TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025164396
公報種別
公開特許公報(A)
公開日
2025-10-30
出願番号
2024068351
出願日
2024-04-19
発明の名称
基板搬送ロボットおよび基板搬送ロボットの制御方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
H01L
21/677 20060101AFI20251023BHJP(基本的電気素子)
要約
【課題】基板に凹みなどが形成されている場合でも正確に基板を検出することが可能な基板搬送ロボットを提供する。
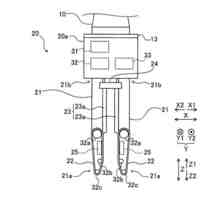
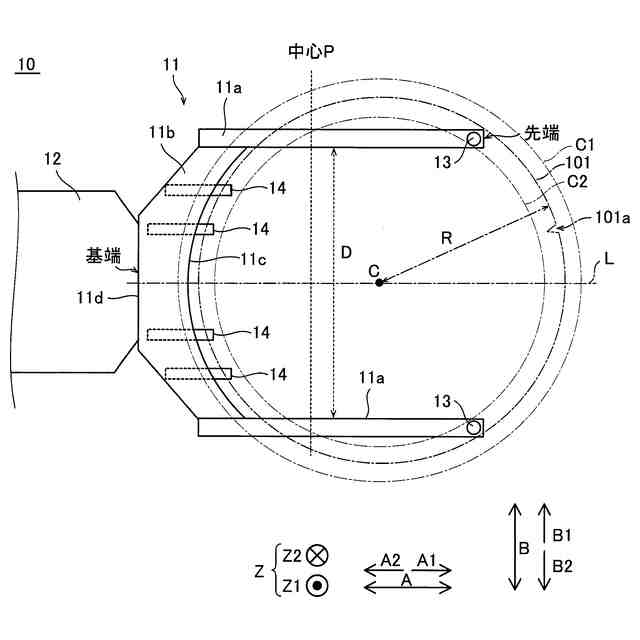
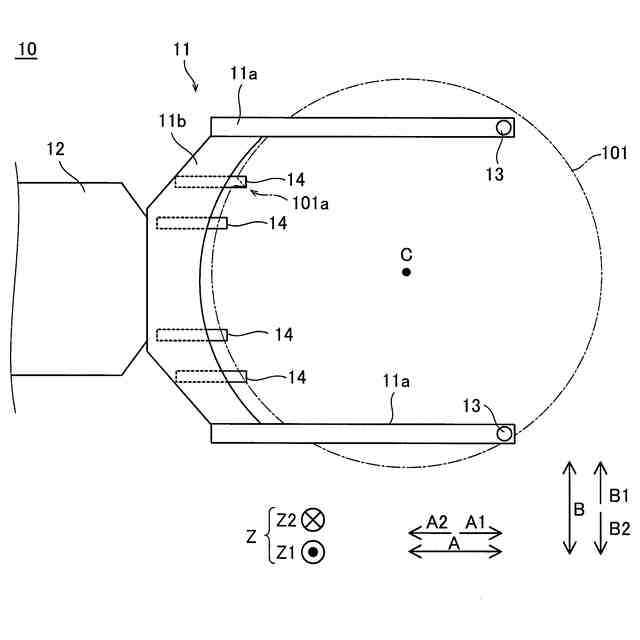
【解決手段】この基板搬送ロボット100は、基板101を保持するブレード部11を含むハンド10と、ブレード部11において、ブレード部11の先端と基端との間の中心Pよりも基端に寄せて配置される4個以上の検出部14と、4個以上の検出部14の検出結果に基づいて、基板101を検出する制御部70と、を備える。
【選択図】図3
特許請求の範囲
【請求項1】
基板を保持するブレード部を含むハンドと、
前記ブレード部において前記ブレード部の先端と基端との間の中心よりも基端に寄せて配置され、前記基板を検出する4個以上の検出部と、を備える、基板搬送ロボット。
続きを表示(約 960 文字)
【請求項2】
前記ブレード部は、前記基板を保持する一対の爪部と、前記一対の爪部を接続する接続部と、を有する二股形状を有し、
前記4個以上の検出部は、前記接続部の縁に沿って配置されている、請求項1に記載の基板搬送ロボット。
【請求項3】
前記接続部は、弧形状を有し、
前記4個以上の検出部は、前記弧形状の接続部の縁に沿って配置されている、請求項2に記載の基板搬送ロボット。
【請求項4】
前記4個以上の検出部は、前記一対の爪部の間において、前記接続部の縁に沿って配置されている、請求項2に記載の基板搬送ロボット。
【請求項5】
前記基板は、円板形状を有し、
前記一対の爪部同士の間隔は、前記円板形状の基板の直径の60%以上100%以下である、請求項2に記載の基板搬送ロボット。
【請求項6】
前記4個以上の検出部は、前記ブレード部の表面に垂直な方向から見て、前記ブレード部が延びる方向に沿った前記ブレード部の中心線に対して、一方側と他方側とに分かれて配置されている、請求項1に記載の基板搬送ロボット。
【請求項7】
前記基板は、円板形状を有し、
前記4個以上の検出部は、前記円板形状の基板の半径の±10%の範囲の半径を有する円周に沿って配置されている、請求項1に記載の基板搬送ロボット。
【請求項8】
前記ハンドは、前記基板を下方から支持する基板支持部を含み、
前記4個以上の検出部は、前記ブレード部において、前記基板支持部よりも基端に寄せて配置されている、請求項1に記載の基板搬送ロボット。
【請求項9】
前記ハンドは、前記ブレード部の表面に前記基板が載置されることによって前記基板を保持するパッシブ型ハンド、または、前記ブレード部の表面において前記基板を吸着する吸着型ハンドを含む、請求項1に記載の基板搬送ロボット。
【請求項10】
