TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025172785
公報種別
公開特許公報(A)
公開日
2025-11-26
出願番号
2025137482,2024177754
出願日
2025-08-21,2021-06-04
発明の名称
誘導センサを用いてアンビル位置を検出するためのシステム及び方法
出願人
ミルウォーキー エレクトリック ツール コーポレイション
代理人
弁理士法人ITOH
主分類
B25B
21/02 20060101AFI20251118BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】インパクト機構を備えた電動工具に関する。
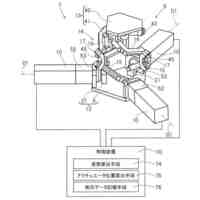
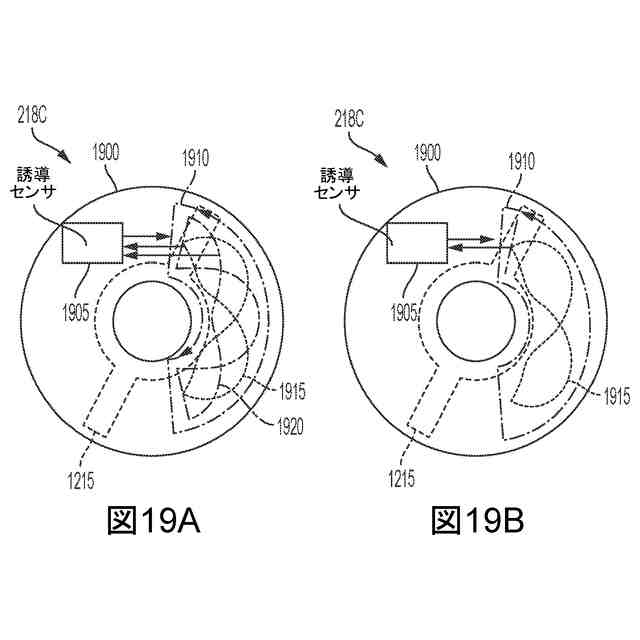
【解決手段】電動工具が、ハウジングと、ブラシレス直流(DC)モータと、ハンマー及びアンビルを備えるインパクト機構と、出力駆動装置と、位置センサ218Cと、コントローラとを備える。電動工具はまた、シャフト上に配置されたターゲットと、シャフト上でターゲットとアンビルとの間に配置された磁気シールドと、位置センサ218Cとを備える。位置センサ218Cは、誘導センサ1905と、第1の送信回路トレース1910と、第1の受信回路トレース1915とを備える。コントローラは、アンビルの求められた位置に基づいて駆動角度を計算し、アンビルの駆動角度に基づいてブラシレスDCモータを制御するように構成される。
【選択図】図19AB
特許請求の範囲
【請求項1】
ハウジングと、
前記ハウジング内のブラシレス直流(DC)モータであって、回転子と、固定子とを含み、前記回転子は、回転出力を生成するためにモータシャフトに結合される、前記ブラシレスDCモータと、
インパクト機構であって、
前記モータシャフトに結合されるハンマーと、
前記ハンマーからインパクトを受けるように構成されるアンビルラグを含むアンビルとを含む、
前記インパクト機構と、
前記アンビルに結合されるシャフトを含み、タスクを行うために回転するように構成される、出力駆動装置と、
位置センサであって、
前記アンビルラグに近接して位置決めされる誘導センサと、
第1の送信回路トレースと、
第1の受信回路トレースであって、前記誘導センサは、前記第1の送信回路トレース上に信号を注入し、前記第1の受信回路トレース上で第1の出力信号を検出して、前記アンビルの位置を決定する、前記第1の受信回路トレースとを含む、
前記位置センサと、
前記位置センサに接続されるコントローラとを含み、前記コントローラは、前記アンビルの前記位置に基づいて前記ブラシレスDCモータを制御するように構成される、
電動工具。
続きを表示(約 1,800 文字)
【請求項2】
前記コントローラは、
前記第1の出力信号に基づいて前記ハンマーと前記アンビルとの間の第1のインパクト後の前記アンビルの第1の回転位置を決定し、
前記第1の出力信号に基づいて前記ハンマーと前記アンビルとの間の第2のインパクト後の前記アンビルの第2の回転位置を決定し、
前記第1の回転位置と前記第2の回転位置とに基づいて前記出力駆動装置が受ける駆動角度を決定する、
ようにさらに構成される、
請求項1に記載の電動工具。
【請求項3】
前記第1の回転位置と前記第2の回転位置とに基づいて前記出力駆動装置が受ける前記駆動角度を決定するために、前記コントローラは、
前記第2の回転位置と前記第1の回転位置との間の差を決定し、
前記第2の回転位置と前記第1の回転位置との間の前記差から所定の角度を減じ、
前記所定の角度を減じた前記第2の回転位置と前記第1の回転位置との間の前記差に基づいて前記出力駆動装置が受ける前記駆動角度を決定する、
ように構成される、
請求項2に記載の電動工具。
【請求項4】
前記コントローラは、
前記出力駆動装置が受ける前記駆動角度に基づいて前記ブラシレスDCモータの速度を調整することによって前記出力駆動装置が受ける前記駆動角度に基づいて前記ブラシレスDCモータを制御する、
ように構成される、
請求項2に記載の電動工具。
【請求項5】
前記コントローラは、
前記アンビルの複数の計算された駆動角度のうちの駆動角度閾値より下の前記アンビルの計算された駆動角度についての値を累積させることによって回転カウントを決定し、
