TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025133155
公報種別
公開特許公報(A)
公開日
2025-09-11
出願番号
2024030920
出願日
2024-03-01
発明の名称
ロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
13/00 20060101AFI20250904BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】スケールファクタを容易に算出してコンベアトラッキングに適用することができるロボットシステムを提供する。
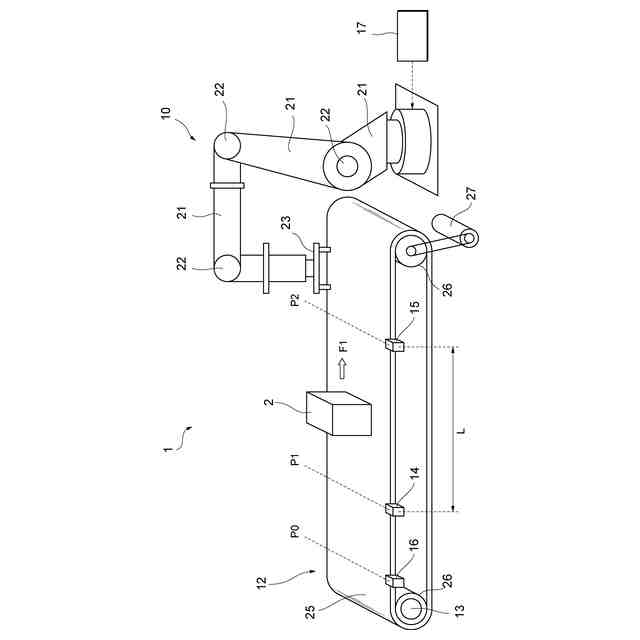
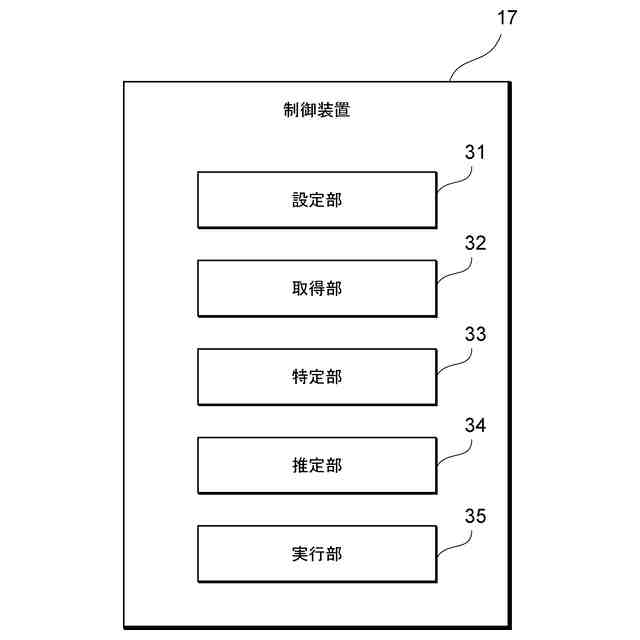
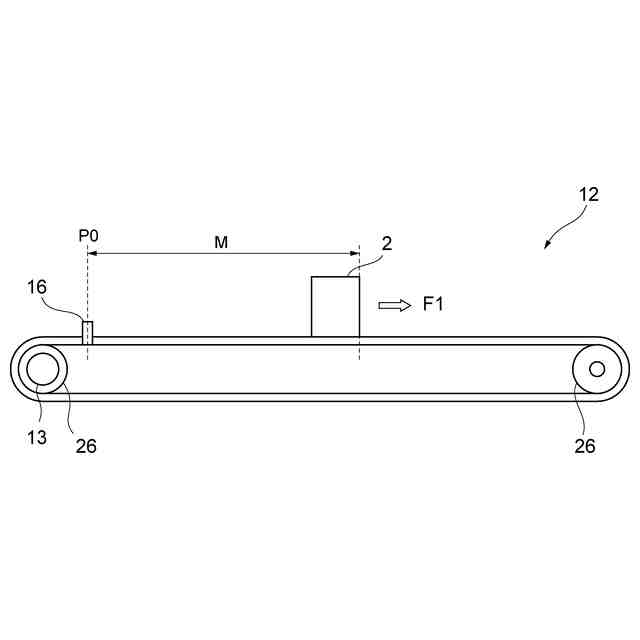
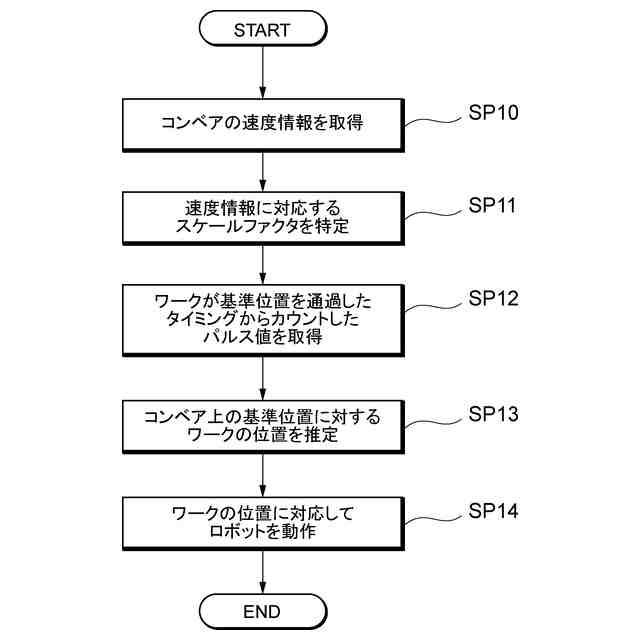
【解決手段】ロボットシステム1は、ワーク2が載置されるコンベア12と、ワーク2に対して所定の処理を行うロボット10と、コンベア12の送り量に対応するパルス値を出力するエンコーダ13と、エンコーダ13のパルス値を用いてロボット10を動作制御する制御装置17と、を備え、制御装置17は、コンベア12の速度情報を取得する取得部と、スケールファクタ及びコンベア12の速度が対応付けられた対応情報を用い、取得した速度情報に対応するスケールファクタを特定する特定部と、パルス値とスケールファクタとを用いて、コンベア12に載置されて移動するワーク2の位置を推定する推定部と、推定されたワーク2の位置に対応してロボット10を動作させる実行部と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
ワークが載置されるコンベアと、
前記ワークに対して所定の処理を行うロボットと、
前記コンベアの送り量に対応するパルス値を出力するエンコーダと、
前記エンコーダの前記パルス値を用いて前記ロボットを動作制御する制御装置と、
を備え、
前記制御装置は、
前記コンベアの速度情報を取得する取得部と、
