TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025152922
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024055106
出願日
2024-03-28
発明の名称
手術ロボットシステムおよびその制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
A61B
34/37 20160101AFI20251002BHJP(医学または獣医学;衛生学)
要約
【課題】手術中の状況の変化に適切に対応する。
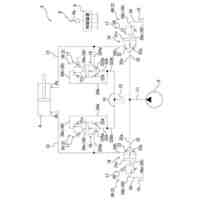
【解決手段】手術ロボットシステム10は、各々に手術器具40が装着される複数のロボットアーム3と、手術器具40の位置および姿勢を制御するための操作者Sの操作入力を受け付ける操作装置2と、操作入力に基づいて複数のロボットアーム3を制御するアーム制御部28と、複数のロボットアーム3が装着されたアームベース5を有するポジショナ7と、ポジショナ7を制御してアームベース5の位置および姿勢を調整するポジショナ制御部75と、を備える。ポジショナ制御部75は、手術中にアームベース5の位置および姿勢の少なくとも一方を調整する。アーム制御部28は、ポジショナ制御部75によるアームベース5の位置および/または姿勢の調整によって手術器具40の運動が影響を受けることなく、ロボットアーム3を制御する。
【選択図】図23
特許請求の範囲
【請求項1】
複数のロボットアームであって、前記複数のロボットアームの各々に手術器具が装着される、複数のロボットアームと、
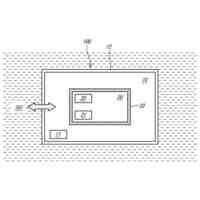
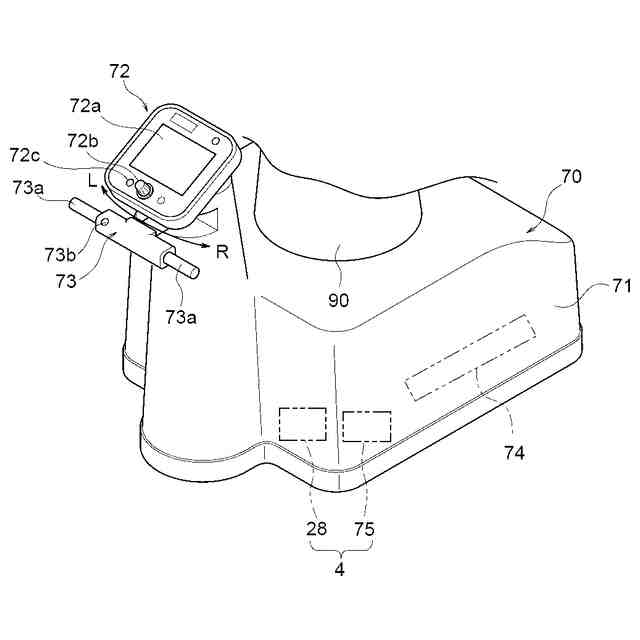
前記手術器具の位置および姿勢を制御するための操作者の操作入力を受け付ける操作装置と、
前記操作入力に基づいて前記複数のロボットアームを制御するアーム制御部と、
前記複数のロボットアームが装着されたアームベースを有するポジショナと、
前記ポジショナを制御して前記アームベースの位置および姿勢を調整するポジショナ制御部と、を備え、
前記ポジショナ制御部は、手術中に前記アームベースの前記位置および前記姿勢の少なくとも一方を調整し、
前記アーム制御部は、前記ポジショナ制御部による前記アームベースの前記位置および前記姿勢の少なくとも一方の調整によって前記手術器具の運動が影響を受けることなく、前記複数のロボットアームを制御する、手術ロボットシステム。
続きを表示(約 890 文字)
【請求項2】
前記ポジショナ制御部は、手術中に変化する術中状態に基づいて前記アームベースの前記位置および前記姿勢の少なくとも一方を調整する、請求項1記載の手術ロボットシステム。
【請求項3】
前記ポジショナ制御部は、前記アームベースの前記位置および前記姿勢の少なくとも一方を調整することによって、前記複数のロボットアームのうちの少なくとも1つである対象のロボットアームについて、術野内で前記手術器具が動作できる領域として規定される器具動作可能範囲を調整する、請求項2記載の手術ロボットシステム。
【請求項4】
前記ポジショナ制御部は、手術中に変化する前記術野に基づいて前記アームベースの前記位置および前記姿勢の少なくとも一方を調整する、請求項3記載の手術ロボットシステム。
【請求項5】
前記術野は、手術中に手術部位を撮像する撮像装置の位置および姿勢の少なくとも一方に基づいて規定される、請求項4記載の手術ロボットシステム。
【請求項6】
前記操作者からの指令に基づいて手術中に前記術野を指定する術野指定手段を有する、請求項4記載の手術ロボットシステム。
【請求項7】
手術台の傾きに基づいて前記術野を自動的に推定する術野推定手段を有する、請求項4記載の手術ロボットシステム。
【請求項8】
前記操作者からの指令に基づいて前記対象のロボットアームを選択する手動アーム選択手段を有する、請求項3または4に記載の手術ロボットシステム。
