TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150797
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051891
出願日
2024-03-27
発明の名称
監視システム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
19/06 20060101AFI20251002BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】モータの負荷が変化する原因を把握しやすくする。
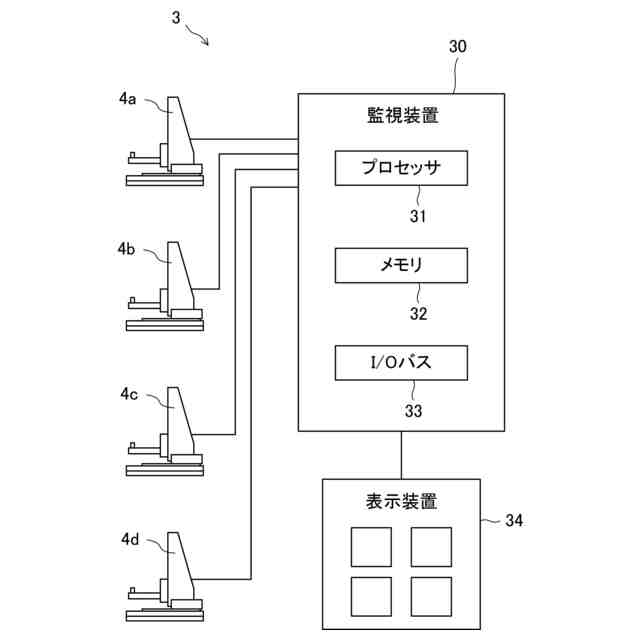
【解決手段】監視システム3は、モータ(第3モータ48)により移動するアーム41を有し、作業エリア13に搬送されたワーク(ボデー11)を互いに異なる位置で位置合わせする複数のロケータ4と、モータに供給される電流値と、ロケータ4毎に設定されかつ電流値と関連する代表値とを比較した比較値をロケータ4毎に算出する監視装置30と、を備える
【選択図】図5
特許請求の範囲
【請求項1】
モータにより移動するアームを有し、作業エリアに搬送されたワークを互いに異なる位置で位置合わせする複数のロケータと、
前記モータに供給される電流値と、前記ロケータ毎に設定されかつ前記電流値と関連する代表値とを比較した比較値を前記ロケータ毎に算出する監視装置と、を備える監視システム。
続きを表示(約 620 文字)
【請求項2】
請求項1に記載の監視システムにおいて、
前記代表値は、マスターワークを位置合わせしたときの前記電流値である監視システム。
【請求項3】
請求項1に記載の監視システムにおいて、
前記代表値は、同一型の前記ワークを複数台位置合わせしたときの前記電流値の平均値である監視システム。
【請求項4】
請求項1に記載の監視システムにおいて、
前記代表値は、同じタイミングで供給された前記電流値から選択された1つの電流値である監視システム。
【請求項5】
請求項1~4のいずれか1つに記載の監視システムにおいて、
前記アームは、前記ワークを下側から支持し、
前記モータは、前記アームを上下方向に移動させ、
前記監視装置は、前記アームが前記ワークを支持したときに前記電流値を取得する監視システム。
【請求項6】
請求項5に記載の監視システムにおいて、
前記ロケータは、搬送車によって前記作業エリアに搬送される前記ワークを、ロボットが前記ワークに対して作業している最中に支持する監視システム。
【請求項7】
請求項1~4のいずれか1つに記載の監視システムにおいて、
前記監視装置が算出した前記比較値を、複数の前記ロケータの配置と同じ配置で、前記ロケータ毎に表示する表示装置を更に備える監視システム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、監視システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
特許文献1は、車体の組立ラインを開示する。特許文献1に記載の組立ラインは、アンダーボディーを位置決めする複数の多軸ロボットと、組付エリアにアンダーボディーを搬入するAGVと、を備える。各多軸ロボットは、アンダーボディーを下から持ち上げて所定の高さで保持する。
【先行技術文献】
【特許文献】
【0003】
特許第6887738号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
モータ駆動するロボットでは、モータにかかる負荷を取得することは、モータの動作状態を把握する上で有効である。しかし、特許文献1のように、複数のロボットによりワークを支持する場合、ワークの形状又はワークの姿勢に依存して、各ロボットにかかる負荷が変化する。ロボット毎に独立してモータの負荷を取得するだけでは、モータの負荷が変化する原因を把握するのが困難である。
【課題を解決するための手段】
【0005】
ここに開示する技術は、監視システムに関する。監視システムは、モータにより移動するアームを有し、作業エリアに搬送されたワークを互いに異なる位置で位置合わせする複数のロケータと、前記モータに供給される電流値と、前記ロケータ毎に設定されかつ前記電流値と関連する代表値とを比較した比較値を前記ロケータ毎に算出する監視装置と、を備える。
【発明の効果】
【0006】
モータに供給される電流値は、モータの負荷を反映したものである。前記監視システムによれば、電流値の比較値をロケータ毎に算出することで、モータの負荷が変化する原因が把握しやすくなる。
【図面の簡単な説明】
【0007】
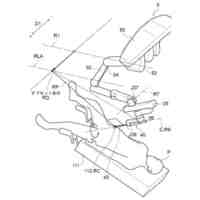
図1は、自動車の製造ラインに適用されたロボットシステムを示す。
図2は、ロボットシステムを示す。
