TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025135852
公報種別
公開特許公報(A)
公開日
2025-09-19
出願番号
2024033864
出願日
2024-03-06
発明の名称
エンドエフェクタ
出願人
川崎重工業株式会社
代理人
弁理士法人三協国際特許事務所
主分類
B25J
13/08 20060101AFI20250911BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】加圧によるワークの変形の影響を抑えながらワークの傾きを検出するエンドエフェクタを提供する。
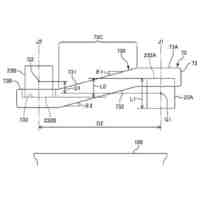
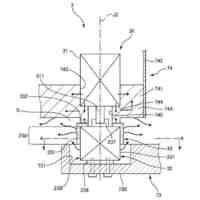
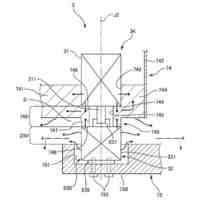
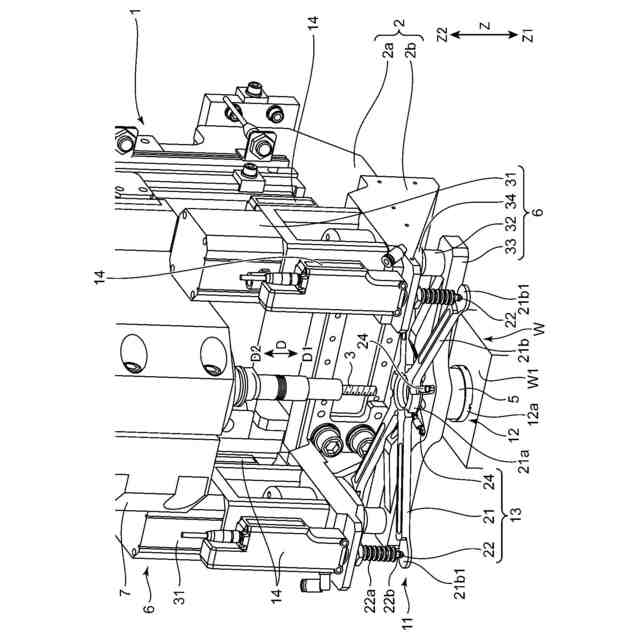
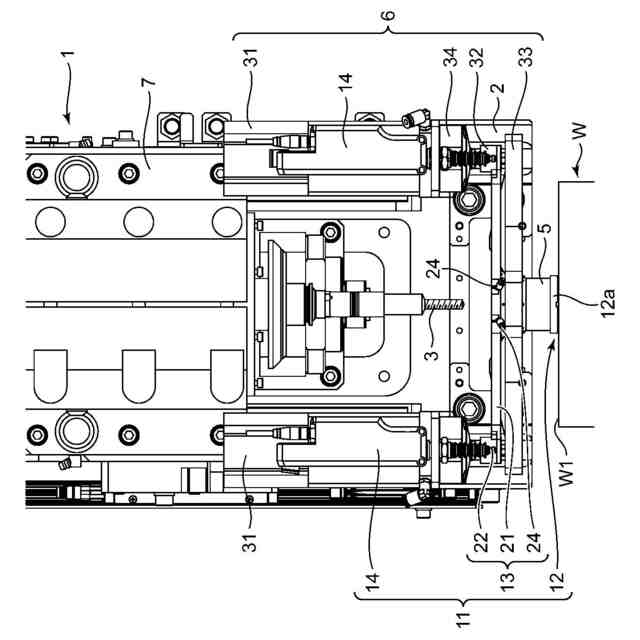
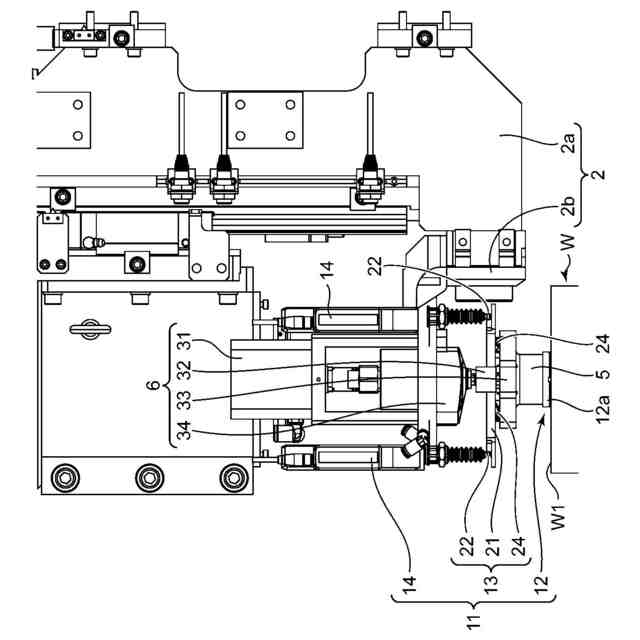
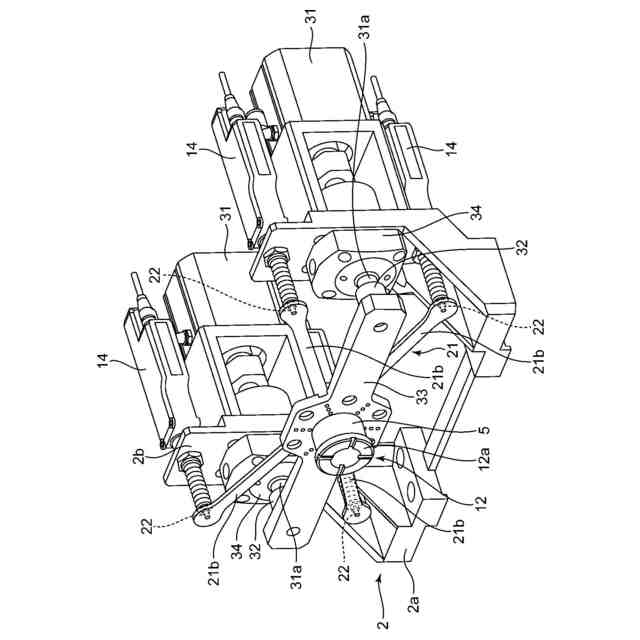
【解決手段】エンドエフェクタ(1)は、ベース部材(2)と、加工子(3)と、ワークを加圧する加圧部材(5)と、ワーク表面の傾斜角度を検出する角度検出機構(11)とを備える。角度検出機構(11)は、ワーク表面に接触する接触プローブ(12)と、接触プローブ(12)を、ベース部材(2)に対して角度変化可能に支持し、かつ加圧部材(5)に対して所定方向(D)に進退可能に支持する支持構造(13)と、所定方向(D)に対する接触プローブ(12)の傾斜角度を検出する角度検出センサ(14)とを有する。接触プローブ(12)の接触部(12a)は、加圧部材(5)に対し、所定方向であるドリル軸方向(D)のうちベース部材(2)から離れる方向であるドリル先端方向(D1)に突出している。
【選択図】図2
特許請求の範囲
【請求項1】
ワークの加工を行うためにロボットあるいは加工機に搭載されるエンドエフェクタであって、
前記ロボットあるいは加工機に取り付けられるベース部材と、
前記ワークを加工する加工子と、
前記ベース部材に支持され、前記加工子による加工時に前記ワークを加圧する加圧部材と、
前記ベース部材を基準として所定方向に対する前記ワークの表面の傾斜角度を検出する角度検出機構と、を備え、
前記角度検出機構は、
前記ワークの表面に接触する接触部を有する接触プローブであって、前記接触部が前記加圧部材に対し、前記所定方向のうち前記ベース部材から離れる方向に突出している接触プローブと、
