TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025154964
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024058281
出願日
2024-03-29
発明の名称
ロボットハンドおよびロボットシステム
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
15/08 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】複数のワークを搬送する場合に作業時間の増大を抑制可能なロボットハンドおよびロボットシステムを提供する。
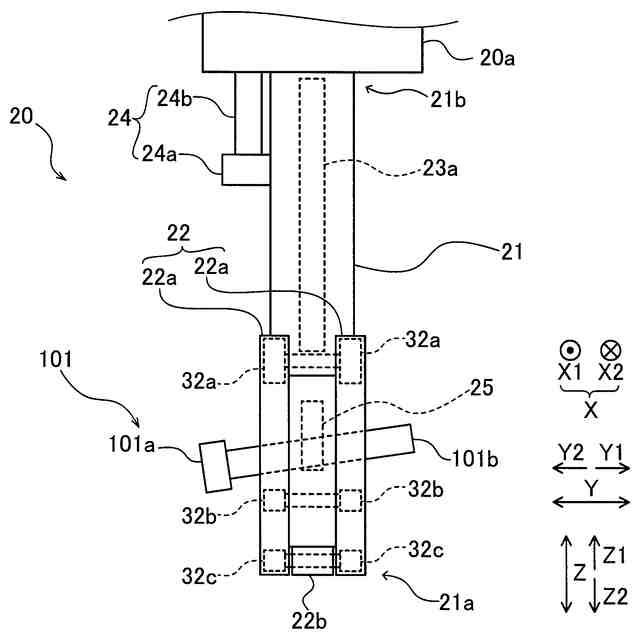
【解決手段】このロボットハンド20は、複数のワークの各々を挟み込んで保持する一対の指部21と、巻上部22と、保持部23とを備えている。巻上部22は、一対の指部21の先端部に配置され、複数のワークの各々を回転駆動により巻き上げる。保持部23は、巻上部22よりも一対の指部21の基端部寄りに配置されており、巻上部22により巻き上げられた複数のワークを押圧することによってまとめて保持する。
【選択図】図3
特許請求の範囲
【請求項1】
複数のワークの各々を挟み込んで保持する一対の指部と、
前記一対の指部の先端部に配置され、前記複数のワークの各々を回転駆動により巻き上げる巻上部と、
前記巻上部よりも前記一対の指部の基端部寄りに配置されており、前記巻上部により巻き上げられた前記複数のワークを押圧することによってまとめて保持する保持部と、を備える、ロボットハンド。
続きを表示(約 1,000 文字)
【請求項2】
前記保持部は、前記巻上部により巻き上げられた前記複数のワークを、前記一対の指部の間において前記先端部から前記基端部に向かって並べた状態で保持する、請求項1に記載のロボットハンド。
【請求項3】
前記保持部は、弾性力により前記複数のワークを押圧する弾性部材を含む、請求項1または2に記載のロボットハンド。
【請求項4】
前記弾性部材は、互いに対向した状態で前記一対の指部の各々に配置されている一対の前記弾性部材を含み、
前記一対の弾性部材は、前記一対の指部同士が対向する方向に沿って、前記複数のワークを弾性力により押圧する、請求項3に記載のロボットハンド。
【請求項5】
前記弾性部材は、たわみ変形することによって前記複数のワークを弾性力により押圧する板ばねを含む、請求項3に記載のロボットハンド。
【請求項6】
前記巻上部は、前記一対の指部の少なくとも一方において互いに離間した状態で配置された一対のベルト部材を含み、
前記一対のベルト部材は、互いに平行な方向に沿って前記基端部に向かって前記複数のワークの各々を巻き上げる、請求項3に記載のロボットハンド。
【請求項7】
前記弾性部材は、前記一対のベルト部材から前記基端部に向かって前記一対の指部に沿って配置されており、前記先端部寄りの端部が前記一対のベルト部材の間に配置されている、請求項6に記載のロボットハンド。
【請求項8】
前記保持部により保持されている前記複数のワークを、前記基端部から前記先端部に向かって押圧する押圧部をさらに備える、請求項1または2に記載のロボットハンド。
【請求項9】
前記一対の指部を、少なくとも互いに対向する閉方向に向かって弾性力により付勢する付勢部をさらに備え、
前記一対の指部は、前記複数のワークの各々を挟み込んで保持する場合に、挟み込まれた前記複数のワークにより前記付勢部による弾性力に抗しながら互いに離間する開方向に広げられる、請求項1または2に記載のロボットハンド。
【請求項10】
前記一対の指部に保持された前記複数のワークの各々を検出するセンサ部をさらに備える、請求項1または2に記載のロボットハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、ロボットハンドおよびロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、ロボットシステムが開示されている。特許文献1には、バラ積みされたワークを1つずつ保持するロボットシステムが開示されている。このロボットシステムは、2つの指部を有するハンドによりバラ積みされたワークを1つずつ取り出し、所定の場所に搬送する。