前記4個以上の検出部は、各々、前記基板に検出光を出射するとともに前記基板に反射された光を検出する反射型の光学式センサを含む、請求項1に記載の基板搬送ロボット。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、基板搬送ロボットおよび基板搬送ロボットの制御方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、基板搬送ロボットが開示されている。特許文献1に開示されている基板搬送ロボットは、基板を保持するハンドと、ハンドを移動させるアームとを備えている。特許文献1では、ハンドは、二股に分かれるY字形状を有している。また、ハンドに3個のセンサが配置されている。3個のセンサは、基板に向かって光を出射するとともに基板に反射された光を受光する反射型のセンサである。特許文献1では、ハンドの二股に分かれる部分に1個のセンサが配置され、この1個のセンサよりも基端側に残りの2個のセンサが配置されている。そして、特許文献1では、ハンドを基板が配置されるカセット内に侵入するように移動させ、先端側の1個のセンサによって基板の端部を検知する。その後、ハンドをさらにカセット内に移動させ、基端側の2個のセンサによって基板の端部を検知する。基端側の2個のセンサによって基板の端部を検知した時点で、ハンドの移動が終了する。また、基端側の2個のセンサによって同時に基板の端部が検出された場合、基板に対するハンドの侵入位置が正常であると判定される。一方、基端側の2個のセンサによって異なるタイミングで基板の端部が検出された場合、基板に対するハンドの侵入位置が異常であると判定される。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2016/0133502号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、上記特許文献1に開示されているようにハンドに3個のセンサが配置されていれば、3個のセンサの検出結果から基板の位置を正確に検出することが可能である。ところで、半導体ウエハなどの基板では、半導体ウエハの結晶方位が判別可能なように、V字型の凹みであるノッチや平部であるオリエンテーションフラットが形成される場合がある。そして、3個のセンサのうちの1つからノッチやオリエンテーションフラットに向かって光が出射された場合、基板から光が反射されず、残りの2個のセンサにより検出された反射光だけでは基板の位置を正確に検出できない。そこで、基板に凹みなどが形成されている場合でも正確に基板を検出することが可能な基板搬送ロボットが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、基板に凹みなどが形成されている場合でも正確に基板を検出することが可能な基板搬送ロボットおよび基板搬送ロボットの制御方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による基板搬送ロボットは、基板を保持するブレード部を含むハンドと、ブレード部においてブレード部の先端と基端との間の中心よりも基端に寄せて配置され、基板を検出する4個以上の検出部と、を備える。
【0007】
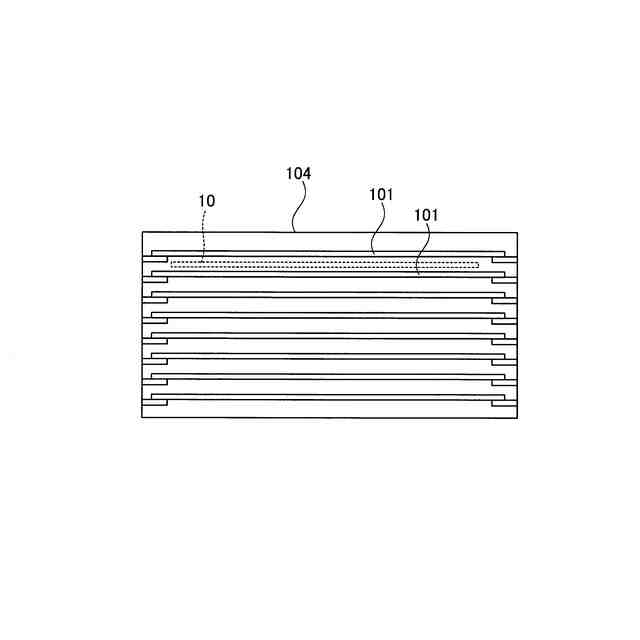
この開示の第1の局面による基板搬送ロボットは、上記のように、ブレード部においてブレード部の先端と基端との間の中心よりも基端に寄せて配置され、基板を検出する4個以上の検出部を備える。これにより、4個以上の検出部のうちの1つが凹みなどのために基板を検出できない場合でも、残りの3個以上の検出部によって基板を検出できる。その結果、基板に凹みなどが形成されている場合でも正確に基板を検出できる。また、4個以上の検出部がブレード部においてブレード部の先端と基端との間の中心よりも基端に寄せて配置されている。これにより、検出部がブレード部の先端側に配置されている場合に比べて、ブレード部の先端側の厚みが大きくなるのが抑制されるので、複数の基板が比較的狭い間隔を隔てて積層されている場合でも、基板と検出部との干渉を回避しながらブレード部の先端側を基板の間に侵入させることができる。
【0008】
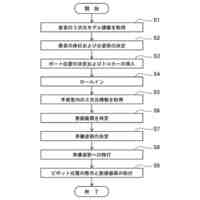
