TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025082010
公報種別
公開特許公報(A)
公開日
2025-05-28
出願番号
2023195184
出願日
2023-11-16
発明の名称
アーム機構
出願人
学校法人五島育英会
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20250521BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】給電コイルを含む第1アーム部材に対して受電コイルを含む第2アーム部材を着脱可能とする。
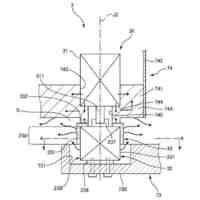
【解決手段】アーム機構10の第1アーム部材20は、筒状の第1筐体21と、第1筐体21に挿入された第1シャフト22と、電力を無線で給電する給電コイル23と、第1筐体21に挿入され、第1筐体21に対して非回転かつ給電コイル23を保持する第1コイルホルダ24と、を備える。さらに、第2アーム部材30は、第1筐体21に装着されたときに第1筐体21に対して非回転の第2筐体31と、第2筐体31に挿入され、第1シャフト22とともに回転する第2シャフトと、給電コイル23からの電力を受電する受電コイル33と、第2筐体31に挿入され、受電コイル33を保持し、第2シャフト31とともに回転する第2コイルホルダ34と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
第1アーム部材と、
前記第1アーム部材に対して着脱可能に構成された第2アーム部材と、を備え、
前記第1アーム部材は、
筒状の第1筐体と、
前記第1筐体に挿入された状態で前記第1筐体により支持され、モータの回転軸の回転に伴って前記第1筐体に対して回転する第1シャフトと、
電力を無線で給電するように構成された給電コイルと、
前記第1筐体に挿入された状態で前記第1筐体により支持され、前記第1筐体に対して非回転かつ前記給電コイルを保持する第1コイルホルダと、を備え、
前記第2アーム部材は、
前記第1筐体と一致する中心軸を有する筒状で、前記第1筐体に対して着脱可能で、前記第1筐体に装着されたときに前記第1筐体に対して非回転の第2筐体と、
前記第2筐体に挿入された状態で前記第2筐体により支持され、前記第2筐体が前記第1筐体に装着されたときに前記第1シャフトに連結されかつ前記第1シャフトとともに回転する第2シャフトと、
前記給電コイルからの前記電力を受電するように構成された受電コイルと、
前記第2筐体に挿入された状態で前記第2筐体により回転可能に支持され、前記受電コイルを保持し、前記第2シャフトとともに回転する第2コイルホルダと、を備える、
アーム機構。
続きを表示(約 580 文字)
【請求項2】
前記第1筐体に前記第2筐体が装着されたときに、前記給電コイルと前記受電コイルとが、前記第1筐体と前記第2筐体との組合せからなる筒状部内に収容される、
請求項1に記載のアーム機構。
【請求項3】
前記第1筐体に前記第2筐体が装着されたときに、前記給電コイルと前記受電コイルとが前記中心軸に直交する径方向に重なる位置に配置される、
請求項1に記載のアーム機構。
【請求項4】
前記第1シャフトの前記第2シャフト側の一端が、前記第1筐体と前記第1コイルホルダとの少なくとも一方の内部に配置されている、
請求項1に記載のアーム機構。
【請求項5】
前記第2シャフトの前記第1シャフト側の一端が、前記第2筐体と前記第2コイルホルダとの少なくとも一方の内部に配置されている、
請求項1又は4に記載のアーム機構。
【請求項6】
前記第2アーム部材は、
前記第2筐体を覆い、前記第2筐体に軸受けを介して回転可能に支持された外殻部材と、
前記外殻部材と前記第2シャフトとを連結し、前記アーム機構の外部の部材が固定されるように構成され、前記第2シャフトとともに回転する固定部材37と、をさらに備える、
請求項1に記載のアーム機構。
発明の詳細な説明
【技術分野】
【0001】
本発明は、マニュピレータなどのロボットアームに用いられるアーム機構に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、第1対象物(101)及び給電コイル(112)を含む第1アーム部材と、第2対象物(102)及び受電コイル(125)を含み、第1アーム部材に対して回転する第2アーム部材とを備えるアーム機構が開示されている。このアーム機構では、給電コイル及び受電コイルがユニット化されて、第1対象物及び第2対象物に着脱される。
【先行技術文献】
【特許文献】
【0003】
特許第6995941号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の構造では、第1対象物と第2対象物とが互いに着脱可能となっていないので、第1アーム部材と第2アーム部材とをまとめて着脱できない。ロボットアームの仕様によっては、第1アーム部材(つまり第1対象物と給電コイルとのセット)に対して第2アーム部材(つまり第2対象物と受電コイルとのセット)を着脱可能とする必要も想定される。例えば、アーム部材を交換したいときに、前記の着脱が必要となる。
【0005】