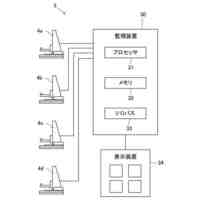
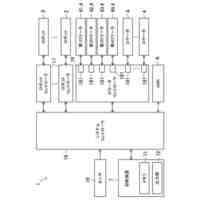
図3は、ロボットシステムのブロック図である。
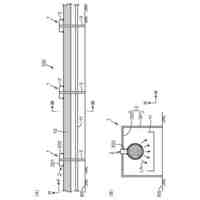
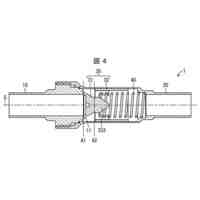
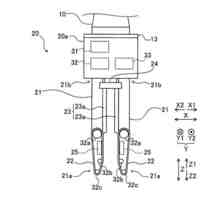
図4は、ロケータの概略図である。
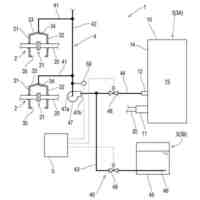
図5は、監視システムの概略図である。
図6は、表示装置の画面を示す概略図である。
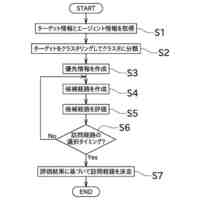
図7は、監視システムにより、代表値を取得する処理を示すフローチャートである。
図8は、監視システムにより、比較値を監視する処理を示すフローチャートである。
図9は、変形例1に係る監視システムにより、比較値を監視する処理を示すフローチャートである。
図10は、変形例2に係る監視システムにより、比較値を監視する処理を示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、監視システムの実施形態について、図面を参照しながら説明する。ここで説明する監視システムは例示である。
【0009】
(ロボットシステムの全体構造)
図1は、監視システムが適用されるロボットシステム1を斜め上方から見た斜視図である。図2は、ロボットシステム1を後方から見た背面図である。ロボットシステム1は、自動車の工場における製造ライン10に適用されている。図例の製造ライン10では、自動車のボデー11に対する溶接、より詳細には、スポット溶接が行われる。ボデー11はワークの一例である。
【0010】
ロボットシステム1における、前Fr、後Rr、右Rt、左Lt、上Up、及び、下Lwを、ロボットシステム1の作業対象のボデー11を基準にして、以下のように定義する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
28日前
川崎重工業株式会社
断熱配管
28日前
川崎重工業株式会社
水中構造体
9日前
川崎重工業株式会社
塗装システム
28日前
川崎重工業株式会社
監視システム
29日前
川崎重工業株式会社
配管の支持構造
29日前
川崎重工業株式会社
ロボットシステム
29日前
川崎重工業株式会社
ロボットシステム
29日前
川崎重工業株式会社
遠心式ターボ機械
8日前
川崎重工業株式会社
バーナおよび燃焼器
9日前
川崎重工業株式会社
多段遠心ターボ機械
14日前
川崎重工業株式会社
ワーク搬送ロボット
28日前
川崎重工業株式会社
ダイクッション装置
8日前
川崎重工業株式会社
廃棄物処理システム
21日前
川崎重工業株式会社
ガスタービンエンジン
10日前
川崎重工業株式会社
極低温流体用配管設備
1か月前
川崎重工業株式会社
多段ラジアルタービン
今日
川崎重工業株式会社
ロボットの診断システム
29日前
川崎重工業株式会社
航空機の電気機械システム
10日前
株式会社キッツ
逆流防止弁
29日前
川崎重工業株式会社
支援システムおよび支援方法
28日前
川崎重工業株式会社
付加製造方法及び付加製造装置
8日前
川崎重工業株式会社
クローズドインペラの製造方法
11日前
川崎重工業株式会社
経路作成方法及び経路作成装置
28日前
川崎重工業株式会社
付加製造方法及び付加製造装置
8日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
8日前
川崎重工業株式会社
アンモニア回収システム及び方法
28日前
横浜ゴム株式会社
多層空洞音響材
今日
川崎重工業株式会社
配管の接続構造および配管システム
1か月前
川崎重工業株式会社
ロボットシステム及びその動作方法
1か月前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
8日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
28日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
28日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
28日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
28日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
28日前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