前記接触プローブを、前記ベース部材に対して角度変化可能に支持し、かつ前記加圧部材に対して前記所定方向に進退可能に支持する支持構造と、
前記所定方向に対する前記接触プローブの傾斜角度を検出する角度検出センサとを有するエンドエフェクタ。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載のエンドエフェクタにおいて、
前記加圧部材は、前記所定方向に延びる筒形状であり、前記加工子と同心状になる位置に配置され、
前記接触プローブは、筒形状である基部を有し、
前記接触部は、前記基部における前記加工子の先端側の端部に設けられ、
前記基部は、前記加圧部材が前記ワークを加圧していない状態では前記所定方向に延びて前記加工子および前記加圧部材と前記同心状に配置される、エンドエフェクタ。
【請求項3】
請求項2に記載のエンドエフェクタにおいて、
前記加圧部材および前記基部のうちの少なくとも1つは、筒形状の側方に開いた開口を含む、エンドエフェクタ。
【請求項4】
請求項2に記載のエンドエフェクタにおいて、
前記接触部は、板形状の接触板を含み、
前記加圧部材は、前記所定方向から見て前記接触板に重なる範囲内に配置されている、エンドエフェクタ。
【請求項5】
請求項4に記載のエンドエフェクタにおいて、
前記基部は、筒形状の前記加圧部材の内側に配置され、
前記接触板は、筒形状の前記基部の軸心から離れる方向に突出している、
エンドエフェクタ。
【請求項6】
請求項5に記載のエンドエフェクタにおいて、
前記接触板における前記加圧部材に向き合う面は、凹む球面を有する、エンドエフェクタ。
【請求項7】
請求項2に記載のエンドエフェクタにおいて、
前記加圧部材および前記基部は、円筒形状であり、
前記基部は、前記加圧部材の内側に配置され、
前記加圧部材および前記基部は、前記加圧部材の内径と前記基部の外径との差が前記加工子の先端方向に向かって徐々に大きくなる、エンドエフェクタ。
【請求項8】
請求項2に記載のエンドエフェクタにおいて、
前記支持構造は、前記基部に付勢して、前記加圧部材が前記ワークを加圧していない状態において前記基部を前記加圧部材と同心になる位置に保持する付勢部材を含む、エンドエフェクタ。
【請求項9】
請求項1~8のいずれか1項に記載のエンドエフェクタにおいて、
前記支持構造は、前記接触プローブを支持する支持体と、前記接触プローブの周方向に互いに離間する位置に配置されるとともに前記所定方向に延びる3本以上の棒状部材を含み、
前記3本以上の棒状部材のそれぞれは、前記ベース部材に対して前記所定方向に進退可能に支持され、かつ、当該棒状部材の端部は、前記支持体の傾きに応じて前記所定方向に進退するように当該支持体に当接または接続しており、