この開示の第2の局面による基板搬送ロボットの制御方法は、ブレード部においてブレード部の先端と基端との間の中心よりも基端に寄せて配置され、基板を検出する4個以上の検出部を備えるハンドを、複数の基板が積層されている基板載置部内に侵入させることと、4個以上の検出部により基板を検出することと、を備える。
【0009】
この開示の第2の局面による基板搬送ロボットの制御方法は、上記のように、ブレード部においてブレード部の先端と基端との間の中心よりも基端に寄せて配置され、基板を検出する4個以上の検出部により基板を検出することを備える。これにより、4個以上の検出部のうちの1つが凹みなどのために基板を検出できない場合でも、残りの3個以上の検出部によって基板を検出できる。その結果、基板に凹みなどが形成されている場合でも正確に基板を検出することが可能な基板搬送ロボットの制御方法を提供できる。また、4個以上の検出部がブレード部においてブレード部の先端と基端との間の中心よりも基端に寄せて配置されている。これにより、検出部がブレード部の先端側に配置されている場合に比べて、ブレード部の先端側の厚みが大きくなるのが抑制されるので、複数の基板が比較的狭い間隔を隔てて積層されている場合でも、基板と検出部との干渉を回避しながらブレード部の先端側を基板の間に侵入させることが可能な基板搬送ロボットの制御方法を提供できる。
【発明の効果】
【0010】
本開示によれば、基板に凹みなどが形成されている場合でも正確に基板を検出することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
1か月前
川崎重工業株式会社
断熱配管
1か月前
川崎重工業株式会社
水中構造体
25日前
川崎重工業株式会社
塗装システム
1か月前
川崎重工業株式会社
配管の支持構造
1か月前
川崎重工業株式会社
ロボットシステム
1か月前
川崎重工業株式会社
遠心式ターボ機械
24日前
川崎重工業株式会社
ワーク搬送ロボット
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
多段遠心ターボ機械
1か月前
川崎重工業株式会社
ダイクッション装置
24日前
川崎重工業株式会社
バーナおよび燃焼器
25日前
川崎重工業株式会社
多段ラジアルタービン
16日前
川崎重工業株式会社
ガスタービンエンジン
26日前
川崎重工業株式会社
航空機の電気機械システム
26日前
川崎重工業株式会社
支援システムおよび支援方法
1か月前
株式会社キッツ
逆流防止弁
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
24日前
川崎重工業株式会社
クローズドインペラの製造方法
27日前
川崎重工業株式会社
経路作成方法及び経路作成装置
1か月前
川崎重工業株式会社
付加製造方法及び付加製造装置
24日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
24日前
川崎重工業株式会社
アンモニア回収システム及び方法
1か月前
横浜ゴム株式会社
多層空洞音響材
16日前
川崎重工業株式会社
手術支援システムおよび手術支援方法
1か月前
川崎重工業株式会社
多段遠心圧縮機および圧縮機システム
24日前
川崎重工業株式会社
ロボットハンドおよびロボットシステム
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
川崎重工業株式会社
手術ロボットシステムおよびその制御方法
1か月前
川崎重工業株式会社
廃棄物処理システムおよび廃棄物用振動装置
26日前
川崎重工業株式会社
ワーク搬送ロボットおよびロボット制御方法
1か月前
川崎重工業株式会社
船舶の推進システム、制御プログラムおよび制御方法
1か月前
川崎重工業株式会社
手術支援システム、手術支援方法および情報提供方法
1か月前
川崎重工業株式会社
多段遠心圧縮機のケーシング、及び、多段遠心圧縮機
3日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