TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025150812
公報種別
公開特許公報(A)
公開日
2025-10-09
出願番号
2024051918
出願日
2024-03-27
発明の名称
ロボットシステム
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B62D
65/18 20060101AFI20251002BHJP(鉄道以外の路面車両)
要約
【課題】ワークの撓みに起因してモータにかかる負荷を小さくする。
【解決手段】ロボットシステム1は、ワーク(ボデー11)を持ち上げて支持するロッド41と、第1モータ46により作動しかつ水平面内の第1方向にロッド41を移動させる第1ステージ43と、第2モータ47により作動しかつ水平面内の第2方向にロッド41を移動させる第2ステージ44とを含む複数のロケータ4と、ロッド41がワークを支持した状態で所定条件が満たされるときには、第1モータ46に供給可能な最大電流値及び第2モータ47に供給可能な最大電流値の少なくとも一方を、予め設定された値から低くする電流抑制制御を実行するコントローラ(システムコントローラ16)と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
水平面内の第1方向又は前記第1方向と交差する第2方向に離間して配置された複数のロケータであって、作業エリアに搬送されたワークを持ち上げて支持するロッドと、第1モータにより作動しかつ前記第1方向に前記ロッドを移動させる第1ステージと、第2モータにより作動しかつ水平面内で前記第2方向に前記ロッドを移動させる第2ステージとを含む複数のロケータと、
前記第1モータ及び前記第2モータに供給する電流値を制御するコントローラであって、前記ロッドが前記ワークを支持した状態で、前記第1モータ及び前記第2モータの負荷に関する所定条件が満たされるときには、前記第1モータに供給可能な第1最大電流値及び前記第2モータに供給可能な第2最大電流値の少なくとも一方を、予め設定された値から低くする電流抑制制御を実行するコントローラと、を備えるロボットシステム。
続きを表示(約 760 文字)
【請求項2】
請求項1に記載のロボットシステムにおいて、
前記第1モータに供給される電流を検出する第1センサと、
前記第2モータに供給される電流を検出する第2センサと、を備え、
前記所定条件は、前記ロッドが前記ワークを支持した状態で、前記第1モータに供給すべき電流値が第1閾値以上であるか、又は前記第2モータに供給すべき電流値が第2閾値以上であるという条件であるロボットシステム。
