TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025077560
公報種別
公開特許公報(A)
公開日
2025-05-19
出願番号
2023189841
出願日
2023-11-07
発明の名称
対象物把持装置
出願人
東京都公立大学法人
代理人
個人
主分類
B25J
15/08 20060101AFI20250512BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】従来の構成に比べて、駆動源の数を減らすこと。
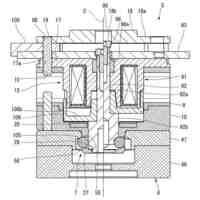
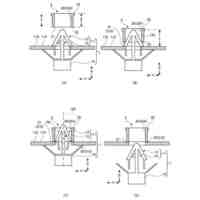
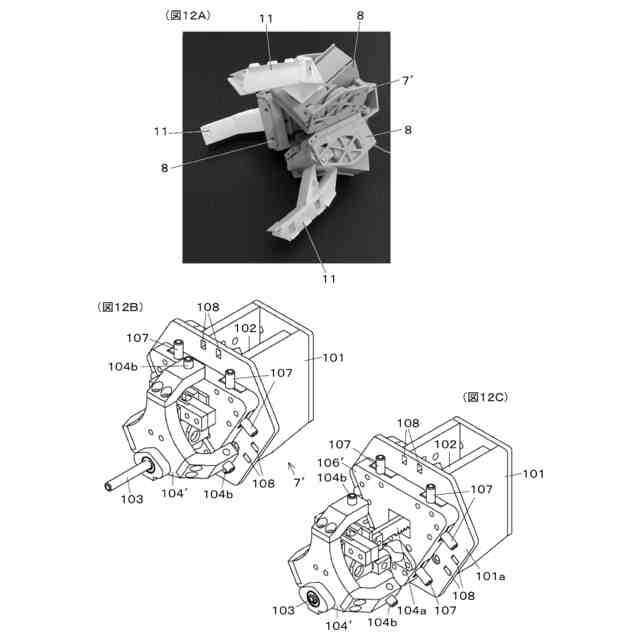
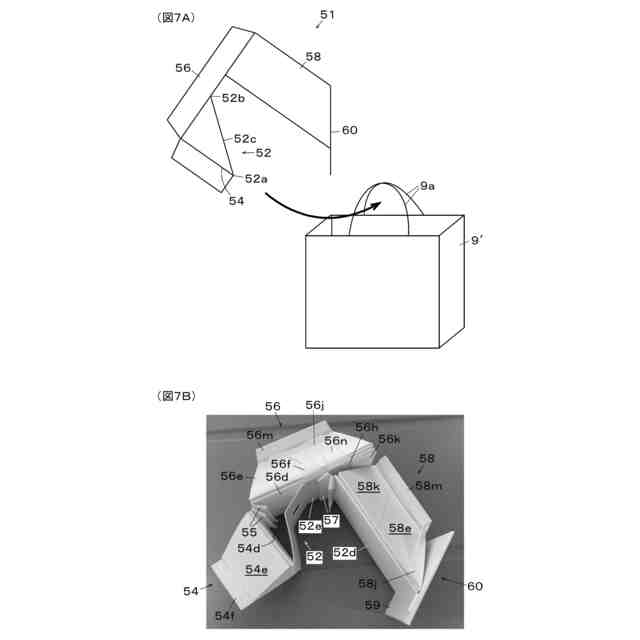
【解決手段】対象物(9)を把持するハンド部(11,51)を支持するソケット部(8)は、駆動部(7)に支持される筐体部(111)と、筐体部(111)に回転可能に支持され且つハンド部(11,51)を着脱可能に支持する支持部(122)と、被伝達部(114~117)から駆動が伝達されて支持部(122)を回転させてハンド部(11,51)を対象物(9)に対して接近または離間させる方向に移動させる第1の伝達部(118)と、被伝達部(114~117)から駆動が伝達されて支持部(122)からハンド部(11,51)を離脱させる第2の伝達部(119)と、を有し、ハンド部(11,51)を離脱させる期間に対応して第2の伝達部(119)に駆動が伝達され且つ第1の伝達部(118)は駆動が非伝達となる対象物把持装置(1)。
【選択図】図12
特許請求の範囲
【請求項1】
対象物に接触して把持するハンド部と、
前記ハンド部を支持するソケット部と、
前記ソケット部を支持し前記ソケット部を駆動する駆動部と、
を備えた対象物把持装置であって、
前記ソケット部は、
前記駆動部に支持される筐体部と、
前記筐体部に回転可能に支持され且つ前記ハンド部を着脱可能に支持する支持部と、
前記駆動部からの駆動が伝達される被伝達部と、
前記被伝達部から駆動が伝達されて前記支持部を回転させて前記ハンド部を前記対象物に対して接近または離間させる方向に移動させる第1の伝達部と、
前記被伝達部から駆動が伝達されて前記支持部から前記ハンド部を離脱させる第2の伝達部と、
を有し、
前記ハンド部を離脱させる期間に対応して、前記第2の伝達部が前記被伝達部から駆動が伝達され、且つ、前記第1の伝達部は前記被伝達部からの駆動が非伝達となる、
ことを特徴とする対象物把持装置。
続きを表示(約 500 文字)
【請求項2】
歯車を有する前記被伝達部と、
前記被伝達部の歯車に噛み合う第1の噛み合い部と、前記第1の噛み合い部に隣接して設けられ且つ前記被伝達部の歯車と噛み合わず駆動が伝達されない第1の空転部と、を有する前記第1の伝達部と、
前記第1の伝達部と同軸上に配置された前記第2の伝達部であって、前記被伝達部の歯車に噛み合う第2の噛み合い部、を有する前記第2の伝達部と、
を備え、
前記被伝達部の回転の位相に対して、前記第1の空転部に対応する位置に前記第2の噛み合い部が配置された
ことを特徴とする請求項1に記載の対象物把持装置。
【請求項3】
