TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025112205
公報種別
公開特許公報(A)
公開日
2025-07-31
出願番号
2024006365
出願日
2024-01-18
発明の名称
作業設備
出願人
川崎重工業株式会社
代理人
弁理士法人前田特許事務所
主分類
B25J
13/00 20060101AFI20250724BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ワークピースの搬送効率を向上させる。
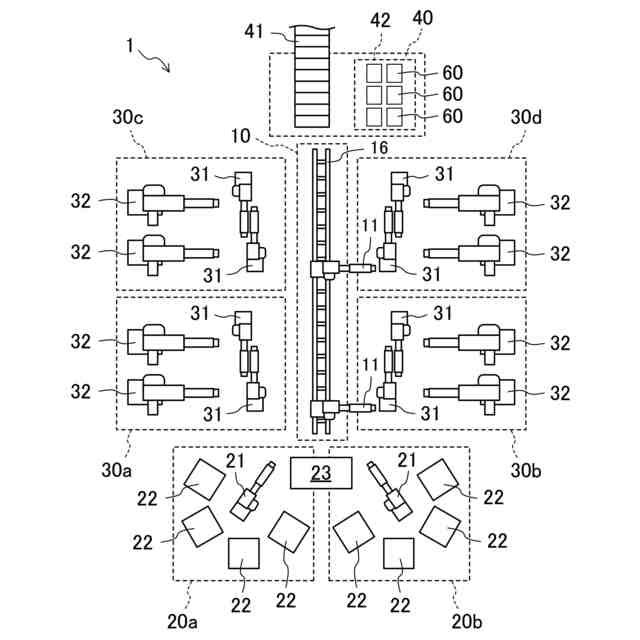
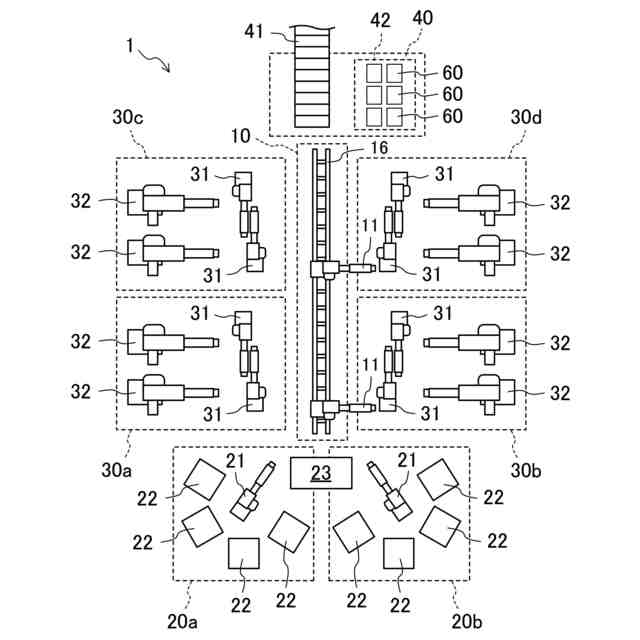
【解決手段】作業設備1は、ワークピースWを支持するアーム13を有しかつワークピースWを搬送する搬送ロボット11と、搬送ロボット11が走行する走行路16とを含む搬送エリア10と、走行路16の端の位置に配置され、搬送ロボット11が搬送するワークピースWを保管する保管エリア20と、搬送エリア10の周囲に配置され、ワークピースWに対して作業を行う作業ロボット32を含み、互いに独立して作業を行う複数の作業エリア30と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
ワークピースを支持するアームを有しかつ前記ワークピースを搬送する搬送ロボットと、前記搬送ロボットが走行する走行路とを含む搬送エリアと、
前記走行路の端の位置に配置され、前記搬送ロボットが搬送する前記ワークピースを保管する保管エリアと、
前記搬送エリアの周囲に配置され、前記ワークピースに対して作業を行う作業ロボットを含み、互いに独立して作業を行う複数の作業エリアと、を備える作業設備。
続きを表示(約 730 文字)
【請求項2】
請求項1に記載の作業設備において、
前記搬送ロボットは、前記ワークピースが配置されたパレットを搬送し、
前記保管エリアは、前記パレットに前記ワークピースを配置する配膳ロボットを含む作業設備。
【請求項3】
請求項1に記載の作業設備において、
前記走行路における前記保管エリアとは反対側の端の位置に配置され、作業が完了した前記ワークピースを搬出する搬出エリアを更に備える作業設備。
【請求項4】
請求項2に記載の作業設備において、