【請求項3】
請求項2に記載のロボットシステムにおいて、
前記コントローラは、前記電流抑制制御において、前記第1最大電流値を第1閾値未満に設定し、前記第2最大電流値を第2閾値未満に設定するロボットシステム。
【請求項4】
請求項3に記載のロボットシステムにおいて、
前記コントローラは、前記ロッドが前記ワークを支持してから所定時間が経過した後の前記第1センサの検出結果及び前記所定時間が経過した後の前記第2センサの検出結果に基づいて前記電流抑制制御を実行するロボットシステム。
【請求項5】
請求項2~4のいずれか1つに記載のロボットシステムにおいて、
前記コントローラは、前記電流抑制制御において、複数の前記ロケータに対して1つずつ時間を空けながら前記第1最大電流値及び前記第2最大電流値を低くするロボットシステム。
【請求項6】
請求項2~4のいずれか1つに記載のロボットシステムにおいて、
前記コントローラは、前記電流抑制制御において、複数の前記ロケータに対して、前記第1モータに供給すべき電流値又は前記第2モータに供給すべき電流値が小さい順に前記第1最大電流値及び前記第2最大電流値を低くするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、ロボットシステムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
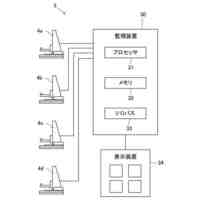
特許文献1は、特許文献1には、従来のロボットシステムが記載されている。従来のロボットシステムは、自動車の車体の組み立てラインに採用されている。従来のロボットシステムでは、組み立てラインにおいて動作及び休止区間が繰り返し駆動される複数のモータを監視するモニタリング装置が採用されている。モニタリング装置は、モータ別に、モータの正常状態で測定した時間による電流値を基に、動作区間の時間長さ、動作区間のピーク電流、動作区間に含まれている定速区間の平均電流、動作区間を分割したサブ区間別電流の積分面積に関する情報をモータの初期データとして格納する初期データ格納部と、モータの動作時に観測される動作区間ごとに、動作区間の時間長さ、ピーク電流、定速区間の平均電流、サブ区間別の積分面積に関する情報を監視因子別観測データとして格納する観測データ格納部と、観測データの各情報を、初期データの各情報に対応して既に設定された臨界レベルと個別に比較して、監視因子別にモータの状態モニタリング情報を提供するモニタリング情報提供部とを含む。