前記駆動部に対して着脱可能に支持される前記ソケット部、
を備えたことを特徴とする請求項1に記載の対象物把持装置。
【請求項4】
複数のソケット部が支持される前記駆動部であって、駆動源の駆動に伴って作動する1つの作動体を有する前記駆動部と、
各ソケット部の前記被伝達部に駆動を伝達する前記作動体と、
を備えたことを特徴とする請求項1に記載の対象物把持装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を把持する対象物把持装置に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
コンビニエンスストアやスーパーマーケット等の商品陳列棚に陳列される物品を移動させたり、工場で生産された製品等の対象物を把持して移動させたり、医療現場で除菌済みの用具や感染の恐れのある物品や生体試料等を移動させたりするロボットアームやマニピュレータなどとも呼ばれる対象物把持装置に関し、下記の特許文献1に記載の技術が公知である。
【0003】
特許文献1(特開2021-094642号公報)には、一対の把持部材(106)で対象物を把持する対象物把持装置(100)において、各把持部材(106)を支持するスライダ部材(103)に接近、離間させるためのモータをスライダベース(102)に内蔵させると共に、各把持部材(106)を支持するアーム部材(104)の傾斜角度を変更するためのモータをスライダ部材(103)に内蔵させた構成が記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2021-094642号公報(「0018」、図2-図4)
【発明の概要】
【発明が解決しようとする課題】
【0005】
(従来技術の問題点)
特許文献1に記載の従来技術では、把持部材で対象物を把持するために複数のモータ(駆動源)が必要となり、コストが上昇すると共に、制御も複雑化する問題がある。
特に、対象物把持装置が使用される状況、分野として、食品や医薬品、医療分野等の衛生面で注意が必要な場合がある。このような分野では、衛生環境を保つために、対象物に直接接触する部分(ハンド部、把持部)が使い捨てであることが好ましい場合がある。使い捨ての構成の場合、使用済みのハンド部を取り外した後に、未使用のハンド部を速やかに装着可能な構成、すなわち、ハンド部の着脱が容易な構成であることが作業効率の観点から望まれる。特に、未使用のハンド部に次々と交換ができるような構成とすることが望ましい。ハンド部を離脱させるためにモータをさらに追加すると、更なるコスト上昇や、制御が複雑化する問題がある。
【0006】
本発明は、従来の構成に比べて、駆動源の数を減らすことを技術的課題とする。
【課題を解決するための手段】
【0007】
前記技術的課題を解決するために、請求項1に記載の発明の対象物把持装置は、
対象物に接触して把持するハンド部と、
前記ハンド部を支持するソケット部と、
前記ソケット部を支持し前記ソケット部を駆動する駆動部と、
を備えた対象物把持装置であって、
前記ソケット部は、
前記駆動部に支持される筐体部と、
前記筐体部に回転可能に支持され且つ前記ハンド部を着脱可能に支持する支持部と、
前記駆動部からの駆動が伝達される被伝達部と、
前記被伝達部から駆動が伝達されて前記支持部を回転させて前記ハンド部を前記対象物に対して接近または離間させる方向に移動させる第1の伝達部と、