前記作業エリアは、前記パレットごと前記ワークピースを保持する保持ロボットを更に含み、
前記搬送ロボットは、前記パレットを前記保管エリアから受け取って前記保持ロボットに渡す作業設備。
【請求項5】
請求項1に記載の作業設備において、
複数の前記作業エリアは、前記走行路を挟んで配置されている作業設備。
【請求項6】
請求項1~5のいずれか1つに記載の作業設備において、
前記ワークピースは、パーツと、前記パーツの取付対象となる対象物とを含み、
前記対象物を支持するアームを有しかつ記保管エリアと前記作業エリアとの間で前記対象物を搬送する第2搬送ロボットを含み、前記搬送エリアよりも上側に位置する第2搬送エリアを更に備え、
前記搬送ロボットは、前記保管エリアと前記作業エリアとの間で前記パーツを搬送する作業設備。
【請求項7】
請求項6に記載の作業設備において、
前記第2搬送エリアは、前記第2搬送ロボットが走行する第2走行路を更に含む作業設備。
発明の詳細な説明
【技術分野】
【0001】
ここに開示する技術は、作業設備に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1は、従来の作業設備を開示する。従来の作業設備は、被搬送物を保持する保持部と、保持部とともに被搬送物を水平面内で搬送方向に駆動可能なアームと、を備えた搬送ロボットが、搬送方向に複数配設される。従来の作業設備は、搬送路に沿って設けられ、被搬送物を支持する支持台を有し、搬送ロボットは、保持した被搬送物を支持台上で摺動させながら搬送し、搬送方向下流側に位置する他の搬送ロボットに被搬送物を渡す。
【先行技術文献】
【特許文献】
【0003】
特許第4274101号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業設備の作業効率を向上させるには、実際の作業の効率化だけでなく、ワークピースの搬送効率を向上させることが求められる。特許文献1に記載のような従来の作業設備は、ワークピースを上流側から下流側に直線的に流して、ワークピースに対して順次作業を行う構成である。このような構成では、作業待ちが生じるとワークピースの搬送が滞ってしまい、搬送効率を向上させることが困難である。
【課題を解決するための手段】
【0005】
ここに開示する技術は、作業設備に関する。作業設備は、
ワークピースを支持するアームを有しかつ前記ワークピースを搬送する搬送ロボットと、前記搬送ロボットが走行する走行路とを含む搬送エリアと、