【請求項9】
前記操作者からの前記操作入力によって操作されているロボットアームを前記対象のロボットアームとして選択する自動アーム選択手段を有する、請求項3または4に記載の手術ロボットシステム。
【請求項10】
前記ポジショナ制御部は、前記アームベースの周囲に予め設定された仮想空間と前記アームベースとの距離を一定以上に維持する、請求項1または2に記載の手術ロボットシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、手術ロボットシステムおよびその制御方法に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
従来、手術器具を外科医が直接手に取って操作する手術方式に代えて、ロボットを利用して手術器具を操作して外科手術を行うための手術ロボットシステムが開示されている。手術ロボットシステムは、例えば、外科手術を受ける患者への負担を軽減することができる低侵襲外科手術(minimally invasive surgery)において使用される。
【0003】
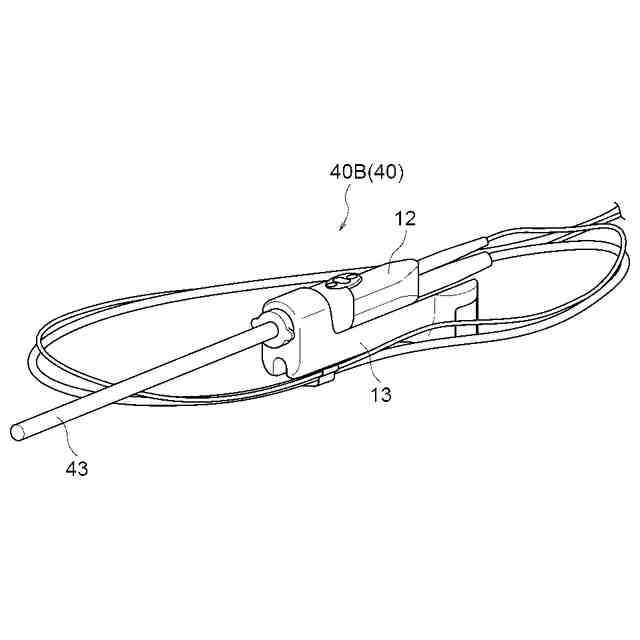
手術ロボットシステムは、一般に、患者の傍に配置された手術ロボットと、外科医がリモートで手術ロボットを操作するための操作装置とを備えている。外科医が操作する操作装置は、例えば、患者が載置された手術ベッドが配置されている手術室の内部に配置される。手術ロボットは、ロボットアームを有し、ロボットアームには、手術器具が着脱可能に装着される。ロボットアームに装着される手術器具は、例えば、患者に設けられたポート部材に挿通可能な構成を備えている。ポート部材は、例えばトロカーまたはカニューレである。手術器具の種類は、鉗子、電気メス、ステープラー、内視鏡等であり、それらの中から手術の術式等に応じて適宜選択される。手術ロボットが複数のロボットアームを備えている場合には、ロボットアーム毎に異なる種類の手術器具を装着する場合もあるし、同じ種類の手術器具を2本またはより多くのロボットアームに装着する場合もある。例えば、1本のロボットアームに内視鏡を装着し、他の2本またはより多くのロボットアームに鉗子を装着する。
【0004】
外科医(操作者)は、操作装置を操作して手術ロボットを操作することによって、ロボットアームに装着された手術器具の位置および姿勢を制御することができる。鉗子のように手術器具自身が関節等の可動部を有している場合には、手術器具の可動部の操作も操作装置によって行うことができる。これにより、手術器具の位置および姿勢(可動部を有する場合は可動部についても)を、外科医は、操作装置によって制御することができる。例えば、手術器具が、シャフト部の先端に一対のジョーを設けた構成を備える場合、外科医は、操作装置を操作することによって、手術器具全体の位置および姿勢を制御すると共に、一対のジョーの開閉操作、あるいはピッチ軸および/またはヨー軸回りの回転操作を制御することができる。また、シャフト部自身がその長手軸線周りに回転可能に構成されている場合には、外科医は、操作装置を操作することによって、手術器具のシャフト部の回転操作(ロール軸回りの操作)を行うことができる。
【0005】
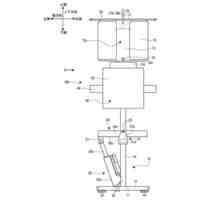
従来の手術ロボットシステムの中には、複数のロボットアームが装着されたアームベースを有するポジショナを備えたものがある。(例えば、特許文献1参照)。この従来の手術ロボットシステムにおいては、例えば患者の体壁を貫通するポート部材(カニューレ、トロカー等)の位置に応じて、手術の開始前にポジショナによってアームベースが位置決めされる。
【先行技術文献】
【特許文献】
【0006】
国際公開第2022/138495号
【発明の概要】
【発明が解決しようとする課題】
【0007】
