TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025153757
公報種別
公開特許公報(A)
公開日
2025-10-10
出願番号
2024056381
出願日
2024-03-29
発明の名称
船舶の推進システム、制御プログラムおよび制御方法
出願人
川崎重工業株式会社
代理人
弁理士法人有古特許事務所
主分類
B63H
21/21 20060101AFI20251002BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】エンジンおよび回転機を備えた船舶において、推進プロペラにおける負荷変動に伴う燃費の悪化を抑制することができる船舶の推進システム、制御プログラムおよび制御方法を提供する。
【解決手段】船舶の推進システムは、エンジンと、回転機と、電力変換器と、制御器と、を備え、制御器は、エンジンのトルクと、回転機のトルクと、回転機の角速度と、予め定められた回転機の回転軸換算の慣性モーメントを取得し、回転機の回転軸系の運動方程式を用いて推進プロペラの負荷トルクの推定値を算出し、推進力指令値から回転機に発生させるトルクについてのトルク指令値を生成し、負荷トルクの推定値における変動成分を打ち消すようにトルク指令値を補正する。
【選択図】図2
特許請求の範囲
【請求項1】
推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能または前記推進プロペラに動力伝達可能な回転機と、
前記回転機に電気的に接続される電力変換器と、
推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の推進システムであって、
前記制御器は、
前記エンジンのトルクと、前記回転機のトルクと、前記回転機の角速度と、予め定められた前記回転機の回転軸換算の慣性モーメントを取得し、
前記回転機の回転軸系の運動方程式を用いて前記推進プロペラの負荷トルクの推定値を算出し、
前記推進力指令値から前記回転機に発生させるトルクについてのトルク指令値を生成し、
前記負荷トルクの推定値における変動成分を打ち消すように前記トルク指令値を補正する、推進システム。
続きを表示(約 1,600 文字)
【請求項2】
前記制御器は、
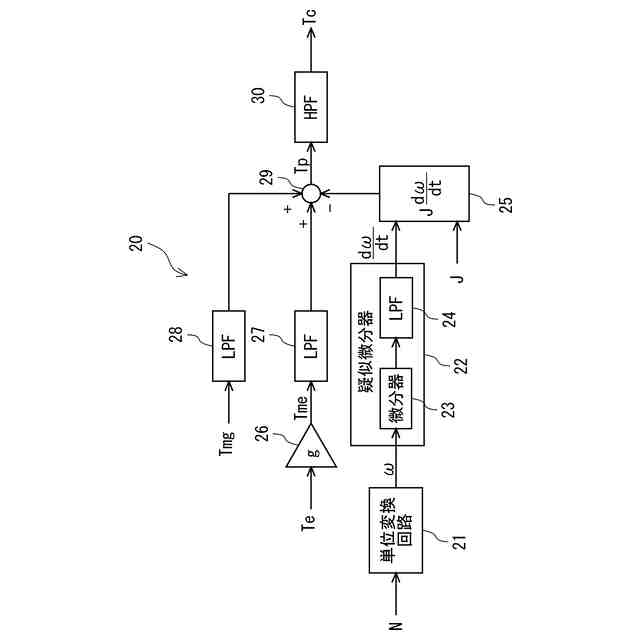
前記回転機の角速度に対して微分器およびローパスフィルタを適用することにより、前記回転機の角速度を疑似微分して回転加速度を算出し、
前記エンジンのトルクおよび前記回転機のトルクに対しても前記回転機の角速度に対して適用した前記ローパスフィルタと同じローパスフィルタを適用し、
前記回転加速度、前記ローパスフィルタ適用後の前記エンジンのトルクおよび前記回転機のトルクを前記運動方程式に適用する、請求項1に記載の推進システム。
【請求項3】
前記制御器は、
前記回転機の角速度を微分して回転加速度を算出し、
前記エンジンのトルクおよび前記回転機のトルクの和から前記回転加速度に前記慣性モーメントを掛けた値を差し引くことで前記負荷トルクの推定値を算出し、
前記負荷トルクの推定値にハイパスフィルタを適用することにより、前記負荷トルクの推定値における変動成分を抽出する、請求項1または2に記載の推進システム。
【請求項4】
前記回転機は、前記エンジンの駆動力を利用して発電可能な発電機であり、
前記制御器は、
前記負荷トルクの推定値が増えるほど前記発電機の発電量を減らし、前記負荷トルクの推定値が減るほど前記発電機の発電量を増やすように、前記トルク指令値を補正する、請求項1または2に記載の推進システム。
【請求項5】
前記回転機は、前記推進プロペラに動力伝達可能な電動機であり、
前記制御器は、
前記負荷トルクの推定値が増えるほど前記電動機の出力を増やし、前記負荷トルクの推定値が減るほど前記電動機の出力を減らすように、前記トルク指令値を補正する、請求項1または2に記載の推進システム。
【請求項6】
前記制御器は、前記推進力指令値が一定である定常航行時に前記トルク指令値の補正を行う、請求項1または2に記載の推進システム。
【請求項7】
推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能または前記推進プロペラに動力伝達可能な回転機と、
前記回転機に電気的に接続される電力変換器と、