【先行技術文献】
【特許文献】
【0003】
特表2018-520947号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ロボットがワークに対して作業を行う作業エリアにおいては、複数のロケータがワークの支持と位置決めとを行う。ロケータは、ロッドによりワークを持ち上げて支持する。ロケータは、ワークを支持した状態で、ロッドを水平方向及び上下方向に移動させて、位置決めをする。ロケータがワークを支持した状態では、ロッドを上下方向に移動させるモータには比較的大きな電流が供給される。
【0005】
自動車のボデーのような長尺のワークでは、ロケータがワークを支持したときに、ワークに撓みが生じることがある。ワークに撓み又は捻れが生じると、水平方向の力がワークからロケータに入力される。水平方向の力に抗するために、ロッドを水平方向に移動させるモータにも電流を供給する必要がある。
【0006】
モータをできる限り長寿命にするには、それぞれのモータに供給する電流を小さくして、モータにかかる負荷をできる限り小さくすることが重要である。従来のロボットシステムは、初期データの各情報に対応して設定された臨界レベルとの比較により、特定のモータへの負荷が過剰であるか否かは判定できる。しかしながら、従来のロボットシステムは、それぞれのモータにかかる負荷を小さくできない。
【課題を解決するための手段】
【0007】
ここに開示する技術は、ロボットシステムに関する。ロボットシステムは、
水平面内の第1方向又は前記第1方向と交差する第2方向に離間して配置された複数のロケータであって、作業エリアに搬送されたワークを持ち上げて支持するロッドと、第1モータにより作動しかつ前記第1方向に前記ロッドを移動させる第1ステージと、第2モータにより作動しかつ水平面内で前記第2方向に前記ロッドを移動させる第2ステージとを含む複数のロケータと、
前記第1モータ及び前記第2モータに供給する電流値を制御するコントローラであって、前記ロッドが前記ワークを支持した状態で、前記第1モータ及び前記第2モータの負荷に関する所定条件が満たされるときには、前記第1モータに供給可能な第1最大電流値及び前記第2モータに供給可能な第2最大電流値の少なくとも一方を、予め設定された値から低くする電流抑制制御を実行するコントローラと、を備える。
【発明の効果】
【0008】
第1最大電流値及び第2最大電流値の少なくとも一方を低くすることで、モータが過剰な力を出力しなくなる。このため、それぞれのモータにかかる負荷を小さくできる。
【図面の簡単な説明】
【0009】
