TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025145065
公報種別
公開特許公報(A)
公開日
2025-10-03
出願番号
2024045046
出願日
2024-03-21
発明の名称
ダクト継手
出願人
川崎重工業株式会社
,
株式会社ヒラサ製作所
代理人
弁理士法人有古特許事務所
主分類
F16L
21/00 20060101AFI20250926BHJP(機械要素または単位;機械または装置の効果的機能を生じ維持するための一般的手段)
要約
【課題】
フランジ継手に比べてダクトの連結作業を効率よく行うことができるダクト継手を提供する。
【解決手段】
本開示の一態様に係るダクト継手は、外周部分に枠状の受け枠を含む凹側継手と、外周部分に前記受け枠に挿入する枠状の挿入枠を含み、前記凹側継手と組み合わせる凸側継手と、を備え、前記受け枠の内周面は、前記受け枠の軸心に対して平行であるか、又は、先端に向かうにしたがって前記受け枠の軸心から離れるように傾斜しており、前記挿入枠の外周面は、先端に向かうにしたがって前記挿入枠の軸心に近づくように傾斜している。
【選択図】図1
特許請求の範囲
【請求項1】
外周部分に枠状の受け枠を含む凹側継手と、
外周部分に前記受け枠に挿入する枠状の挿入枠を含み、前記凹側継手と組み合わせる凸側継手と、を備え、
前記受け枠の内周面は、前記受け枠の軸心に対して平行であるか、又は、先端に向かうにしたがって前記受け枠の軸心から離れるように傾斜しており、
前記挿入枠の外周面は、先端に向かうにしたがって前記挿入枠の軸心に近づくように傾斜している、ダクト継手。
続きを表示(約 1,000 文字)
【請求項2】
外周部分に枠状の受け枠を含む凹側継手と、
外周部分に前記受け枠に挿入する枠状の挿入枠を含み、前記凹側継手と組み合わせる凸側継手と、を備え、
前記受け枠の内周面は、先端に向かうにしたがって前記受け枠の軸心から離れるように傾斜しており、
前記挿入枠の外周面は、前記挿入枠の軸心に対して平行であるか、又は、先端に向かうにしたがって前記挿入枠の軸心に近づくように傾斜している、ダクト継手。
【請求項3】
前記凹側継手は、前記受け枠よりも内周側に位置する内段差部を含み、
前記凹側継手と前記凸側継手の組合せ時において、前記挿入枠の先端が前記内段差部に接する、請求項1又は2に記載のダクト継手。
【請求項4】
前記内段差部は弾性材料で形成された内対向面を有する、請求項3に記載のダクト継手。
【請求項5】
前記凸側継手は、前記挿入枠よりも外周側に位置する外段差部を含み、