前記走行路の端の位置に配置され、前記搬送ロボットが搬送する前記ワークピースを保管する保管エリアと、
前記搬送エリアの周囲に配置され、前記ワークピースに対して作業を行う作業ロボットを含み、互いに独立して作業を行う複数の作業エリアと、
を備える。
【発明の効果】
【0006】
独立して作業を行う作業エリアが搬送エリアの周囲に配置されることで、ワークピースの、保管エリアからの作業エリアへの移動、並びに作業エリア間での移動を1つの搬送ロボットにより行うことができ、ワークピースの搬送効率を向上させることができる。
【図面の簡単な説明】
【0007】
図1は、実施形態1に係る作業設備における各エリアの配置を示す概略斜視図である。
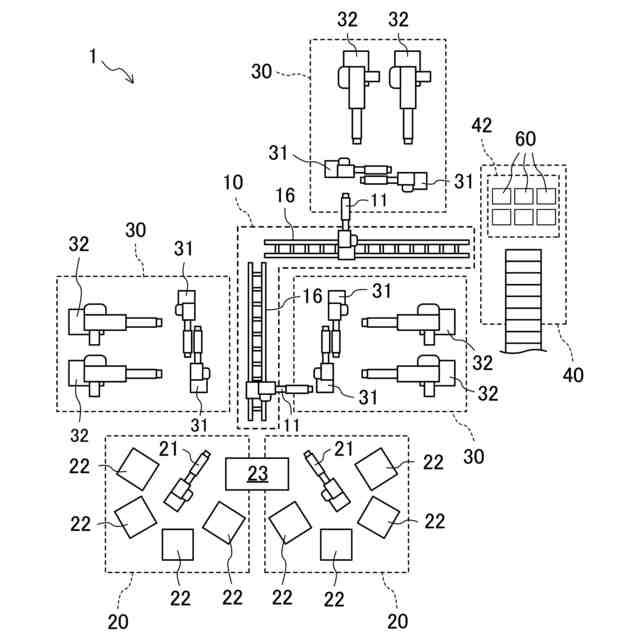
図2は、作業設備の平面図である。
図3は、作業設備を保管エリア側から見た図である。
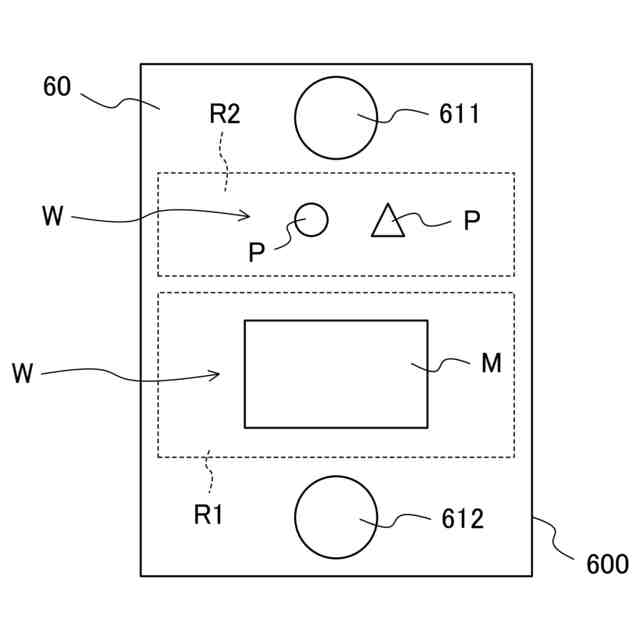
図4は、搬送に用いられるパレットの一例を示す平面図である。
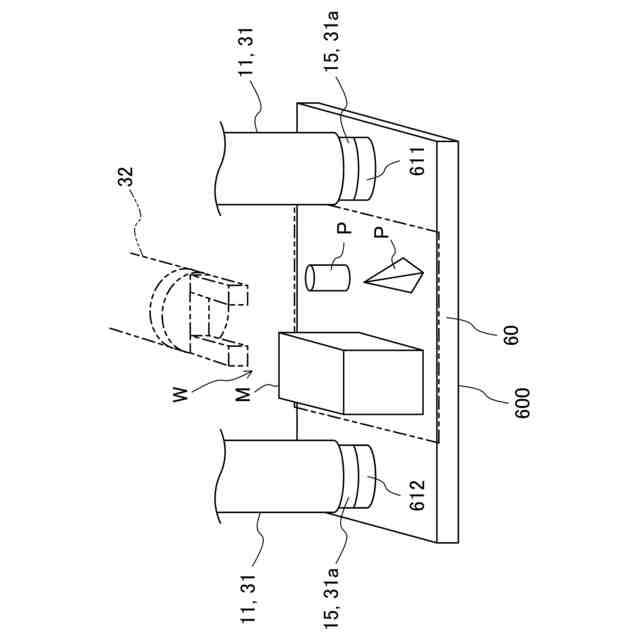
図5は、搬送ロボットと保持ロボットとの間でパレットを渡す動作を示す概略図である。
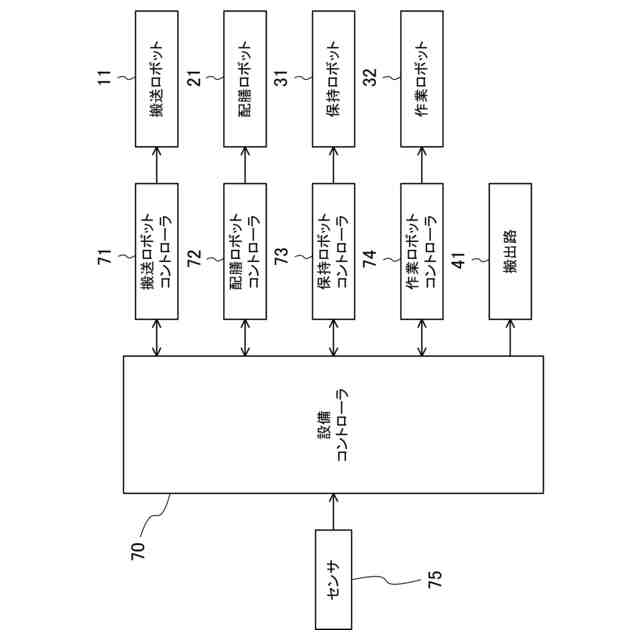
図6は、作業設備の制御システムを示すブロック図である。
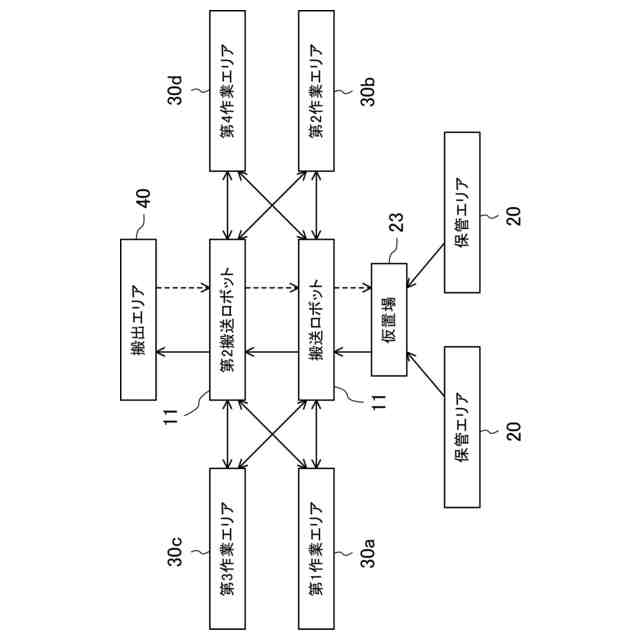
図7は、エリア間におけるワークピース及びパレットの移動ルートを示す概略図である。
図8は、実施形態1に係る作業設備の変形例を示す平面図である。
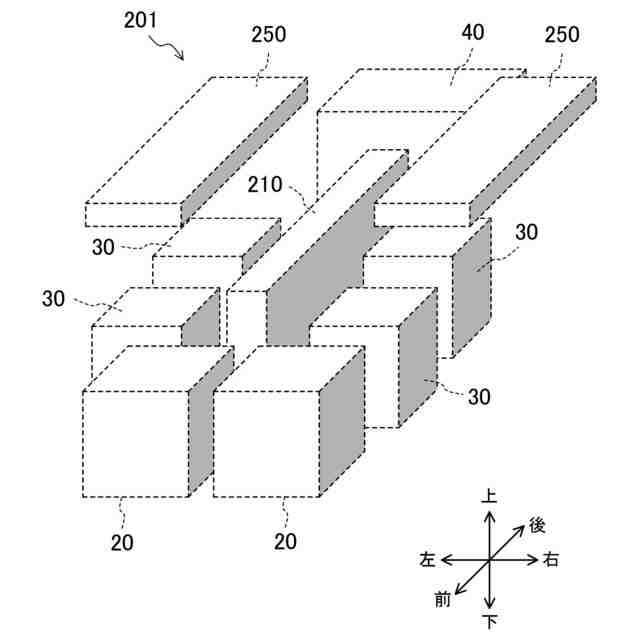
図9は、実施形態2に係る作業設備における各エリアの配置を示す概略斜視図である。
図10は、実施形態2に係る作業設備の第2搬送エリアを示す平面図である。
図11は、実施形態2に係る作業設備を保管エリア側から見た図である。
【発明を実施するための形態】
【0008】
以下、作業設備の実施形態について、図面を参照しながら説明する。ここで説明する監視システムは例示である。
【0009】
(実施形態1)
〔作業設備の全体構造〕
図1は、作業設備1の各エリアの配置を示す概略斜視図である。作業設備1は、例えば、ワークピースWの組み立て作業やワークピースWに対する溶接作業を行う設備である。ワークピースWは、例えば、エンジンなどのデバイス、ボデーなどの車体を構成するパーツ、計算機などを含む。