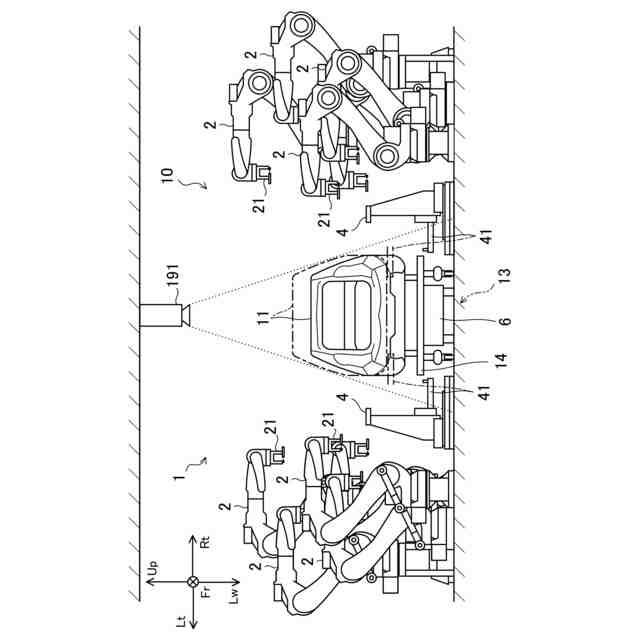
図1は、自動車の製造ラインに適用された実施形態1に係るロボットシステムを示す。
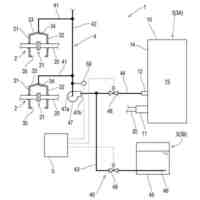
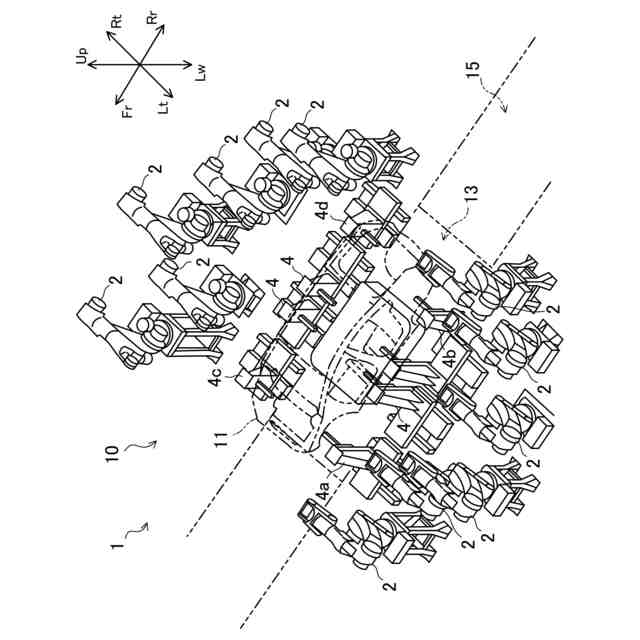
図2は、ロボットシステムを示す。
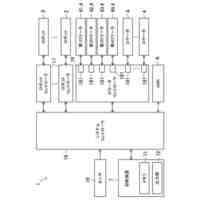
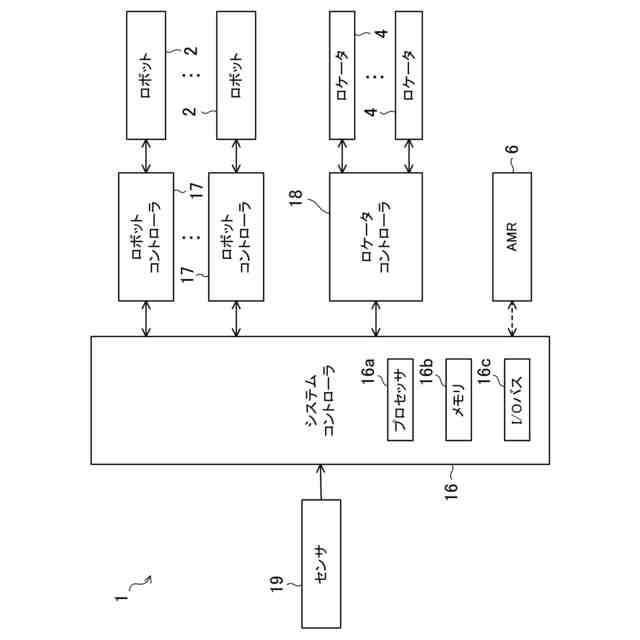
図3は、ロボットシステムのブロック図である。
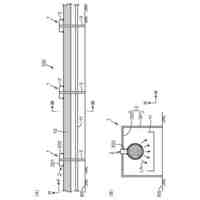
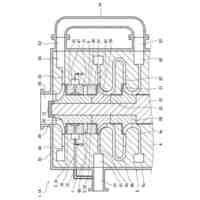
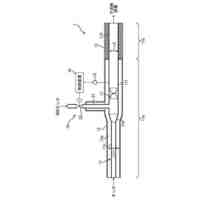
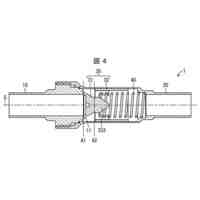
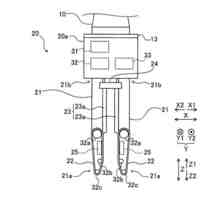
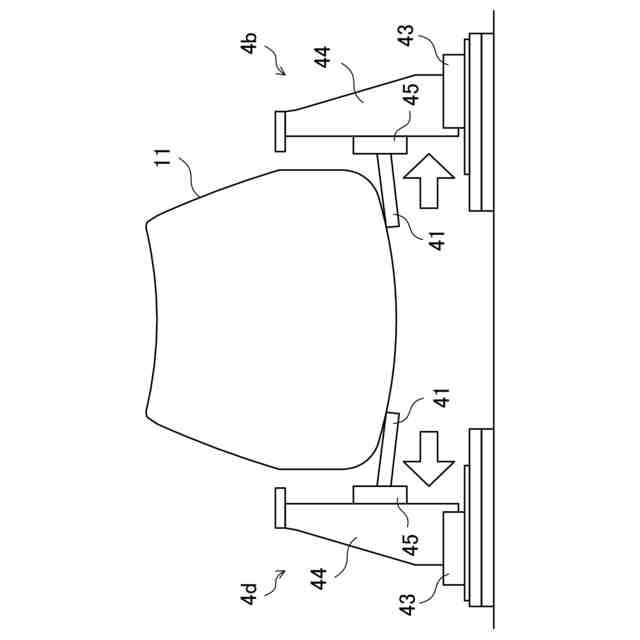
図4は、ロケータの概略図である。
図5は、ロケータの第3モータに供給される電流の一例を示す。
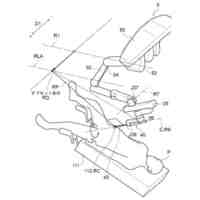
図6は、ワークからロケータに入力される力を概略的に示す。
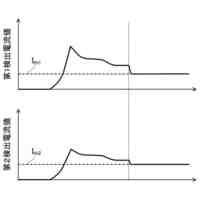
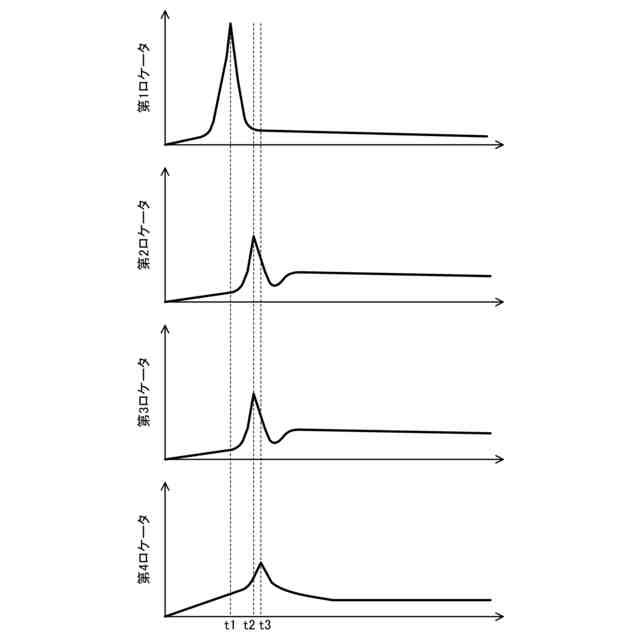
図7は、第1モータに供給される電流の一例を示す。
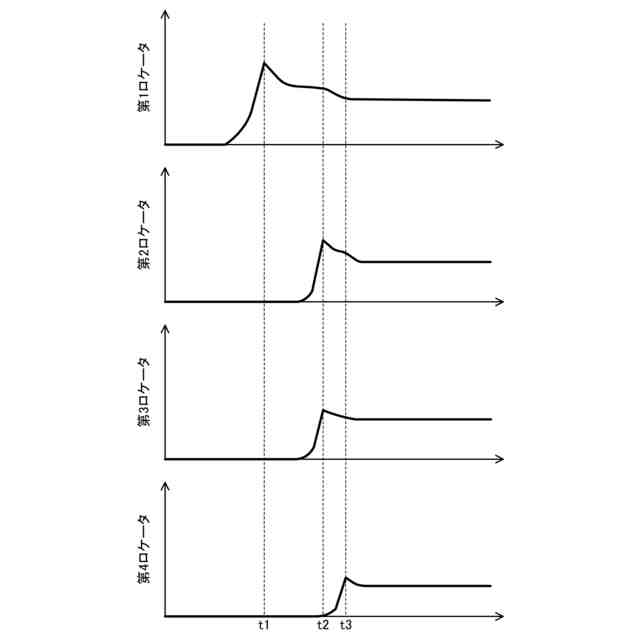
図8は、電流抑制制御を行ったときに第1モータ及び第2モータに供給される電流の一例を示す。
図9は、ロッドの位置を調整する手順を示す。
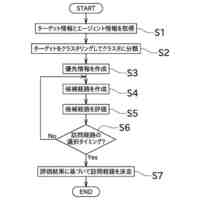
図10は、ロケータの制御手順を示すフローチャートである。
【発明を実施するための形態】
【0010】
以下、ロボットシステムの実施形態について、図面を参照しながら説明する。ここで説明するロボットシステムは例示である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
26日前
川崎重工業株式会社
断熱配管
26日前
川崎重工業株式会社
水中構造体
7日前
川崎重工業株式会社
監視システム
27日前
川崎重工業株式会社
塗装システム
26日前