前記回転カウントが回転閾値よりも大きいと決定することに応答して前記ブラシレスDCモータの速度を減少させる、
ようにさらに構成される、
請求項1に記載の電動工具。
【請求項6】
前記コントローラに結合される送受信機をさらに含み、
前記コントローラは、前記送受信機を介して外部装置から無線で前記回転閾値を受信するように構成される、
請求項5に記載の電動工具。
【請求項7】
前記コントローラは、
前記アンビルの駆動角度が駆動角度閾値未満であるかどうかを決定し、
前記アンビルの前記駆動角度が前記駆動角度閾値未満であると決定することに応答して前記ブラシレスDCモータの速度を減少させる、
ようにさらに構成される、
請求項1に記載の電動工具。
【請求項8】
前記コントローラは、
前記アンビルの駆動角度が駆動角度閾値未満であるかどうかを決定し、
前記アンビルの前記駆動角度が前記駆動角度閾値未満であると決定することに応答して検出されるインパクトについてインパクトカウンタを増分し、
前記インパクトカウンタがインパクトカウンタ閾値に達したかどうかを決定し、
前記インパクトカウンタが前記インパクトカウンタ閾値に達したと決定することに応答して前記ブラシレスDCモータの速度を減少させる、
ようにさらに構成される、
請求項1に記載の電動工具。
【請求項9】
前記コントローラに接続される送受信機をさらに含み、
前記コントローラは、前記送受信機を介して外部装置から無線で仕上げ速度を受信するように構成され、
前記コントローラは、前記インパクトカウンタが前記インパクトカウンタ閾値に達したと決定することに応答して前記ブラシレスDCモータの前記速度を減少させるために、前記ブラシレスDCモータの前記速度を第1の速度から前記仕上げ速度に減少させるように構成される、
請求項8に記載の電動工具。
【請求項10】
前記位置センサは、第2の受信回路トレースをさらに含み、
前記誘導センサは、
前記第2の受信回路トレース上の第2の出力信号を検出し、
前記第1の出力信号と前記第2の出力信号とに基づいて前記アンビルの前記位置を決定する、
ように構成される、
請求項1に記載の電動工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
(関連出願の参照)
本願は、2020年6月4日出願の米国仮特許出願第63/034,727号明細書及び2020年12月15日出願の米国仮特許出願第63/125,705号明細書の利益を主張するものであり、これら双方の米国仮特許出願の内容全体が参照により本明細書中に組み込まれる。
続きを表示(約 3,600 文字)
【0002】
(技術分野)
本明細書で説明される実施形態は、インパクト機構を備えた電動工具に関する。
【発明の概要】
【0003】
本明細書で説明される電動工具は、ハウジングと、ブラシレス直流(DC)モータと、インパクト機構と、出力駆動装置と、位置センサと、コントローラとを備える。ブラシレスDCモータはハウジング内にある。ブラシレスDCモータは、回転子と固定子とを備える。回転子は、回転出力を発生させるためにモータシャフトに結合される。インパクト機構は、モータシャフトに結合されたハンマーと、ハンマーからのインパクトを受けるように構成されたアンビルとを備える。出力駆動装置は、アンビルに結合され、タスクを行うために回転するように構成される。位置センサは、誘導センサと、第1の送信回路トレースと、第1の受信回路トレースとを備える。誘導センサは、送信回路トレース上で信号を注入し、第1の受信回路トレース上で第1の出力信号を検出して、アンビルの位置を求めるように構成される。コントローラは、位置センサに結合され、第1の出力信号に基づいてインパクトによって生じたアンビルの駆動角度を計算し、アンビルの駆動角度に基づいてブラシレスDCモータを制御するように構成される。
【0004】