推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御プログラムであって、
前記制御プログラムは、前記制御器に、
前記エンジンのトルクと、前記回転機のトルクと、前記回転機の角速度と、予め定められた前記回転機の回転軸換算の慣性モーメントを取得させ、
前記回転機の回転軸系の運動方程式を用いて前記推進プロペラの負荷トルクの推定値を算出させ、
前記推進力指令値から前記回転機に発生させるトルクについてのトルク指令値を生成させ、
前記負荷トルクの推定値における変動成分を打ち消すように前記トルク指令値を補正させる、制御プログラム。
【請求項8】
推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能または前記推進プロペラに動力伝達可能な回転機と、
前記回転機に電気的に接続される電力変換器と、
推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御方法であって、
前記エンジンのトルクと、前記回転機のトルクと、前記回転機の角速度と、予め定められた前記回転機の回転軸換算の慣性モーメントを取得し、
前記回転機の回転軸系の運動方程式を用いて前記推進プロペラの負荷トルクの推定値を算出し、
前記推進力指令値から前記回転機に発生させるトルクについてのトルク指令値を生成し、
前記負荷トルクの推定値における変動成分を打ち消すように前記トルク指令値を補正する、制御方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、船舶の推進システム、制御プログラムおよび制御方法に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
主機であるエンジンによって推進プロペラを駆動可能な船舶において、エンジンの余剰出力を用いて発電したり、推進力をアシストするために駆動力を発生させたりするために、回転機が備えられた船舶の推進システムが知られている。
【0003】
このような船舶において、エンジンを所定の回転数に維持して航行している場合でも天候悪化等による水面状況の変化によって推進プロペラにおける負荷が変動する。推進プロペラにおける負荷の変動によりエンジンのトルクが変動すると燃費が悪化する。
【0004】
エンジンおよび電動発電機を備えた船舶における上記負荷変動による燃費の悪化を抑制するための構成として、例えば、下記特許文献1には、エンジンの燃料供給量指令値の増減を負荷の増減とみなして、エンジンの燃料供給量指令値の変動成分をエンジン回転数の変動成分に加えた値を用いて、電動発電機の電力指令値を補正する方法が記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2015-227110号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ただし、上記特許文献1のような方法は、推進プロペラにおける負荷変動を打ち消す方向の補正指令を生成することはできるが、負荷変動を打ち消すための補正指令値の大きさを正確に決定することは難しい。したがって、エンジンおよび電動発電機等の回転機を備えた船舶において、負荷変動に伴う燃費の悪化を抑制するための制御方法には改善の余地がある。
【0007】
本開示は上記に鑑みなされたものであり、エンジンおよび回転機を備えた船舶において、推進プロペラにおける負荷変動に伴う燃費の悪化を抑制することができる船舶の推進システム、制御プログラムおよび制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
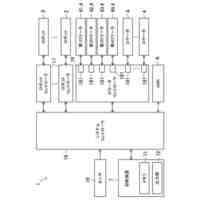
本開示の一態様に係る推進システムは、推進プロペラに機械的に接続されるエンジンと、前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能または前記推進プロペラに動力伝達可能な回転機と、前記回転機に電気的に接続される電力変換器と、推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の推進システムであって、前記制御器は、前記エンジンのトルクと、前記回転機のトルクと、前記回転機の角速度と、予め定められた前記回転機の回転軸換算の慣性モーメントを取得し、前記回転機の回転軸系の運動方程式を用いて前記推進プロペラの負荷トルクの推定値を算出し、前記推進力指令値から前記回転機に発生させるトルクについてのトルク指令値を生成し、前記負荷トルクの推定値における変動成分を打ち消すように前記トルク指令値を補正する。