前記パルス値と前記コンベアにおける移動距離との比率をスケールファクタとしたとき、前記スケールファクタ及び前記コンベアの速度が対応付けられた対応情報を用い、取得した前記速度情報に対応する前記スケールファクタを特定する特定部と、
前記パルス値と前記スケールファクタとを用いて、前記コンベアに載置されて移動する前記ワークの位置を推定する推定部と、
推定された前記ワークの位置に対応して前記ロボットを動作させる実行部と、
を備えることを特徴とするロボットシステム。
続きを表示(約 410 文字)
【請求項2】
前記推定部は、前記ワークが前記コンベアにおける基準位置を通過したタイミングからカウントした前記パルス値を用い、前記コンベア上の前記基準位置に対する前記ワークの位置を推定することを特徴とする請求項1に記載のロボットシステム。
【請求項3】
前記対応情報は、前記スケールファクタと前記コンベアの速度とが対応付けられた複数のサンプルを補間した情報であることを特徴とする請求項1又は2に記載のロボットシステム。
【請求項4】
前記サンプルは、3種類以上の異なる前記コンベアの速度のそれぞれと前記スケールファクタとが対応付けられたデータであることを特徴とする請求項3に記載のロボットシステム。
【請求項5】
前記サンプルの前記スケールファクタは、同じ速度に対応する複数の前記スケールファクタの平均値であることを特徴とする請求項4に記載のロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ワークが載置されるコンベアと、ワークに対して所定の処理を行うロボットとを具備するロボットシステムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
コンベアトラッキングでは、コンベアに載置されて移動するワークに追従して、ロボットを動作させる。
【0003】
例えば特許文献1においては、上流側と下流側にレーザセンサを設け、ワークがそれぞれのレーザセンサの位置を通過した時点におけるエンコーダ値によりスケールファクタを算出し、トラッキング補正を行うことが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-79075号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1においては速度を変更する場合、再度それぞれのレーザセンサを用いてスケールファクタを算出し直す作業が必要となる可能性がある。