本明細書で説明される方法は、ブラシレス直流(DC)モータを駆動することを含む。ブラシレスDCモータは、回転子と固定子とを備える。回転子は、回転出力を発生させるためにモータシャフトに結合される。本方法はまた、インパクト機構のアンビルに結合された出力駆動装置を回転させるために、モータシャフトに結合されたインパクト機構のハンマーによってインパクト機構のアンビルにインパクト印加することを含む。本方法はまた、位置センサによってアンビルの位置を検知することを含む。位置センサは、第1の送信回路トレースと、第1の受信回路トレースとを備える。検知することは、送信回路トレース上で信号を注入することと、第1の受信回路トレース上で第1の出力信号を検出することと、第1の出力信号に基づいてアンビルの位置を求めることとを含む。本方法はまた、アンビルの位置に基づいてアンビルの駆動角度を計算することと、駆動角度に基づいてブラシレスDCモータを制御することとを含む。
【0005】
本明細書で説明される電動工具は、ハウジングと、ブラシレス直流(DC)モータと、インパクト機構と、出力駆動装置と、ターゲットと、磁気シールドと、位置センサと、コントローラとを備える。ブラシレスDCモータはハウジング内にある。ブラシレスDCモータは、回転子と固定子とを備える。回転子は、回転出力を発生させるためにモータシャフトに結合される。インパクト機構は、モータシャフトに結合されたハンマーと、ハンマーからのインパクトを受けるように構成されたアンビルとを備える。出力駆動装置は、アンビルに結合され、タスクを行うために回転するように構成されたシャフトを備える。ターゲットは、シャフト上に配置される。磁気シールドは、シャフト上でターゲットとアンビルとの間に配置される。位置センサは、ターゲットに近接して配置された誘導センサと、第1の送信回路トレースと、第1の受信回路トレースとを備える。誘導センサは、第1の送信回路トレース上で信号を注入し、第1の受信回路トレース上で第1の出力信号を検出して、アンビルの位置を求めるように構成される。コントローラは、位置センサに結合され、アンビルの求められた位置に基づいてインパクトによって生じたアンビルの駆動角度を計算し、アンビルの駆動角度に基づいてブラシレスDCモータを制御するように構成される。
【0006】
本明細書で説明される方法は、ブラシレス直流(DC)モータを駆動することを含む。ブラシレスDCモータは、回転子と固定子とを備える。回転子は、回転出力を発生させるためにモータシャフトに結合される。本方法はまた、インパクト機構のアンビルに結合されたシャフトを備える出力駆動装置を回転させるために、モータシャフトに結合されたインパクト機構のハンマーによってインパクト機構のアンビルにインパクト印加することと、シャフト上に配置されたターゲットに近接して配置された位置センサによってアンビルの位置を検知することとを含む。磁気シールドが、シャフト上でターゲットとアンビルとの間に配置される。位置センサは、第1の送信回路トレースと、第1の受信回路トレースとを備える。検知することは、第1の送信回路トレース上で信号を注入することと、第1の受信回路トレース上で第1の出力信号を検出することと、第1の出力信号に基づいてアンビルの位置を求めることとを含む。本方法はまた、アンビルの位置に基づいてアンビルの駆動角度を計算することと、アンビルの駆動角度に基づいてブラシレスDCモータを制御することとを含む。
【0007】
本明細書で説明されるインパクト電動工具は、ハウジングと、ブラシレス直流(DC)モータと、インパクト機構と、出力駆動装置と、ターゲットと、位置センサと、コントローラとを備える。ブラシレスDCモータはハウジング内にある。ブラシレスDCモータは、回転子と固定子とを備える。回転子は、回転出力を発生させるためにモータシャフトに結合される。インパクト機構は、モータシャフトに接続されたハンマーと、ハンマーからのインパクトを受けるように構成されたアンビルとを備える。出力駆動装置は、アンビルに結合され、タスクを行うために回転するように構成されたシャフトを備える。ターゲットは、シャフト上に配置される。位置センサは、ターゲットに近接して配置された誘導センサと、第1の送信回路トレースと、第1の受信回路トレースとを備える。誘導センサは、第1の送信回路トレース上で信号を注入し、第1の受信回路トレース上で第1の出力信号を検出するように構成される。コントローラは、位置センサに結合され、位置センサから、第1の時間に位置センサからの第1の位置信号を受信し、第2の時間に位置センサからの第2の位置信号を受信し、第1の位置信号及び第2の位置信号に基づいてアンビルの駆動角度を計算し、アンビルの駆動角度に基づいてブラシレスDCモータを制御するように構成される。
【0008】
