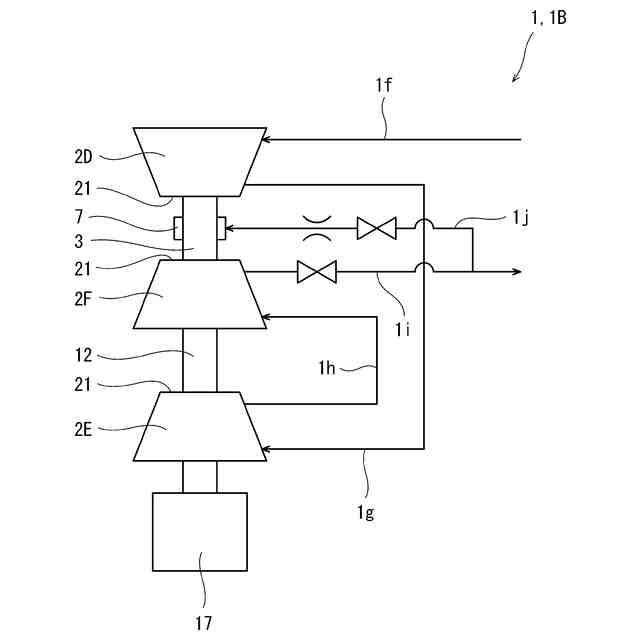
【解決手段】一実施形態に係る遠心式ターボ機械1は、背面21同士が対向する一対の羽根車2A,2Cと、羽根車2A,2Cの間に介在するシャフト部3と、シャフト部3を非接触状態で支持する流体軸受7を含む。流体軸受7は、内周面に周方向に並ぶ複数のポケットが形成された軸受パッド71を含む。さらに、遠心式ターボ機械1は、羽根車2A,2Cのうちの高圧側の羽根車2Aと流体軸受7との間に介在するシール部品8を含む。シール部品8は、軸受パッド71との間にチャンバを形成し、軸受パッド71には、当該軸受パッド71をシャフト部3の軸方向に貫通する少なくとも1つの貫通穴が設けられている。
【選択図】図2
特許請求の範囲
【請求項1】
液体である作動流体用の多段の遠心式ターボ機械であって、
背面同士が対向する一対の羽根車と、
前記一対の羽根車の間に介在するシャフト部と、
前記作動流体が供給されて前記シャフト部を非接触状態で支持する流体軸受であって、内周面に周方向に並ぶ複数のポケットが形成された軸受パッドを含む流体軸受と、
前記一対の羽根車のうちの高圧側の羽根車と前記流体軸受との間に介在し、前記軸受パッドとの間にチャンバを形成するシール部品と、を備え、
前記軸受パッドには、当該軸受パッドを前記シャフト部の軸方向に貫通する少なくとも1つの貫通穴が設けられている、遠心式ターボ機械。
続きを表示(約 650 文字)
【請求項2】
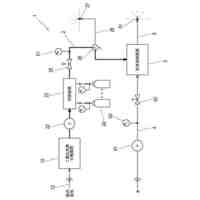
前記遠心式ターボ機械はラジアルタービンであり、
前記一対の羽根車のうちの高圧側の羽根車へ前記作動流体を供給する流入ラインと、
前記流入ラインから分岐して前記流体軸受へつながる分岐ラインと、をさらに備える、請求項1に記載の遠心式ターボ機械。
【請求項3】
前記遠心式ターボ機械は遠心ポンプであり、
前記一対の羽根車のうちの高圧側の羽根車で昇圧された前記作動流体を排出する流出ラインと、
前記流出ラインから分岐して前記流体軸受へつながる分岐ラインと、をさらに備える、請求項1に記載の遠心式ターボ機械。
【請求項4】
前記一対の羽根車の背面および前記シャフト部の外周面と共に軸受室を形成する筒状の支持面を含むハウジングをさらに備え、
前記シール部品は、前記支持面に固定されて、当該シール部品と前記シャフト部の外周面との間をシールする、請求項1乃至3の何れか一項に記載の遠心式ターボ機械。
【請求項5】
前記シール部品は第1シール部品であり、
前記一対の羽根車のうちの低圧側の羽根車と前記流体軸受との間に介在し、前記軸受パッドとの間にチャンバを形成する第2シール部品をさらに備える、請求項1乃至3の何れか一項に記載の遠心式ターボ機械。
【請求項6】
前記作動流体は、液体水素、LNG、液体窒素または液体酸素である、請求項1乃至3の何れか一項に記載の遠心式ターボ機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、多段の遠心式ターボ機械に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
従来から、ラジアルタービンや遠心ポンプなどの、液体である作動流体用の多段の遠心式ターボ機械が知られている。このような遠心式ターボ機械では、回転軸に複数の羽根車が取り付けられる。
【0003】
例えば、特許文献1には、回転軸に複数の羽根車が同じ向きで取り付けられ、前記羽根車と交互に配置された複数の流体軸受によって回転軸が非接触状態で支持された油田用ポンプが開示されている。なお、特許文献1では、流体軸受が「静圧軸受」と呼ばれている。
【0004】
各流体軸受は、回転軸の外周面と対向する内周面を有する環状の軸受パッドを含み、軸受パッドの内周面には周方向に並ぶ複数のポケットが形成されている。つまり、軸受パッドの内周面は、回転軸の軸方向でポケットの両側に位置する一対の軸方向ランド部と、ポケット同士の間の複数の周方向ランド部を含む。
【0005】
また、特許文献1の油田用ポンプでは、隣り合う羽根車の一方から他方へ流路を通じて対象油が導かれるとともに、前記流路から流体軸受のポケットへ対象油が供給される。
【先行技術文献】
【特許文献】
【0006】
特開2020-197142号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
特許文献1の油田用ポンプは低圧の遠心式ターボ機械である。これに対し、高圧の遠心式ターボ機械では、回転軸に作用するスラスト荷重を低減させるために、一部の羽根車が他の羽根車と逆向きとなるバックツーバック(Back-to-Back)構造が採用されることがある。