【0010】
作業設備1における、前、後、右、左、上、及び、下は、図1に示す矢印のように定義する。作業設備1の前後方向は、図1の紙面左手前と紙面右奥とを結ぶ方向である。作業設備1の前は紙面左手前側であり、作業設備1の後は紙面右奥側である。作業設備1の右は紙面右側であり、作業設備1の左は紙面左側である。作業設備1の上は紙面上側であり、作業設備1の左は紙面下側である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
1か月前
日東精工株式会社
電動ドライバ
2か月前
株式会社ジャノメ
ロボット
25日前
トヨタ自動車株式会社
関節機構
2か月前
株式会社ダイヘン
移動体
2か月前
住友重機械工業株式会社
教示装置
22日前
個人
ペグハンマおよびペグハンマ用部品
29日前
株式会社ダイヘン
搬送装置
29日前
東京都公立大学法人
対象物把持装置
2か月前
川崎重工業株式会社
ロボット
23日前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社スター精機
吸着パッド
1か月前
学校法人五島育英会
アーム機構
2か月前
株式会社スター精機
吸着パッド
1か月前
住友重機械工業株式会社
支援装置
29日前
住友重機械工業株式会社
支援装置
29日前
庄内機械株式会社
釘打装置
2か月前
株式会社PILLAR
チューブ保持治具
2か月前
株式会社マキタ
電気機器
23日前
オークラ輸送機株式会社
ハンド装置
2か月前
株式会社スター精機
産業用ロボット
1か月前
アピュアン株式会社
衝撃工具
1か月前
ホシデン株式会社
分解用治具
29日前
オークラ輸送機株式会社
ハンド装置
1か月前
株式会社マキタ
電動作業機
2か月前
株式会社リコー
多関節ロボット
29日前
株式会社マキタ
電動作業機
2か月前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
25日前
工機ホールディングス株式会社
作業機
25日前
株式会社リコー
多関節ロボット
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ


