前記被伝達部から駆動が伝達されて前記支持部から前記ハンド部を離脱させる第2の伝達部と、
を有し、
前記ハンド部を離脱させる期間に対応して、前記第2の伝達部が前記被伝達部から駆動が伝達され、且つ、前記第1の伝達部は前記被伝達部からの駆動が非伝達となる、
ことを特徴とする。
【0008】
請求項2に記載の発明は、請求項1に記載の対象物把持装置において、
歯車を有する前記被伝達部と、
前記被伝達部の歯車に噛み合う第1の噛み合い部と、前記第1の噛み合い部に隣接して設けられ且つ前記被伝達部の歯車と噛み合わず駆動が伝達されない第1の空転部と、を有する前記第1の伝達部と、
前記第1の伝達部と同軸上に配置された前記第2の伝達部であって、前記被伝達部の歯車に噛み合う第2の噛み合い部、を有する前記第2の伝達部と、
を備え、
前記被伝達部の回転の位相に対して、前記第1の空転部に対応する位置に前記第2の噛み合い部が配置された
ことを特徴とする。
【0009】
請求項3に記載の発明は、請求項1に記載の対象物把持装置において、
前記駆動部に対して着脱可能に支持される前記ソケット部、
を備えたことを特徴とする。
【0010】
請求項4に記載の発明は、請求項1に記載の対象物把持装置において、
複数のソケット部が支持される前記駆動部であって、駆動源の駆動に伴って作動する1つの作動体を有する前記駆動部と、
各ソケット部の前記被伝達部に接触して駆動を伝達する前記作動体と、
を備えたことを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ザイテック
吸着装置
7日前
日東精工株式会社
電動ドライバ
1か月前
株式会社ダイヘン
移動体
1か月前
トヨタ自動車株式会社
関節機構
1か月前
個人
ペグハンマおよびペグハンマ用部品
今日
株式会社ダイヘン
搬送装置
今日
学校法人五島育英会
アーム機構
1か月前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
22日前
工機ホールディングス株式会社
作業機
22日前
株式会社スター精機
吸着パッド
1か月前
株式会社スター精機
吸着パッド
1か月前
住友重機械工業株式会社
支援装置
今日
株式会社PILLAR
チューブ保持治具
1か月前
住友重機械工業株式会社
支援装置
今日
ホシデン株式会社
分解用治具
今日
株式会社スター精機
産業用ロボット
28日前
オークラ輸送機株式会社
ハンド装置
15日前
アピュアン株式会社
衝撃工具
2日前
株式会社リコー
多関節ロボット
1か月前
株式会社マキタ
電動作業機
1か月前
株式会社マキタ
電動作業機
1か月前
川崎重工業株式会社
ロボットシステム
16日前
株式会社リコー
多関節ロボット
今日
株式会社安川電機
ロボット
28日前
株式会社ジャノメ
ロボット
24日前
株式会社ダイヘン
ロボット制御システム
1か月前
株式会社安川電機
ロボット
28日前
株式会社安川電機
ロボット
28日前
セイコーエプソン株式会社
ロボット
1か月前
小倉クラッチ株式会社
ロボット用ツール交換装置
1か月前
セイコーエプソン株式会社
ロボット
10日前
株式会社マキタ
電動工具
14日前
株式会社マキタ
回転工具
17日前
オムロン株式会社
撮影システム
1か月前
個人
工具、工具セット、部材取外し方法
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