前記凹側継手と前記凸側継手の組合せ時において、前記受け枠の先端が前記外段差部に接する、請求項1又は2に記載のダクト継手。
【請求項6】
前記外段差部は弾性材料で形成された外対向面を有する、請求項5に記載のダクト継手。
【請求項7】
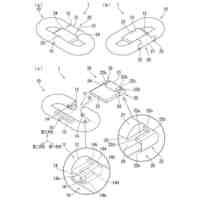
前記凹側継手及び前記凸側継手のうちの一方に位置する係止部材と、前記凹側継手及び前記凸側継手のうちの他方に位置する被係止部材と、を含み、前記凹側継手と前記凸側継手の組合せ時において、前記係止部材が前記被係止部材に係止することで、前記凹側継手に対する前記凸側継手の軸心方向への移動を制限する留め具を備えている、請求項1又は2に記載のダクト継手。
【請求項8】
前記受け枠の内周面は、前記受け枠の軸心を含む断面視において直線状であり、
前記挿入枠の外周面は、前記挿入枠の軸心を含む断面視において直線状である、請求項1に記載のダクト継手。
【請求項9】
前記受け枠の軸心を含む断面視における前記受け枠の内周面と前記受け枠の軸心がなす受け枠傾斜角度は、前記挿入枠の軸心を含む断面視における前記挿入枠の外周面と前記挿入枠の軸心がなす挿入枠傾斜角度よりも小さい、請求項8に記載のダクト継手。
【請求項10】
前記挿入枠傾斜角度は1度以下である、請求項9に記載のダクト継手。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、ダクト継手に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ダクト継手はダクトを連結する継手である。ダクト継手として、特許文献1に記載されているようなフランジ継手を用いることができる。
【先行技術文献】
【特許文献】
【0003】
特表2023-541686号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ダクトの連結作業では、連結する2つのダクトの軸心を一致させる位置合わせを行う。ダクト継手としてフランジ継手を用いる場合、上記の位置合わせに手間がかかるため、ダクトの連結作業を効率よく行うことができない。
【0005】
そこで、本開示は、フランジ継手に比べてダクトの連結作業を効率よく行うことができるダクト継手を提供することを目的としている。
【課題を解決するための手段】
【0006】
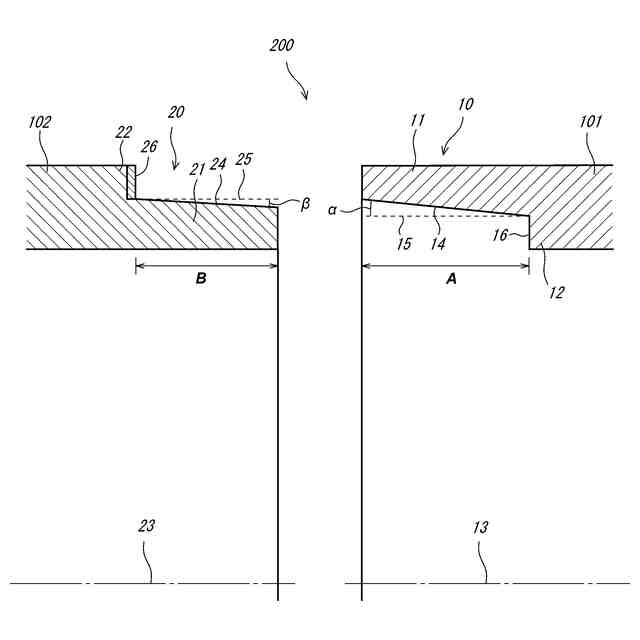
本開示の一態様に係るダクト継手は、外周部分に枠状の受け枠を含む凹側継手と、外周部分に前記受け枠に挿入する枠状の挿入枠を含み、前記凹側継手と組み合わせる凸側継手と、を備え、前記受け枠の内周面は、前記受け枠の軸心に対して平行であるか、又は、先端に向かうにしたがって前記受け枠の軸心から離れるように傾斜しており、前記挿入枠の外周面は、先端に向かうにしたがって前記挿入枠の軸心に近づくように傾斜している。