【先行技術文献】
【特許文献】
【0003】
特開2014-24143号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記特許文献1に記載のロボットシステムのようにワークを1つずつ保持するロボットハンドを用いて複数のワークを搬送する場合には、ワークを保持する動作、保持したワークを移動させる動作、および、移動後に保持したワークを載置する動作を含む1連の搬送動作が、複数のワークの各々ごとに1つずつ順に行われる。そのため、複数のワークを1つずつ順に搬送することに起因して、複数のワークの搬送に要する作業時間が増大する。そこで、複数のワークを搬送する場合に作業時間の増大を抑制することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、複数のワークを搬送する場合に作業時間の増大を抑制可能なロボットハンドおよびロボットシステムを提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面によるロボットハンドは、複数のワークの各々を挟み込んで保持する一対の指部と、一対の指部の先端部に配置され、複数のワークの各々を回転駆動により巻き上げる巻上部と、巻上部よりも一対の指部の基端部寄りに配置されており、巻上部により巻き上げられた複数のワークを押圧することによってまとめて保持する保持部と、を備える。
【0007】
この開示の第1の局面によるロボットハンドは、上記のように、巻上部よりも一対の指部の基端部寄りに配置されており、巻上部により巻き上げられた複数のワークを押圧することによってまとめて保持する保持部を備える。これにより、保持部により複数のワークをまとめて保持できるので、ロボットハンドにおいて複数のワークをまとめて保持できる。そのため、ロボットハンドにおいてワークを1つずつ保持する場合に比べて、複数のワークの搬送に要する作業時間を短縮できる。その結果、複数のワークを搬送する場合に作業時間の増大を抑制できる。
【0008】
この開示の第2の局面によるロボットシステムは、複数のワークの各々を挟み込んで保持する一対の指部と、一対の指部の先端部に配置され、複数のワークの各々を回転駆動により巻き上げる巻上部と、巻上部よりも一対の指部の基端部寄りに配置されており、巻上部により巻き上げられた複数のワークを押圧することによってまとめて保持する保持部と、を含むロボットハンドと、ロボットハンドが取り付けられるロボットアーム部と、ロボットハンドおよびロボットアーム部の動作を制御する制御部と、を備える。
【0009】
この開示の第2の局面によるロボットシステムは、上記のように、巻上部よりも一対の指部の基端部寄りに配置されており、巻上部により巻き上げられた複数のワークを押圧することによってまとめて保持する保持部を含むロボットハンドを備えている。これにより、保持部により複数のワークをまとめて保持できるので、ロボットハンドにおいて複数のワークをまとめて保持できる。そのため、ロボットハンドにおいてワークを1つずつ保持する場合に比べて、複数のワークの搬送に要する作業時間を短縮できる。その結果、複数のワークを搬送する場合に作業時間の増大を抑制可能なロボットシステムを提供できる。
【発明の効果】
【0010】
本開示のロボットハンドおよびロボットシステムは、複数のワークを搬送する場合に作業時間の増大を抑制できる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
ミルウォーキー エレクトリック ツール コーポレイション
誘導センサを用いてアンビル位置を検出するためのシステム及び方法
今日
他の特許を見る










 特許ウォッチ
特許ウォッチ