前記角度検出センサは、前記ベース部材にそれぞれ固定され、前記3本以上の棒状部材の前記所定方向における進退量を測定する3個以上の進退センサを含み、前記3本以上の棒状部材の進退量から前記接触プローブの傾斜角度を検出する、エンドエフェクタ。
【請求項10】
請求項9に記載のエンドエフェクタにおいて、
前記棒状部材の端部は、前記支持体に前記所定方向から押し当てられることにより当接している、エンドエフェクタ。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロボットあるいは加工機に搭載され、ワークを加工するエンドエフェクタに関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
エンドエフェクタの一例として、下記特許文献1のロボットドリリングユニットが知られている。具体的に、この特許文献1には、ドリルを回転自在に支持するシリンダと、シリンダの下面に固定され、ワークを押さえつけるプレッシャフートと、シリンダとワークとの角度を検出する角度検出機構とを備えたドリリングユニットが開示されている。
【0003】
プレッシャフートは、ドリルを取り囲む円筒状の部材であるノーズピースと、ノーズピースを支持するコンプライアンス装置とを有する。コンプライアンス装置は、弾性材料で作られている。
【0004】
角度検出機構は、ワークに接触する3本のセンシングプローブと、センシングプローブの変位量を個別に検知する3個の変位量検知センサとを有する。各センシングプローブは、ノーズピースの外側に配置されている。各センシングプローブの下端の高さは、ノーズピースの下端の高さと一致している。
【0005】
上記のドリリングユニットでは、ドリルの軸線に対するワーク表面の傾斜角度を検出するときに、プレッシャフートのノーズピースおよび3本のセンシングプローブがワークの表面に同時に押し付けられる。この状態で、3本のセンシングプローブの変位量を3個の変位量検知センサによって検出することによって、ワーク表面の傾斜角度を検出する。ドリリングユニットは、検出された傾斜角度に基づいて、ドリルの軸線がワーク表面の法線と一致するように、ロボットアームによって角度調整される。
【先行技術文献】
【特許文献】
【0006】
実公平6-45286号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
上記特許文献1のドリリングユニットでは、3本のセンシングプローブの下端位置が、ノーズピースの下端位置に一致しており、角度検出時において、ノーズピースおよび3本のセンシングプローブがワークの表面に同時に押し付けられる。
【0008】
この構造では、ワークの表面がドリル軸線に対して傾斜している場合には、ノーズピースがワークに斜めに押し付けられた状態でドリリングユニットの角度を補正する。この時、ノーズピースおよび3本のセンシングプローブがワークに押し付けられた状態を維持するために、ドリリングユニットからワークへ大きい荷重が付加され続ける。