本発明の実施形態を詳細に説明する前に、本発明は、以下の説明に記載されているか、又は以下の図面に図示している構造の詳細及びコンポーネントの配置に本発明の用途を限定されないことを理解されたい。本発明は、他の実施形態が可能であり、様々なやり方で実践すること、又は行うことが可能である。また、本明細書において用いられる語法及び専門用語は説明を目的としたものであり、限定と見なされるべきではないことを理解されたい。本明細書における「含む(including)」、「含む(comprising)」又は「有する(having)」及びそれらの変形の使用は、その後に列挙されている項目及びそれらの均等物、並びに追加の項目を包含することを意図する。「装着された(mounted)」、「接続された(connected)」及び「結合された(coupled)」という用語は、広義に用いられ、直接的な装着、接続、結合、及び間接的な装着、接続、結合の両方を包含している。更に、「接続された」及び「結合された」は、物理的又は機械的な接続又は結合に限定されず、直接的又は間接的にかかわらず、電気的な接続又は結合を含むことができる。
【0009】
複数のハードウェア及びソフトウェアベースの装置、並びに複数の異なる構造上の構成要素を利用して、本発明を実施し得ることに留意されたい。更に、後段で説明するように、図面に示されている具体的な構成は、本発明の実施形態を例示することを意図しており、他の代替的な構成が可能であることを意図している。「プロセッサ」「中央処理装置」及び「CPU」という用語は、特に記載のない限り、同じ意味で使用されている。「プロセッサ」又は「中央処理装置」若しくは「CPU」という用語が、特定の機能を実行するユニットを識別するものとして用いられる場合、特に記載のない限り、これらの機能は、単一のプロセッサ、又は並列プロセッサ、直列プロセッサ、タンデムプロセッサ若しくはクラウド処理/クラウドコンピューティング構成を含む任意の形態で配置された複数のプロセッサによって行うことが可能であることを理解されたい。
【0010】
様々な実施形態の他の態様は、詳細な説明及び添付の図面を検討すれば明らかになるはずである。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
フラワーホッチキス。
1か月前
個人
手持ち挟持具
21日前
トヨタ自動車株式会社
学習装置
6日前
川崎重工業株式会社
ハンド
1か月前
株式会社マキタ
ハンマドリル
1か月前
株式会社マキタ
ハンマドリル
1か月前
トヨタ自動車株式会社
ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社安川電機
ロボット
27日前
川崎重工業株式会社
塗装システム
1か月前
株式会社三共コーポレーション
工具保持具
21日前
株式会社不二越
垂直多関節ロボット
6日前
トヨタ自動車株式会社
軌道生成装置
1か月前
工機ホールディングス株式会社
作業機
1か月前
トヨタ自動車株式会社
ロボットハンド
27日前
株式会社マキタ
現場用作業機
1か月前
株式会社不二越
ロボットに用いる伝送路
1か月前
株式会社マキタ
回転打撃工具
1か月前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
山九株式会社
レンチ保持治具
1か月前
学校法人立命館
ロボットハンド制御システム
1か月前
株式会社マキタ
作業機
1か月前
株式会社マキタ
電動工具
6日前
ニデックインスツルメンツ株式会社
産業用ロボット
19日前
トヨタ自動車株式会社
モバイルマニピュレータ
1か月前
東レエンジニアリング株式会社
ツール動作機構
1か月前
株式会社田村製作所
エンドエフェクタ及びロボット装置
19日前
株式会社ケイズベルテック
物品定量取り分け装置
1か月前
株式会社人機一体
有脚ロボット
29日前
川崎重工業株式会社
監視システム
1か月前
ファナック株式会社
経路データセット生成
29日前
株式会社ダイヘン
回生ユニット
1か月前
株式会社マキタ
インパクト工具
1か月前
NTN株式会社
リンク作動装置
1か月前
積水ハウス株式会社
固定ピン保持用アタッチメント
27日前
株式会社秦製作所
ジャック差込口ナット締め用の供回り防止レンチ
7日前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