【0009】
本開示の他の態様に係る制御プログラムは、推進プロペラに機械的に接続されるエンジンと、前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能または前記推進プロペラに動力伝達可能な回転機と、前記回転機に電気的に接続される電力変換器と、推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御プログラムであって、前記制御プログラムは、前記制御器に、前記エンジンのトルクと、前記回転機のトルクと、前記回転機の角速度と、予め定められた前記回転機の回転軸換算の慣性モーメントを取得させ、前記回転機の回転軸系の運動方程式を用いて前記推進プロペラの負荷トルクの推定値を算出させ、前記推進力指令値から前記回転機に発生させるトルクについてのトルク指令値を生成させ、前記負荷トルクの推定値における変動成分を打ち消すように前記トルク指令値を補正させる。
【0010】
本開示の他の態様に係る制御方法は、推進プロペラに機械的に接続されるエンジンと、
前記エンジンに機械的に接続され、前記エンジンの駆動力を利用して発電可能または前記推進プロペラに動力伝達可能な回転機と、前記回転機に電気的に接続される電力変換器と、推進力指令値に基づいて前記エンジンおよび前記電力変換器を制御する制御器と、を備えた船舶の制御方法であって、前記エンジンのトルクと、前記回転機のトルクと、前記回転機の角速度と、予め定められた前記回転機の回転軸換算の慣性モーメントを取得し、前記回転機の回転軸系の運動方程式を用いて前記推進プロペラの負荷トルクの推定値を算出し、前記推進力指令値から前記回転機に発生させるトルクについてのトルク指令値を生成し、前記負荷トルクの推定値における変動成分を打ち消すように前記トルク指令値を補正する。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
川崎重工業株式会社
ハンド
27日前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
断熱配管
27日前
川崎重工業株式会社
ロボット
1か月前
川崎重工業株式会社
ダクト継手
1か月前
川崎重工業株式会社
水中構造体
8日前
川崎重工業株式会社
塗装システム
27日前
川崎重工業株式会社
監視システム
28日前
川崎重工業株式会社
ゼオライト触媒
1か月前
川崎重工業株式会社
配管の支持構造
28日前
川崎重工業株式会社
遠心ターボ機械
1か月前
川崎重工業株式会社
ロボットシステム
28日前
川崎重工業株式会社
ロボットシステム
28日前
川崎重工業株式会社
エンドエフェクタ
1か月前
川崎重工業株式会社
遠心式ターボ機械
7日前
川崎重工業株式会社
ダイクッション装置
7日前
川崎重工業株式会社
多段遠心ターボ機械
13日前
川崎重工業株式会社
バーナおよび燃焼器
8日前
川崎重工業株式会社
廃棄物処理システム
20日前
川崎重工業株式会社
ワーク搬送ロボット
27日前
川崎重工業株式会社
ガスタービンエンジン
9日前
川崎重工業株式会社
極低温流体用配管設備
29日前
川崎重工業株式会社
締結方法及び締結装置
1か月前
川崎重工業株式会社
環状フレームの成形方法
1か月前
川崎重工業株式会社
ロボットの診断システム
28日前
川崎重工業株式会社
航空機の電気機械システム
9日前
株式会社キッツ
逆流防止弁
28日前
川崎重工業株式会社
支援システムおよび支援方法
27日前
川崎重工業株式会社
経路作成方法及び経路作成装置
27日前
川崎重工業株式会社
付加製造方法及び付加製造装置
7日前
川崎重工業株式会社
付加製造方法及び付加製造装置
7日前
川崎重工業株式会社
クローズドインペラの製造方法
10日前
川崎重工業株式会社
ガス燃料供給システムおよび船舶
1か月前
川崎重工業株式会社
アンモニア回収システム及び方法
27日前
川崎重工業株式会社
熱交換器の製造方法及び熱交換器
7日前
川崎重工業株式会社
配管の接続構造および配管システム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