【0007】
また、本開示の他の態様に係るダクト継手は、外周部分に枠状の受け枠を含む凹側継手と、外周部分に前記受け枠に挿入する枠状の挿入枠を含み、前記凹側継手と組み合わせる凸側継手と、を備え、前記受け枠の内周面は、先端に向かうにしたがって前記受け枠の軸心から離れるように傾斜しており、前記挿入枠の外周面は、前記挿入枠の軸心に対して平行であるか、又は、先端に向かうにしたがって前記挿入枠の軸心に近づくように傾斜している。
【発明の効果】
【0008】
上記のダクト継手によれば、フランジ継手に比べてダクトの連結作業を効率よく行うことができる。
【図面の簡単な説明】
【0009】
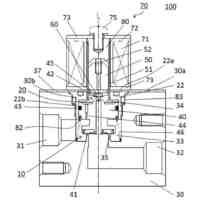
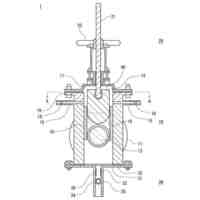
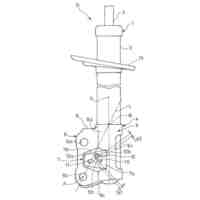
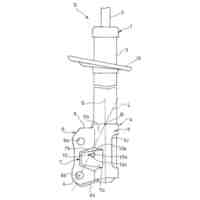
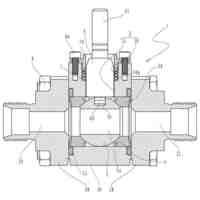
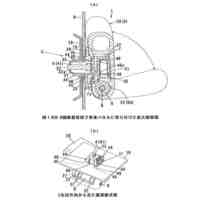
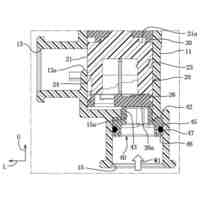
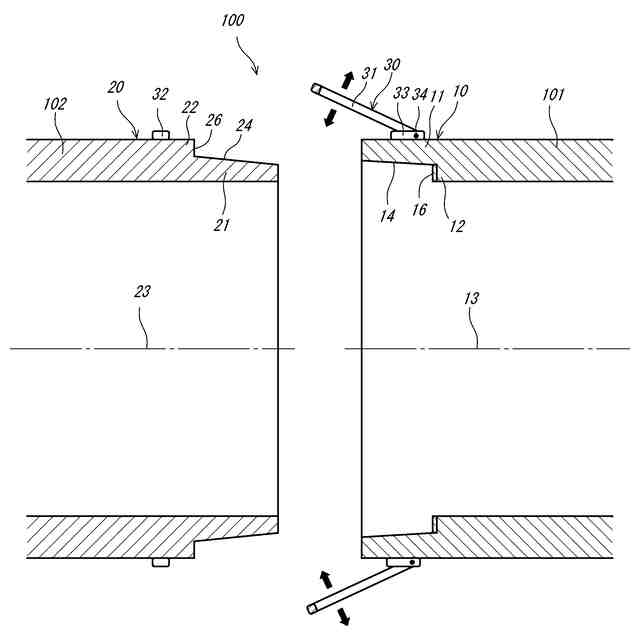
図1は、第1実施形態に係るダクト継手の組合せ前の断面図である。
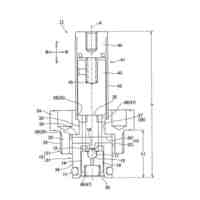
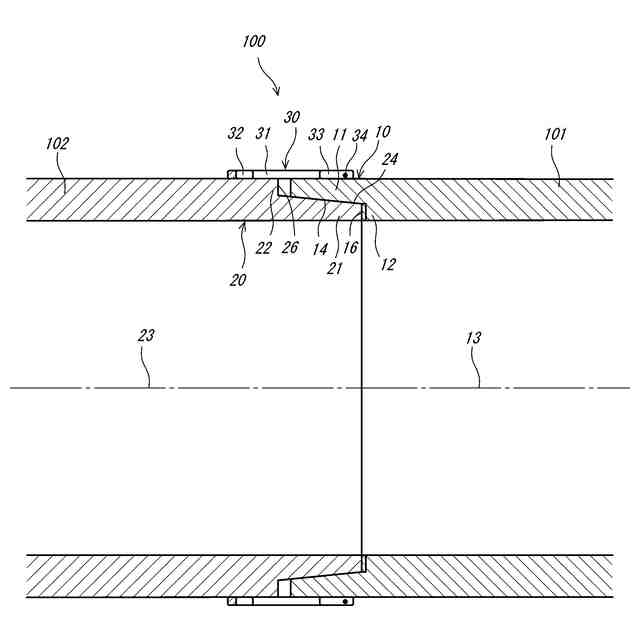
図2は、第1実施形態に係るダクト継手の組合せ時の断面図である。
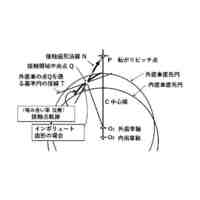
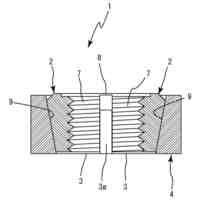
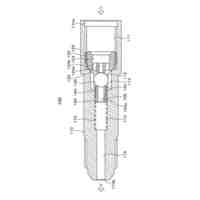
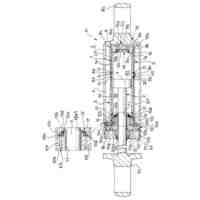
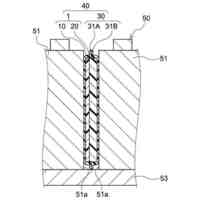
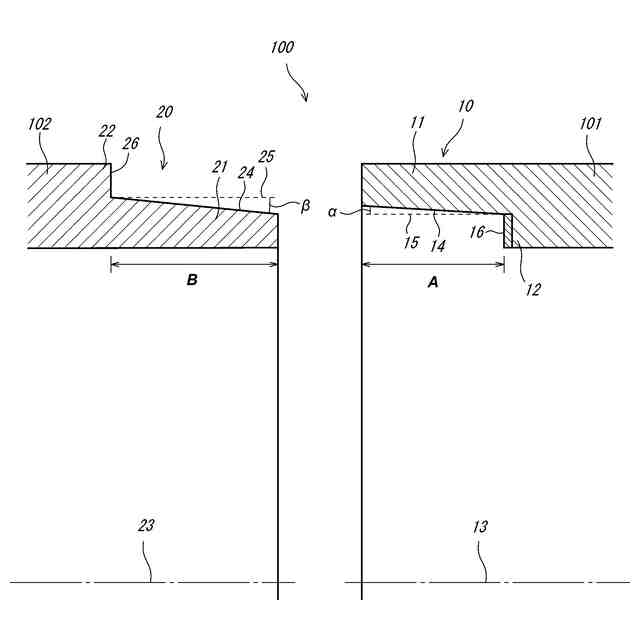
図3は、図1のうち受け枠及び挿入枠を含む範囲の拡大図である。
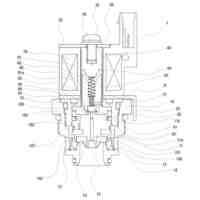