【0006】
上記課題に鑑み、本発明は、スケールファクタを容易に算出してコンベアトラッキングに適用することができるロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係るロボットシステムは、ワークが載置されるコンベアと、前記ワークに対して所定の処理を行うロボットと、前記コンベアの送り量に対応するパルス値を出力するエンコーダと、前記エンコーダの前記パルス値を用いて前記ロボットを動作制御する制御装置と、を備え、前記制御装置は、前記コンベアの速度情報を取得する取得部と、前記パルス値と前記コンベアにおける移動距離との比率をスケールファクタとしたとき、前記スケールファクタ及び前記コンベアの速度が対応付けられた対応情報を用い、取得した前記速度情報に対応する前記スケールファクタを特定する特定部と、前記パルス値と前記スケールファクタとを用いて、前記コンベアに載置されて移動する前記ワークの位置を推定する推定部と、推定された前記ワークの位置に対応して前記ロボットを動作させる実行部と、を備える。
【0008】
また、ロボットシステムにおいて、前記推定部は、前記ワークが前記コンベアにおける基準位置を通過したタイミングからカウントした前記パルス値を用い、前記コンベア上の前記基準位置に対する前記ワークの位置を推定する。
【0009】
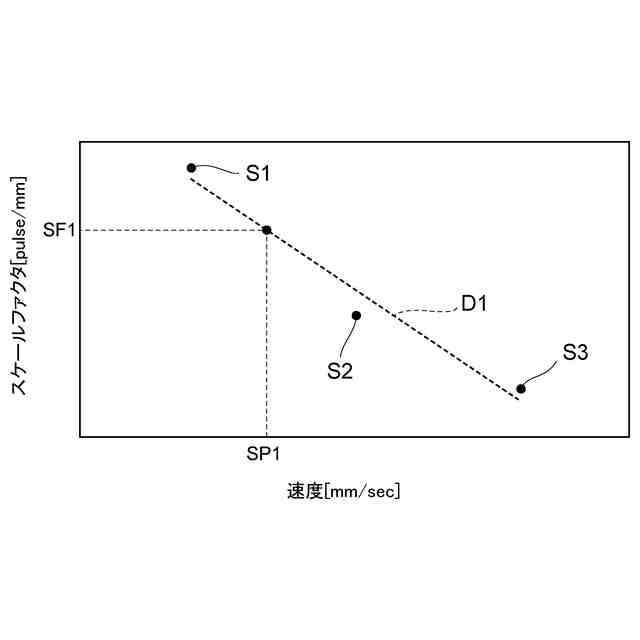
また、ロボットシステムにおいて、前記対応情報は、前記スケールファクタと前記コンベアの速度とが対応付けられた複数のサンプルを補間した情報である。
【0010】
また、ロボットシステムにおいて、前記サンプルは、3種類以上の異なる前記コンベアの速度のそれぞれと前記スケールファクタとが対応付けられたデータである。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
他の特許を見る

 特許ウォッチ
特許ウォッチ