川崎重工業株式会社
配管の支持構造
27日前
川崎重工業株式会社
遠心式ターボ機械
6日前
川崎重工業株式会社
ロボットシステム
27日前
川崎重工業株式会社
ロボットシステム
27日前
川崎重工業株式会社
廃棄物処理システム
19日前
川崎重工業株式会社
ワーク搬送ロボット
26日前
川崎重工業株式会社
ダイクッション装置
6日前
川崎重工業株式会社
バーナおよび燃焼器
7日前
川崎重工業株式会社
多段遠心ターボ機械
12日前
川崎重工業株式会社
極低温流体用配管設備
28日前
川崎重工業株式会社
ガスタービンエンジン
8日前
川崎重工業株式会社
ロボットの診断システム
27日前
川崎重工業株式会社
航空機の電気機械システム
8日前
株式会社キッツ
逆流防止弁
27日前
川崎重工業株式会社
支援システムおよび支援方法
26日前
川崎重工業株式会社
経路作成方法及び経路作成装置
26日前
川崎重工業株式会社
付加製造方法及び付加製造装置
6日前
川崎重工業株式会社
付加製造方法及び付加製造装置
6日前
川崎重工業株式会社
クローズドインペラの製造方法
9日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
6日前
川崎重工業株式会社
アンモニア回収システム及び方法
26日前
川崎重工業株式会社
配管の接続構造および配管システム
29日前
川崎重工業株式会社
ロボットシステム及びその動作方法
28日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
26日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
6日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
26日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
26日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
26日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
26日前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
26日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
26日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