【0009】
ここで、ワークの剛性が比較的高い場合には問題ないが、ワークの厚みが薄く剛性が低い場合等の場合には、ドリリングユニットをワークに押し付けたままドリリングの傾きを修正するとワークが変形することが懸念される。加圧によってワークが変形した場合、ワークを初期の形状に戻す補正をすること、および補正後に角度検出動作を再度行うことなどの追加の作業が生じる。
【0010】
本開示は、上記のような事情に鑑みてなされたものであり、加圧によるワークの変形の影響を抑えながらワークの傾きを検出するエンドエフェクタを提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
固定補助具
1か月前
個人
折りたたみ工具
13日前
株式会社三協システム
製函機
11日前
株式会社三協システム
移載装置
10日前
CKD株式会社
把持装置
12日前
株式会社不二越
ロボット操作装置
18日前
株式会社不二越
ロボットシステム
24日前
SMC株式会社
着脱装置
11日前
日本精工株式会社
締結用工具
27日前
太陽パーツ株式会社
アシストスーツ
13日前
株式会社ミクロブ
把持装置
12日前
ARMA株式会社
ジョイントフレーム
25日前
トヨタ自動車株式会社
カプラ接続治具
1か月前
株式会社不二越
ロボットシステム
10日前
株式会社不二越
ロボットシステム
13日前
株式会社不二越
エッジ仕上げ装置
2日前
積水ハウス株式会社
フィルム除去具
1か月前
トヨタ自動車株式会社
歩行ロボット
16日前
株式会社不二越
垂直多関節ロボット
3日前
ライオン株式会社
移載システム
4日前
ダイハツ工業株式会社
移載治具
25日前
株式会社不二越
協働ロボットシステム
1か月前
大和ハウス工業株式会社
ねじ回転工具
11日前
株式会社不二越
ロボットシステム
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
セイコーエプソン株式会社
ロボット
1か月前
コネクテッドロボティクス株式会社
保持システム
1か月前
セイコーエプソン株式会社
ロボット
20日前
シヤチハタ株式会社
マーキング装置
16日前
シヤチハタ株式会社
マーキング装置
16日前
セイコーエプソン株式会社
ロボット
24日前
セイコーエプソン株式会社
ロボット
11日前
倉敷紡績株式会社
ハンドおよびコネクタ接続方法
2日前
タイガー産業株式会社
アタッチメント
1か月前
川崎重工業株式会社
作業設備
1か月前
株式会社マキタ
電動工具
11日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