【0008】
バックツーバック構造において、背面同士が対向する羽根車の間に流体軸受を配置した場合には、一方の軸方向ランド部においてポケット側の流入端とポケットと反対側の流出端との間に十分な差圧が得られず、高い軸受性能を得ることができない。
【0009】
そこで、本開示は、バックツーバック構造において高い軸受性能を得ることができる遠心式ターボ機械を提供することを目的とする。
【課題を解決するための手段】
【0010】
本開示は、液体である作動流体用の多段の遠心式ターボ機械であって、背面同士が対向する一対の羽根車と、前記一対の羽根車の間に介在するシャフト部と、前記作動流体が供給されて前記シャフト部を非接触状態で支持する流体軸受であって、内周面に周方向に並ぶ複数のポケットが形成された軸受パッドを含む流体軸受と、前記一対の羽根車のうちの高圧側の羽根車と前記流体軸受との間に介在し、前記軸受パッドとの間にチャンバを形成するシール部品と、を備え、前記軸受パッドには、当該軸受パッドを前記シャフト部の軸方向に貫通する少なくとも1つの貫通穴が設けられている、遠心式ターボ機械を提供する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水中構造体
1か月前
川崎重工業株式会社
液化空気保護装置
今日
川崎重工業株式会社
遠心式ターボ機械
29日前
川崎重工業株式会社
ダイクッション装置
29日前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
多段遠心ターボ機械
1か月前
川崎重工業株式会社
バーナおよび燃焼器
1か月前
川崎重工業株式会社
ガスタービンエンジン
1か月前
川崎重工業株式会社
多段ラジアルタービン
21日前
川崎重工業株式会社
航空機の電気機械システム
1か月前
川崎重工業株式会社
支援システムおよび支援方法
1か月前
川崎重工業株式会社
クローズドインペラの製造方法
1か月前
川崎重工業株式会社
経路作成方法及び経路作成装置
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
29日前
川崎重工業株式会社
付加製造方法及び付加製造装置
29日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
29日前
川崎重工業株式会社
アンモニア回収システム及び方法
1か月前
川崎重工業株式会社
情報処理装置および情報提供方法
2日前
横浜ゴム株式会社
多層空洞音響材
21日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
29日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1か月前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1か月前
川崎重工業株式会社
情報処理装置および情報処理装置の制御方法
今日
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1か月前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
1か月前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1か月前
川崎重工業株式会社
ポペット弁装置、及びそれを備える液圧駆動システム
1か月前
川崎重工業株式会社
多段遠心圧縮機のケーシング、及び、多段遠心圧縮機
8日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
29日前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
24日前
川崎重工業株式会社
ロボット
23日前
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
29日前
川崎重工業株式会社
モータ制御システム、ロボットシステム、および、モータ制御方法
2日前
川崎重工業株式会社
ロボット移動システム、ロボット移動方法及びロボット移動プログラム
1日前
川崎重工業株式会社
学習済モデルの構築方法
28日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