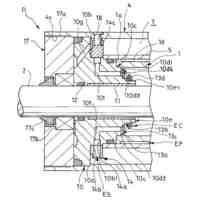
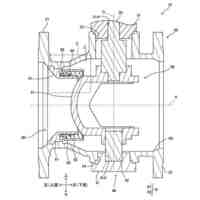
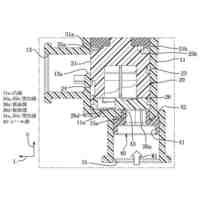
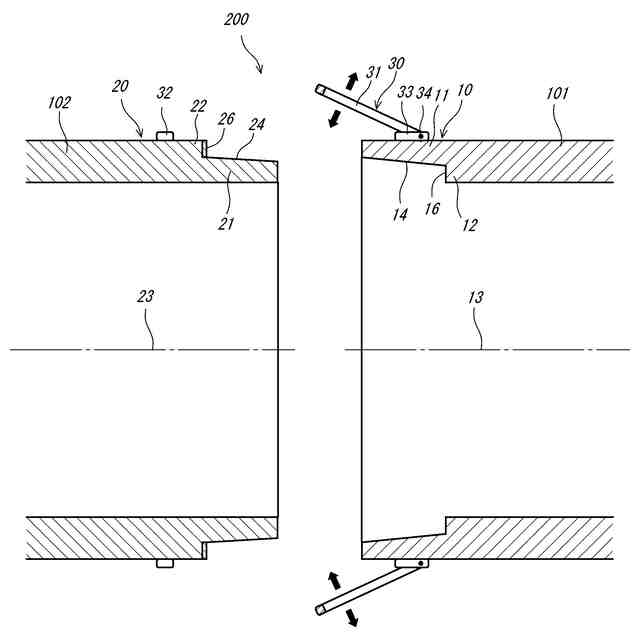
図4は、第2実施形態に係るダクト継手の組合せ前の断面図である。
図5は、第2実施形態に係るダクト継手の組合せ時の断面図である。
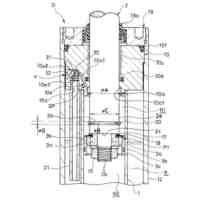
図6は、図4のうち受け枠及び挿入枠を含む範囲の拡大図である。
【発明を実施するための形態】
【0010】
(第1実施形態)
以下、実施形態について説明する。はじめに第1実施形態に係るダクト継手100について説明する。図1は、第1実施形態に係るダクト継手100の組合せ前の断面図である。図2は、第1実施形態に係るダクト継手100の組合せ時の断面図である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
留め具
1か月前
個人
鍋虫ねじ
3か月前
個人
回転伝達機構
3か月前
個人
ホース保持具
7か月前
個人
紛体用仕切弁
3か月前
個人
差動歯車用歯形
5か月前
個人
ジョイント
2か月前
個人
給排気装置
1か月前
個人
ナット
21日前
株式会社不二工機
電磁弁
6か月前
株式会社不二工機
電磁弁
4か月前
個人
地震の揺れ回避装置
4か月前
個人
ナット
2か月前
個人
ゲート弁バルブ
6日前
個人
吐出量監視装置
2か月前
カヤバ株式会社
ダンパ
5か月前
カヤバ株式会社
緩衝器
1か月前
柿沼金属精機株式会社
分岐管
3か月前
兼工業株式会社
バルブ
22日前
カヤバ株式会社
緩衝器
4か月前
カヤバ株式会社
緩衝器
4か月前
カヤバ株式会社
ダンパ
5か月前
株式会社ニフコ
クリップ
6日前
株式会社フジキン
ボールバルブ
5か月前
株式会社不二工機
電磁弁
3か月前
日東電工株式会社
断熱材
7か月前
アズビル株式会社
回転弁
2か月前
株式会社ノーリツ
分配弁
1か月前
株式会社不二工機
電動弁
1か月前
個人
固着具と固着具の固定方法
6か月前
株式会社ニフコ
クリップ
1か月前
株式会社ノーリツ
分配弁
6か月前
株式会社三五
ドライブシャフト
1か月前
株式会社ノーリツ
分配弁
6か月前
株式会社奥村組
制振機構
1か月前
株式会社奥村組
制振機構
1か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