従来の手術ロボットシステムにおいては、手術の開始前にアームベースを位置決めしたら、いったん位置決めしたアームベースを手術中に変更することは基本的に想定されておらず、手術中の状況の変化への対応に関してさらなる改善の余地がある。
【0008】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、手術中の状況の変化に適切に対応することができる手術ロボットシステムおよびその制御方法を提供することである。
【課題を解決するための手段】
【0009】
(態様1)
この開示の態様1は、
複数のロボットアームであって、前記複数のロボットアームの各々に手術器具が装着される、複数のロボットアームと、
前記手術器具の位置および姿勢を制御するための操作者の操作入力を受け付ける操作装置と、
前記操作入力に基づいて前記複数のロボットアームを制御するアーム制御部と、
前記複数のロボットアームが装着されたアームベースを有するポジショナと、
前記ポジショナを制御して前記アームベースの位置および姿勢を調整するポジショナ制御部と、を備え、
前記ポジショナ制御部は、手術中に前記アームベースの前記位置および前記姿勢の少なくとも一方を調整し、
前記アーム制御部は、前記ポジショナ制御部による前記アームベースの前記位置および前記姿勢の少なくとも一方の調整によって前記手術器具の運動が影響を受けることなく、前記複数のロボットアームを制御する、手術ロボットシステムである。
【0010】
(態様2)
この開示の態様2は、前記ポジショナ制御部は、手術中に変化する術中状態に基づいて前記アームベースの前記位置および前記姿勢の少なくとも一方を調整する、態様1記載の手術ロボットシステムである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
水中構造体
8日前
川崎重工業株式会社
遠心式ターボ機械
7日前
川崎重工業株式会社
廃棄物処理システム
20日前
川崎重工業株式会社
多段遠心ターボ機械
13日前
川崎重工業株式会社
ダイクッション装置
7日前
川崎重工業株式会社
バーナおよび燃焼器
8日前
川崎重工業株式会社
ガスタービンエンジン
9日前
川崎重工業株式会社
航空機の電気機械システム
9日前
川崎重工業株式会社
クローズドインペラの製造方法
10日前
川崎重工業株式会社
付加製造方法及び付加製造装置
7日前
川崎重工業株式会社
付加製造方法及び付加製造装置
7日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
7日前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
7日前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
9日前
川崎重工業株式会社
ポペット弁装置、及びそれを備える液圧駆動システム
23日前
川崎重工業株式会社
二酸化炭素排出システム及び方法、並びに水中航走体
2日前
川崎重工業株式会社
基板搬送ロボットおよび基板搬送ロボットの制御方法
7日前
川崎重工業株式会社
レーダ反射断面積切換装置及びレーダ反射断面積切換方法
7日前
川崎重工業株式会社
ロボット
1日前
川崎重工業株式会社
学習済モデルの構築方法
6日前
川崎重工業株式会社
水素航空機の燃料供給システム
15日前
川崎重工業株式会社
摩擦攪拌ツールの制御方法及び摩擦攪拌装置
23日前
川崎重工業株式会社
状態監視装置、状態監視方法及び状態監視プログラム
23日前
個人
貼付剤
10日前
個人
短下肢装具
3か月前
個人
前腕誘導装置
3か月前
個人
白内障治療法
7か月前
個人
排尿補助器具
23日前
個人
洗井間専家。
7か月前
個人
嚥下鍛錬装置
4か月前
個人
ホバーアイロン
7か月前
個人
歯の修復用材料
4か月前
個人
矯正椅子
5か月前
個人
胸骨圧迫補助具
2か月前
個人
アイマスク装置
2か月前
個人
バッグ式オムツ
4か月前
続きを見る
他の特許を見る









 特許ウォッチ
特許ウォッチ