本発明は、給電コイルを含む第1アーム部材に対して受電コイルを含む第2アーム部材を着脱可能とすることを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、本発明に係るアーム機構は、第1アーム部材と、前記第1アーム部材に対して着脱可能に構成された第2アーム部材と、を備え、前記第1アーム部材は、筒状の第1筐体と、前記第1筐体に挿入された状態で前記第1筐体により支持され、モータの回転軸の回転に伴って前記第1筐体に対して回転する第1シャフトと、電力を無線で給電するように構成された給電コイルと、前記第1筐体に挿入された状態で前記第1筐体により支持され、前記第1筐体に対して非回転かつ前記給電コイルを保持する第1コイルホルダと、を備え、前記第2アーム部材は、前記第1筐体と一致する中心軸を有する筒状で、前記第1筐体に対して着脱可能で、前記第1筐体に装着されたときに前記第1筐体に対して非回転の第2筐体と、前記第2筐体に挿入された状態で前記第2筐体により支持され、前記第2筐体が前記第1筐体に装着されたときに前記第1シャフトに連結されかつ前記第1シャフトとともに回転する第2シャフトと、前記給電コイルからの前記電力を受電するように構成された受電コイルと、前記第2筐体に挿入された状態で前記第2筐体により回転可能に支持され、前記受電コイルを保持し、前記第2シャフトとともに回転する第2コイルホルダと、を備える。
【発明の効果】
【0007】
本発明によれば、給電コイルを含む第1アーム部材に対して受電コイルを含む第2アーム部材を着脱できる。
【図面の簡単な説明】
【0008】
図1は、本発明の実施形態に係るアーム機構を含むロボットアームの斜視図である。
図2は、本発明の実施形態に係るアーム機構の斜視図である。
図3は、図1のアーム機構の断面図である。
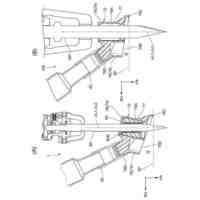
図4(A)は、図1のアーム機構が備える第1アーム部材の斜視図である。図4(B)は、第1アーム部材からカバーを取り除いた残り部分の斜視図である。
図5は、図1のアーム機構が備える第2アーム部材の斜視図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を、図面を参照して説明する。なお、図面において、複数の要素について、適宜、その一部のみに符号を付している。また、図3では、ハッチングの他、網掛け、ドットなども断面を示す。
【0010】
図1に示すように、本実施形態に係る複数のアーム機構10は、産業ロボットアームのマニュピレータ1を構成する。各アーム機構10は、第1アーム部材20と、第2アーム部材30と、を備える。各アーム機構10は、同様の構成を有する、アーム機構10の第2アーム部材30(後述の固定部材37)には、他のアーム機構10と接続部材5を介して固定されるか、把持部品などの機械部品とのうちの一方が直接又は所定部材を介して固定される。以下、1つのアーム機構10を図2~図5を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
学校法人五島育英会
アーム機構
3か月前
学校法人五島育英会
機械用部材および機械用部材の製造方法
3日前
学校法人五島育英会
視覚障害者案内用の白杖、及び、これを用いた視覚障害者用の案内システム
1か月前
学校法人五島育英会
少なくとも先端部分をテーパー状に加工した杭を設計するための周面抵抗力推定方法及び押込み抵抗力推定方法、杭設計方法、並びに杭
13日前
個人
固定補助具
9日前
株式会社ジャノメ
ロボット
1か月前
住友重機械工業株式会社
教示装置
1か月前
株式会社ダイヘン
搬送装置
1か月前
個人
ペグハンマおよびペグハンマ用部品
1か月前
株式会社不二越
ロボットシステム
3日前
日本精工株式会社
締結用工具
6日前
川崎重工業株式会社
ロボット
1か月前
トヨタ自動車株式会社
カプラ接続治具
13日前
工機ホールディングス株式会社
作業機
1か月前
ARMA株式会社
ジョイントフレーム
4日前
工機ホールディングス株式会社
作業機
1か月前
住友重機械工業株式会社
支援装置
1か月前
住友重機械工業株式会社
支援装置
1か月前
ホシデン株式会社
分解用治具
1か月前
積水ハウス株式会社
フィルム除去具
25日前
株式会社マキタ
電気機器
1か月前
株式会社不二越
協働ロボットシステム
1か月前
株式会社リコー
多関節ロボット
1か月前
工機ホールディングス株式会社
作業機
1か月前
ダイハツ工業株式会社
移載治具
4日前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
工機ホールディングス株式会社
作業機
1か月前
株式会社清水製作所
電動工具の吊下げ具
1か月前
株式会社不二越
ロボットシステム
19日前
SMC株式会社
ベルヌーイグリッパ
1か月前
セイコーエプソン株式会社
ロボット
3日前
セイコーエプソン株式会社
ロボット
9日前
コネクテッドロボティクス株式会社
保持システム
27日前
川崎重工業株式会社
作業設備
1か月前
工機ホールディングス株式会社
集塵装置及び作業機
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